Welding with Positionner
简介
本案例演示如何通过RoboDK实现储罐焊接仿真,项目包含一个储罐模型,一个带有单轴定位器的ABB焊接机器人工作站。
Video:使用 SolidWorks 和RoboDK 进行机器人焊接:https://www.youtube.com/watch?v=5Gcy_zg3sH4。
Note:焊接插件使用指南点击此链接。
Tip:Fusion 360插件使用指南点击此链接。
Tip:你可以在资源库中找到本例中的 RoboDK项目:Synchronization-and-Welding-with-ABB-02.
机器人焊接项目
要完成这个机器人焊接项目,首先应在资源库中下载这个带有定位器的RoboDK 机器人焊接文件。然后在Fusion 360 中完成焊接路径。最后在RoboDK 中修改优化机器人路径。
导入模型
首先,我们需要在Fusion 360 中导入零件和焊接路径。
Tip:更多有关如何在Fusion 导入零件、曲线和点,请参考此视频:https://www.youtube.com/watch?v=gxob-94fNLo。
在Fusion360 导入模型:
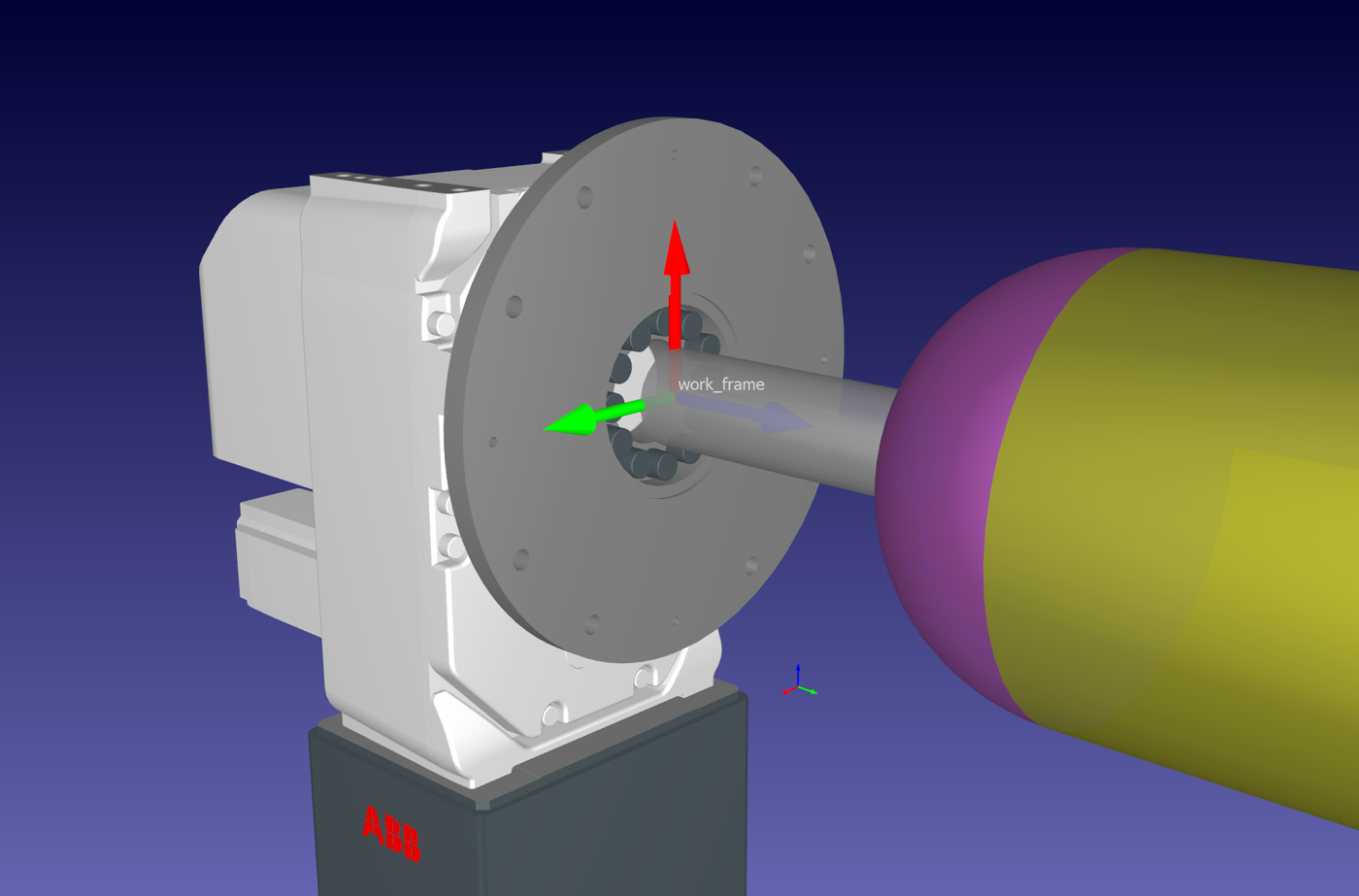
1.在RoboDK中选中定位器法兰坐标系(用于定位储罐)
2.进入Fusion 360 ,选择工具栏UTILITIES的RoboDK 选项卡,选择按钮:Load Model-RoboDK。
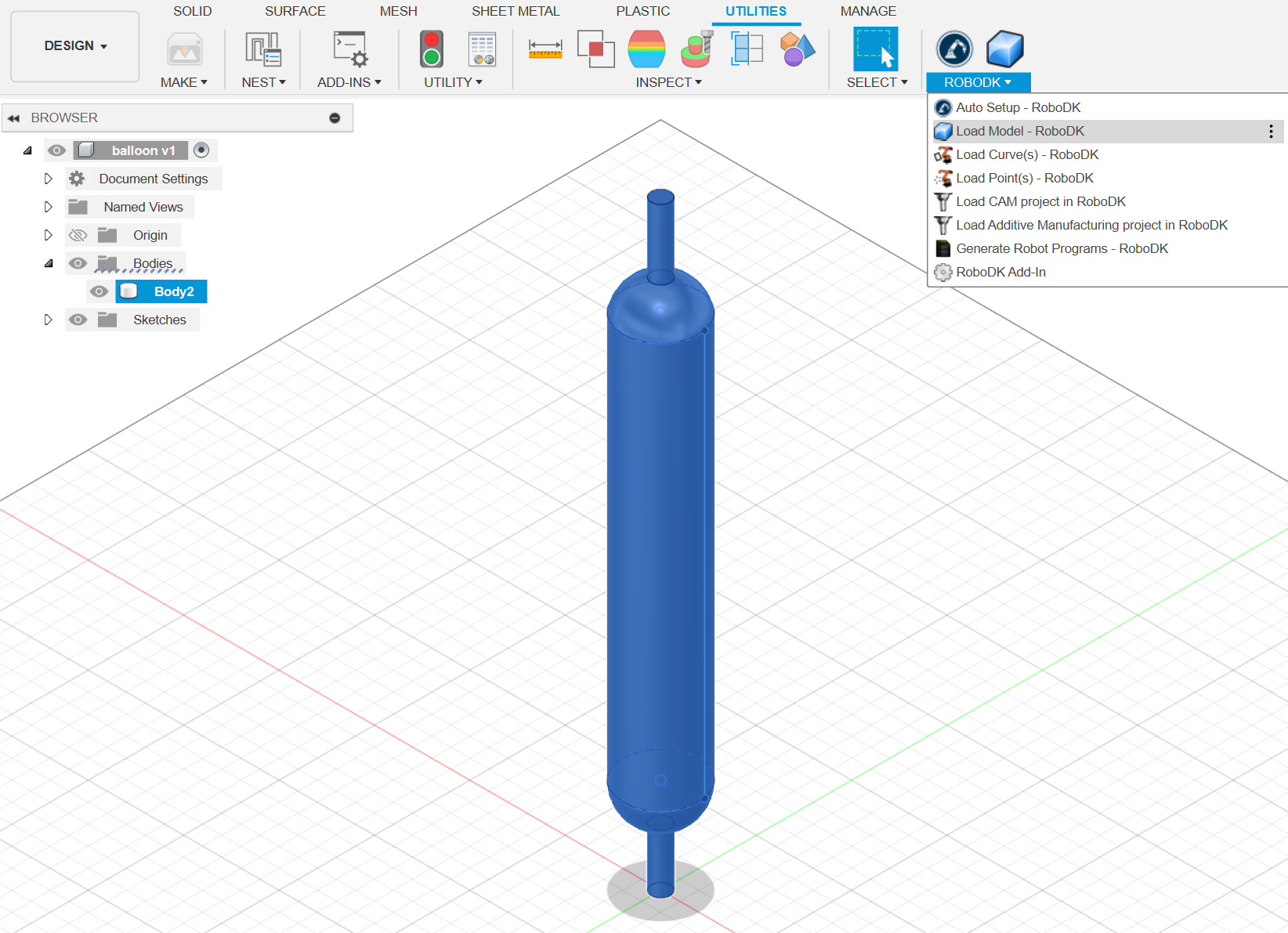
3.检查油罐模型位置,并重新命名。
导入路径
导入模型后,需要导入焊接路径。
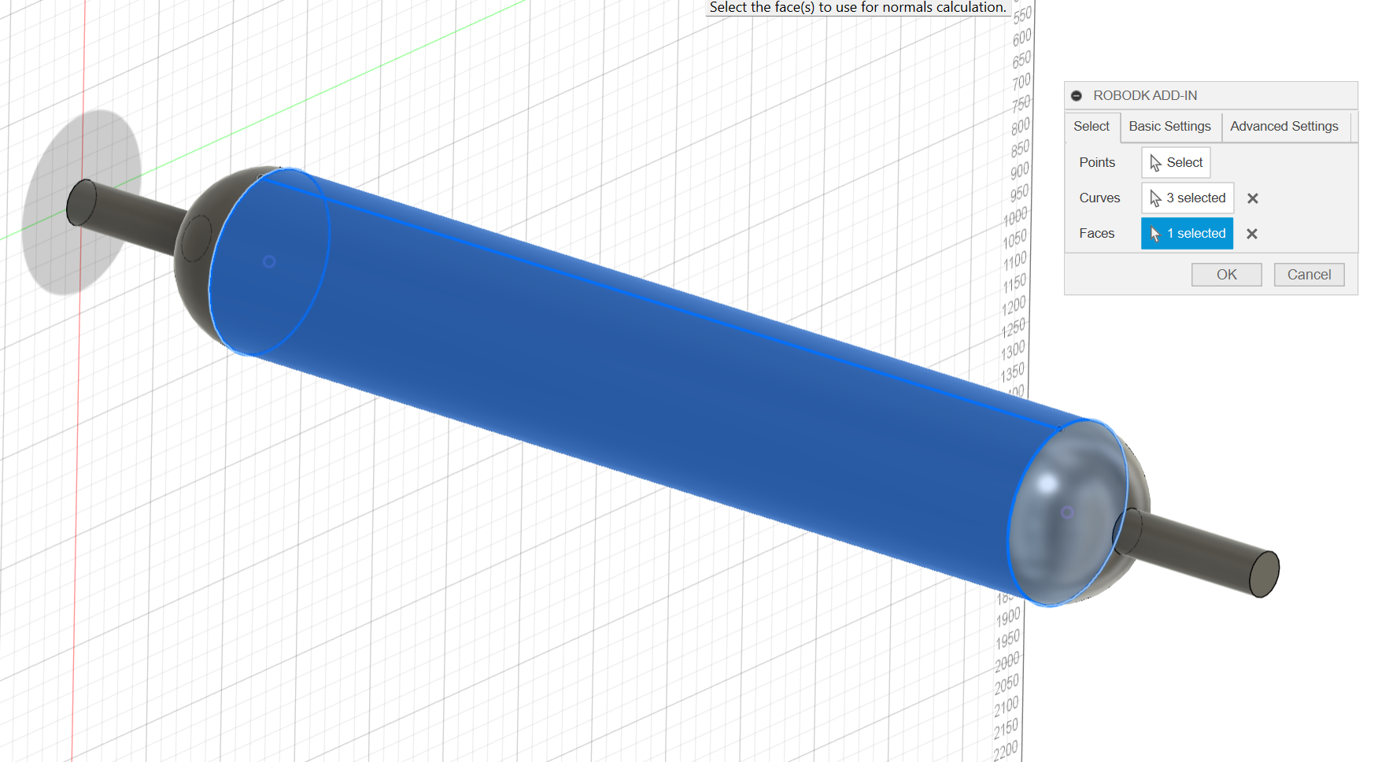
导入路径步骤:
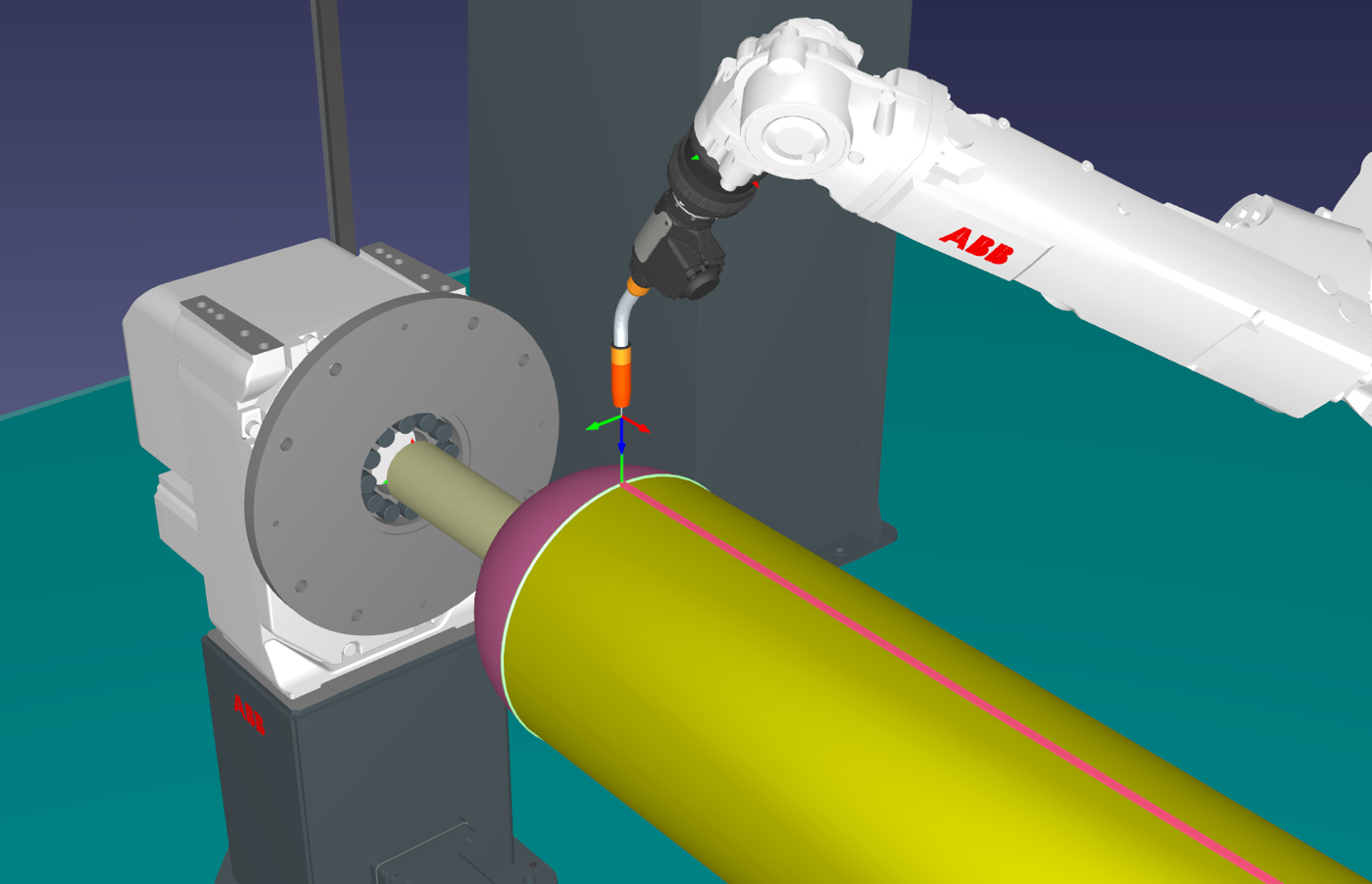
1.选择焊接路径时需同步选中相邻曲面(用于确定工具姿态)。
2.现在,你已经从Fusion 360 中导入了路径,那么可以打开RoboDK软件。
3.导入后校验路径位置并重命名。
设置曲线跟踪项目
完成基础导入后,需创建对应的曲线跟踪项目:
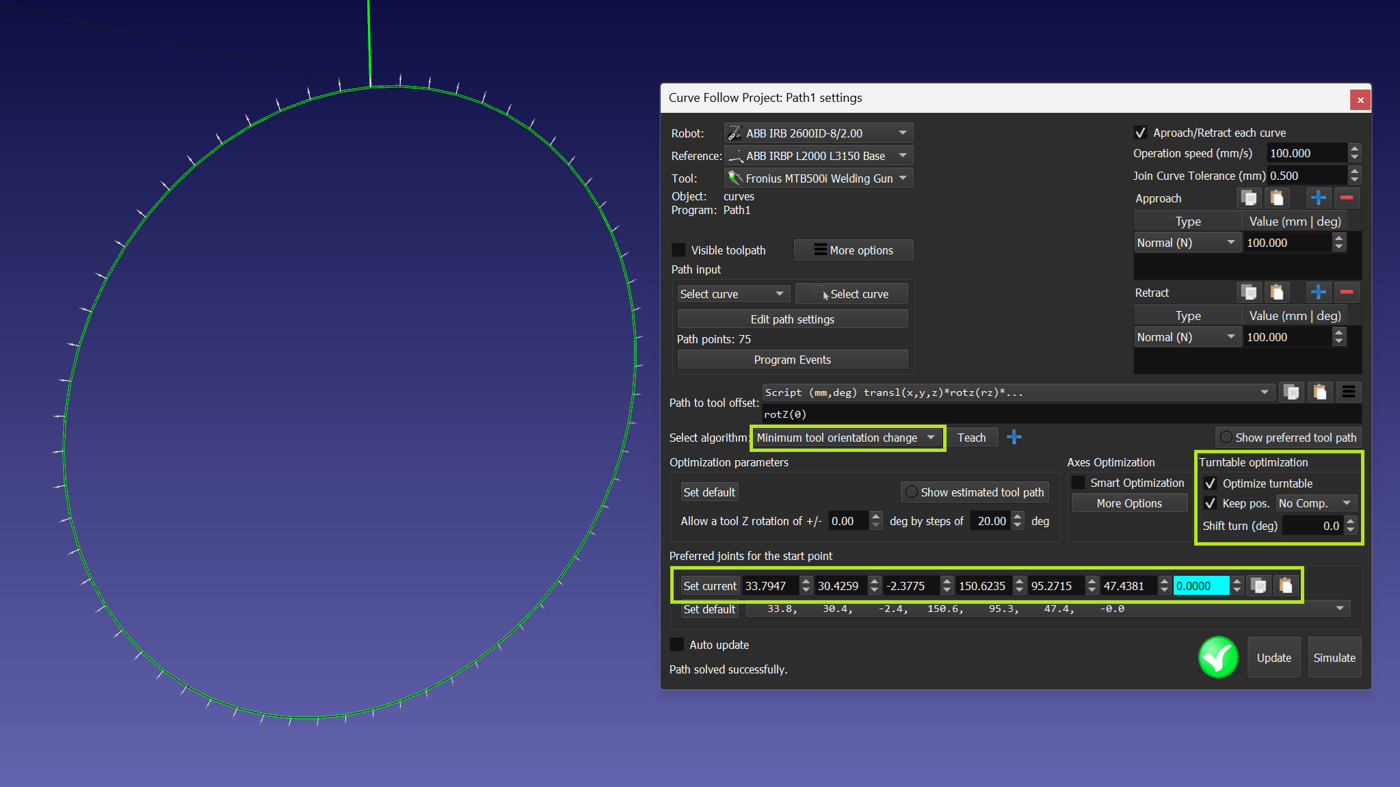
1.新建曲线跟踪项目(菜单栏:实用程序➔曲线跟踪项目)
2.选择首段环形曲线。
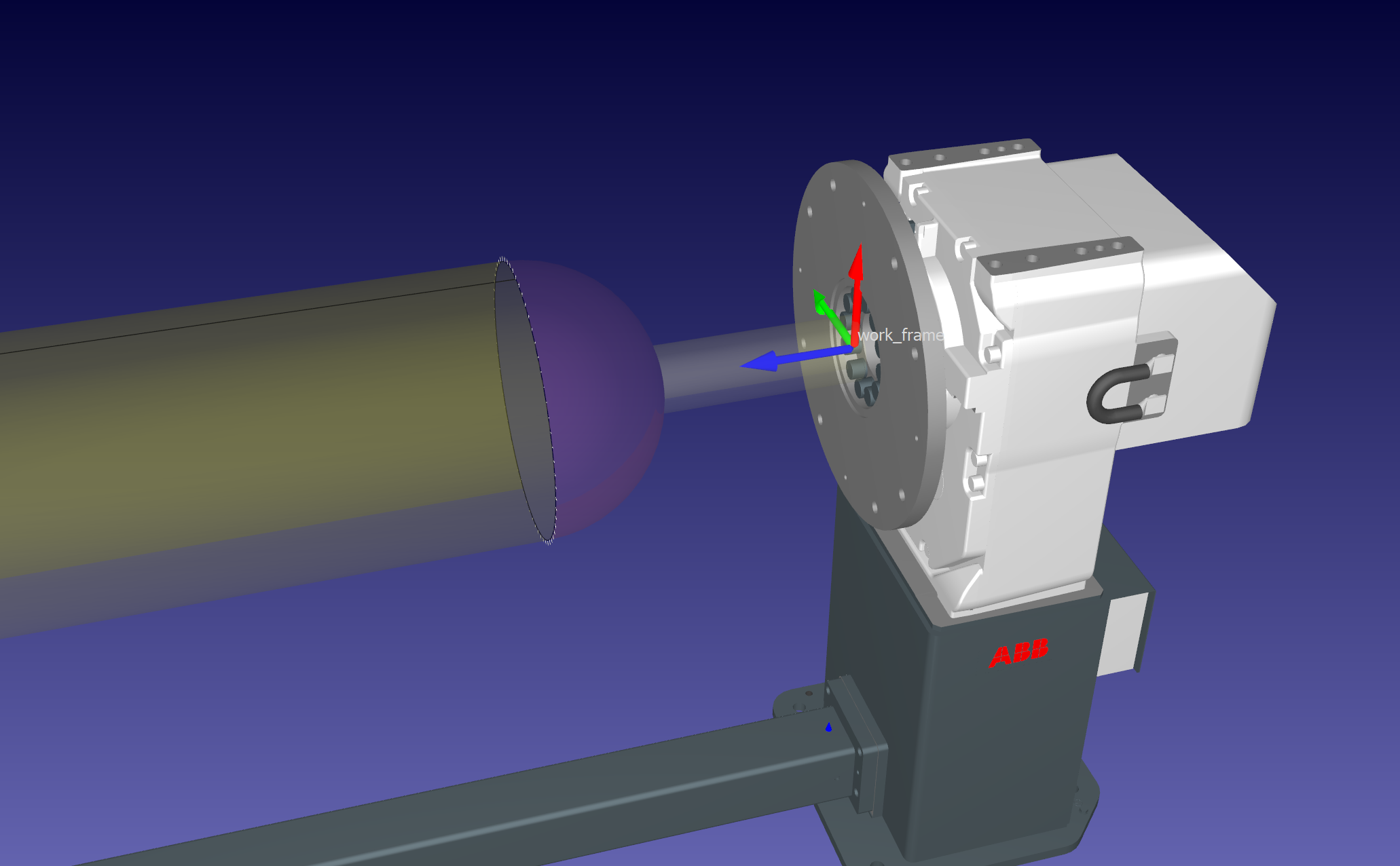
3.采用固定TCP模式(无补偿)。
4.手动设定TCP起始点与姿态
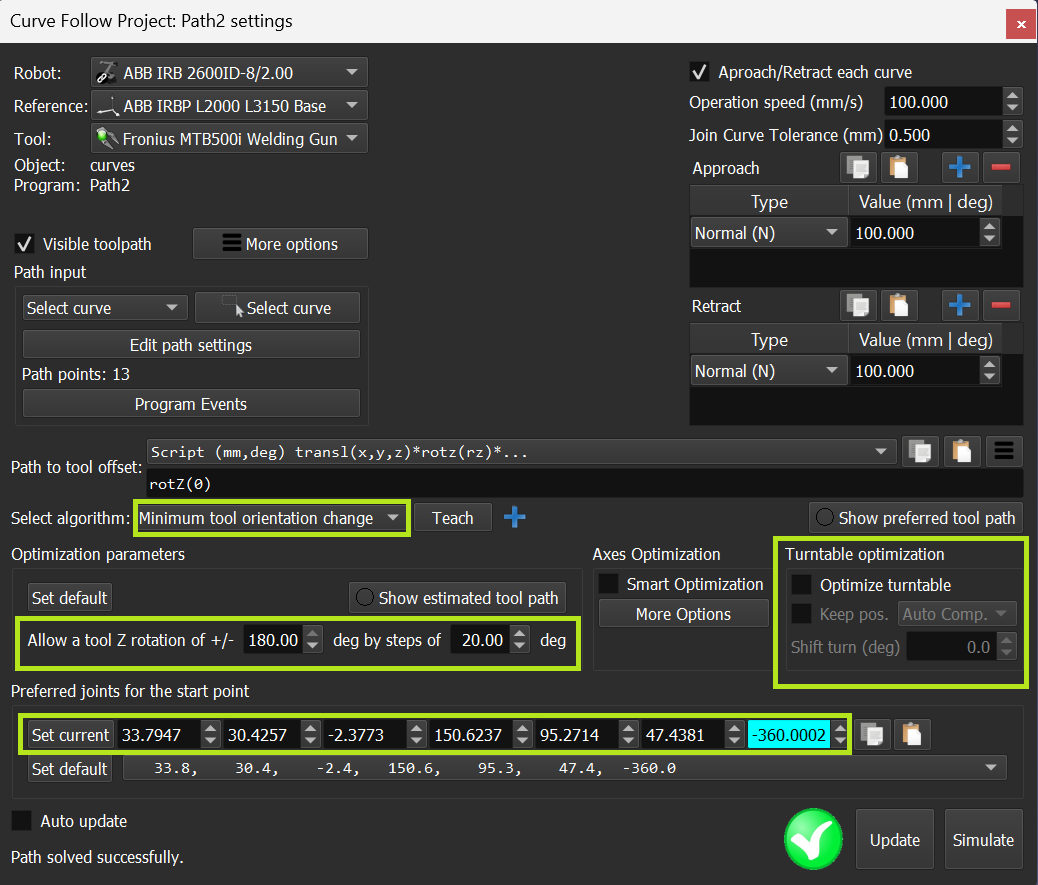
5.为直线接缝创建新的曲线追踪项目(实用工具->曲线追踪项目)。
6.排除使用定位器旋转,并明确设置前一个轨迹的终点为新轨迹的起点。
7.为第二个圆形接缝创建轨迹,使用与第一个圆形接缝相同的设置。
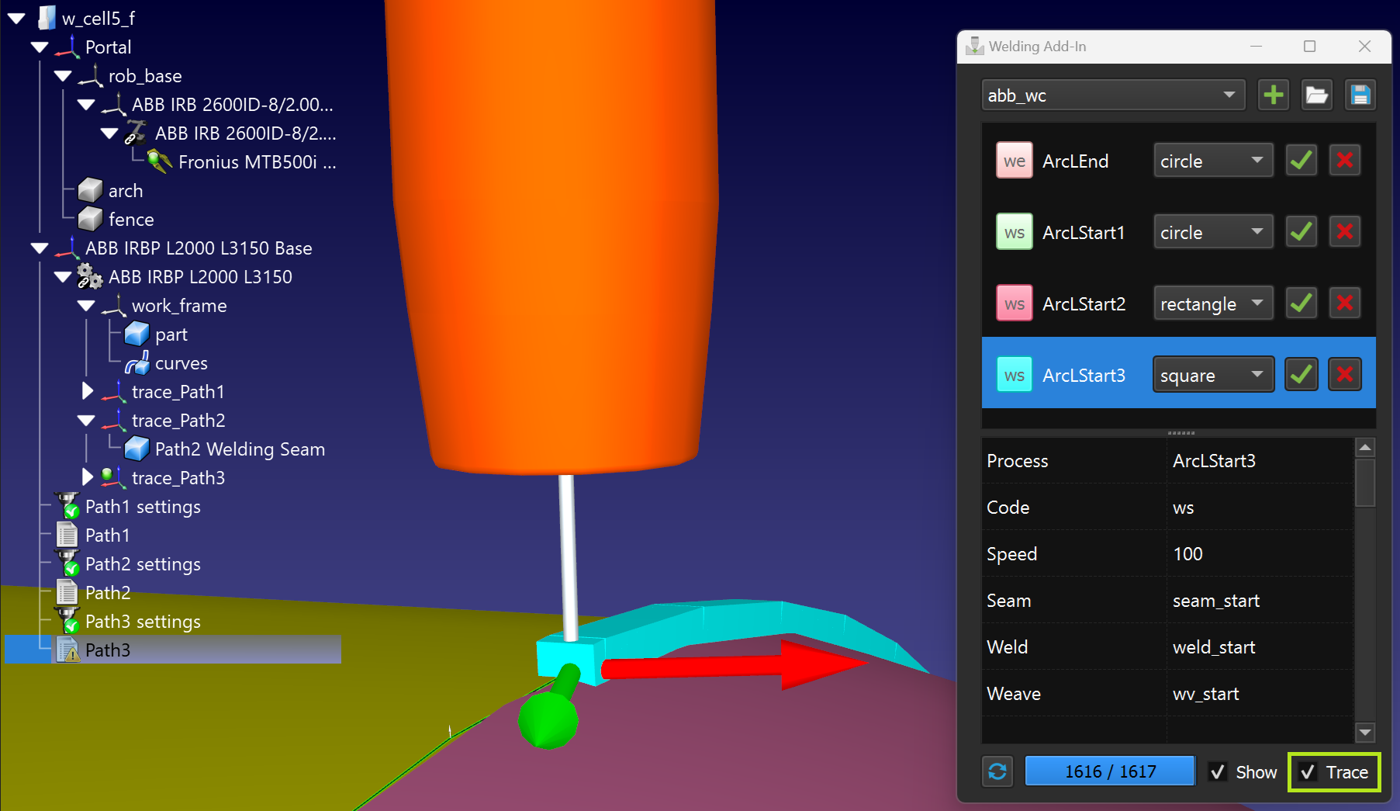
焊接插件应用
本节将指导如何通过焊接插件定制化每道焊缝工艺,采用ABB机器人专用指令模板:
1.启动焊接插件并逐项添加所需焊接模式。
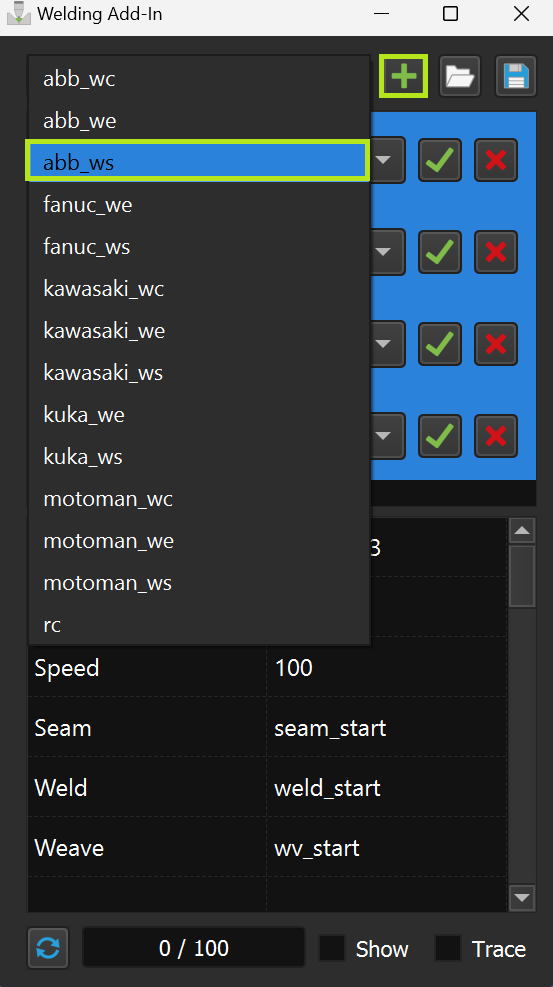
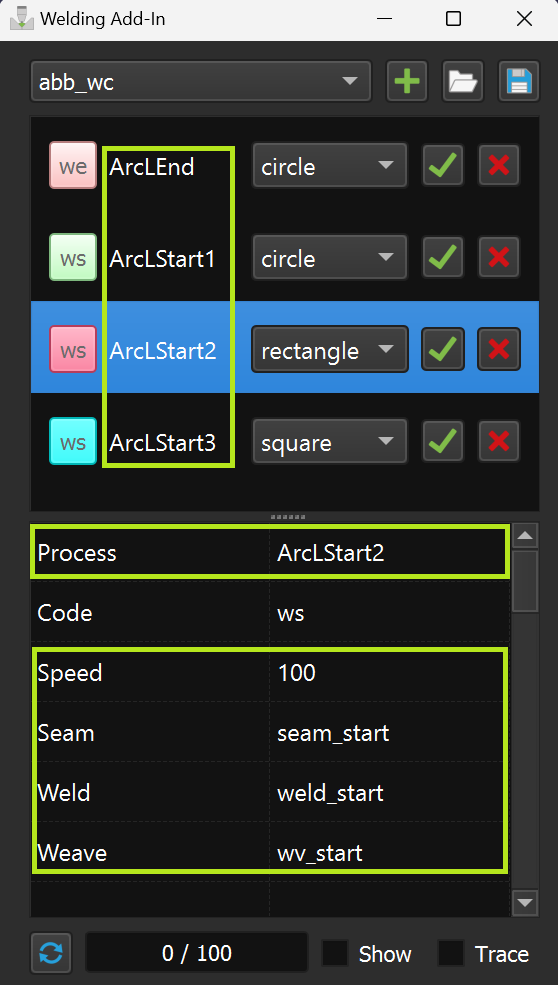
2.更改模式名称,因为它们应该是不同的,并设置参数。
3.差异化命名各模式并设置参数。
4.为每个曲线追踪项目选择并应用焊接开始和焊接结束的指令(使用Ctrl 按钮)。
请注意下面截图中的选择顺序。
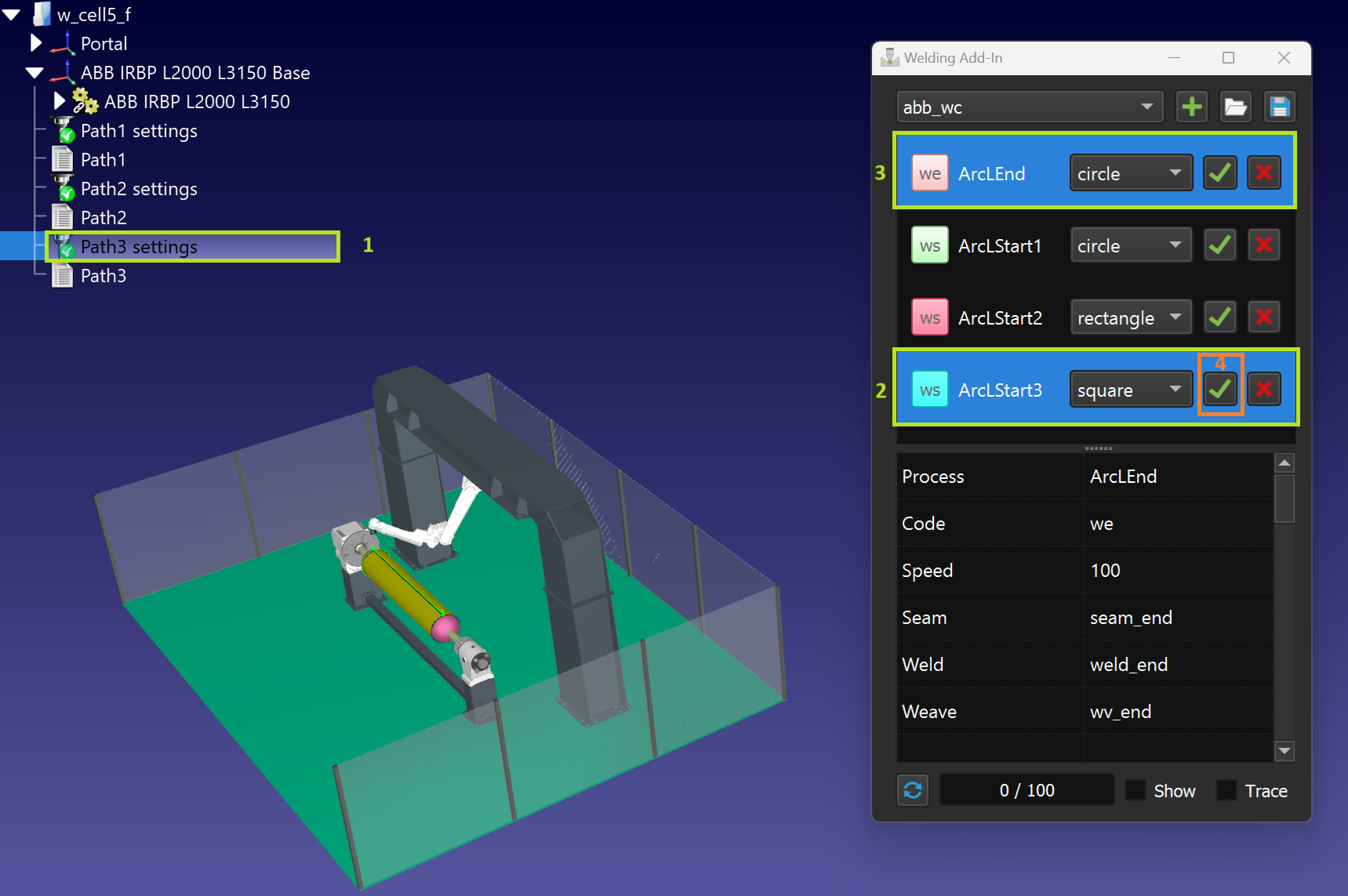
5.选定目标曲线跟踪项目后按Ctrl+U刷新
6.你可以为焊接轨迹创建一个可视化界面。
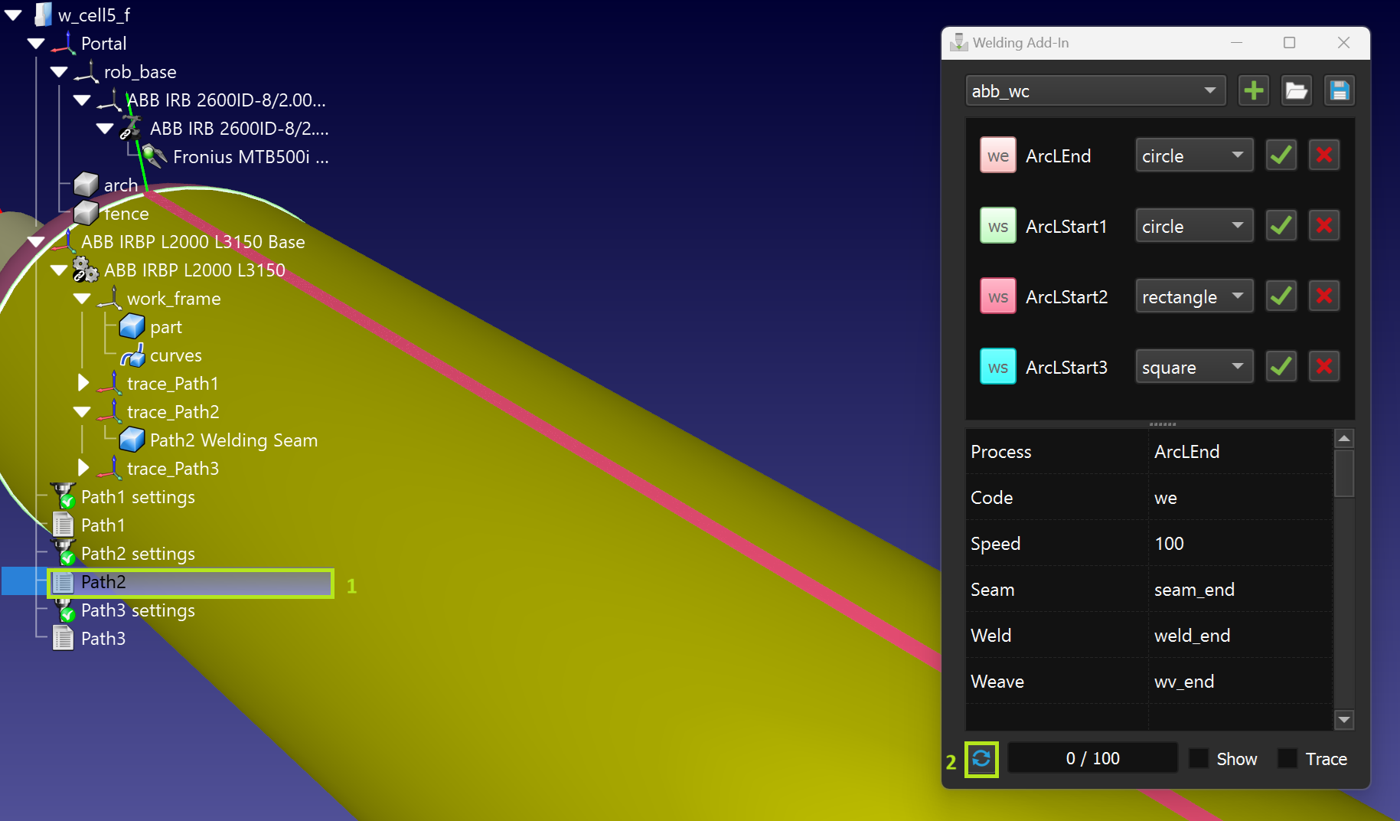
7.使用跟踪复选框可评估程序执行时焊接材料的应用情况。
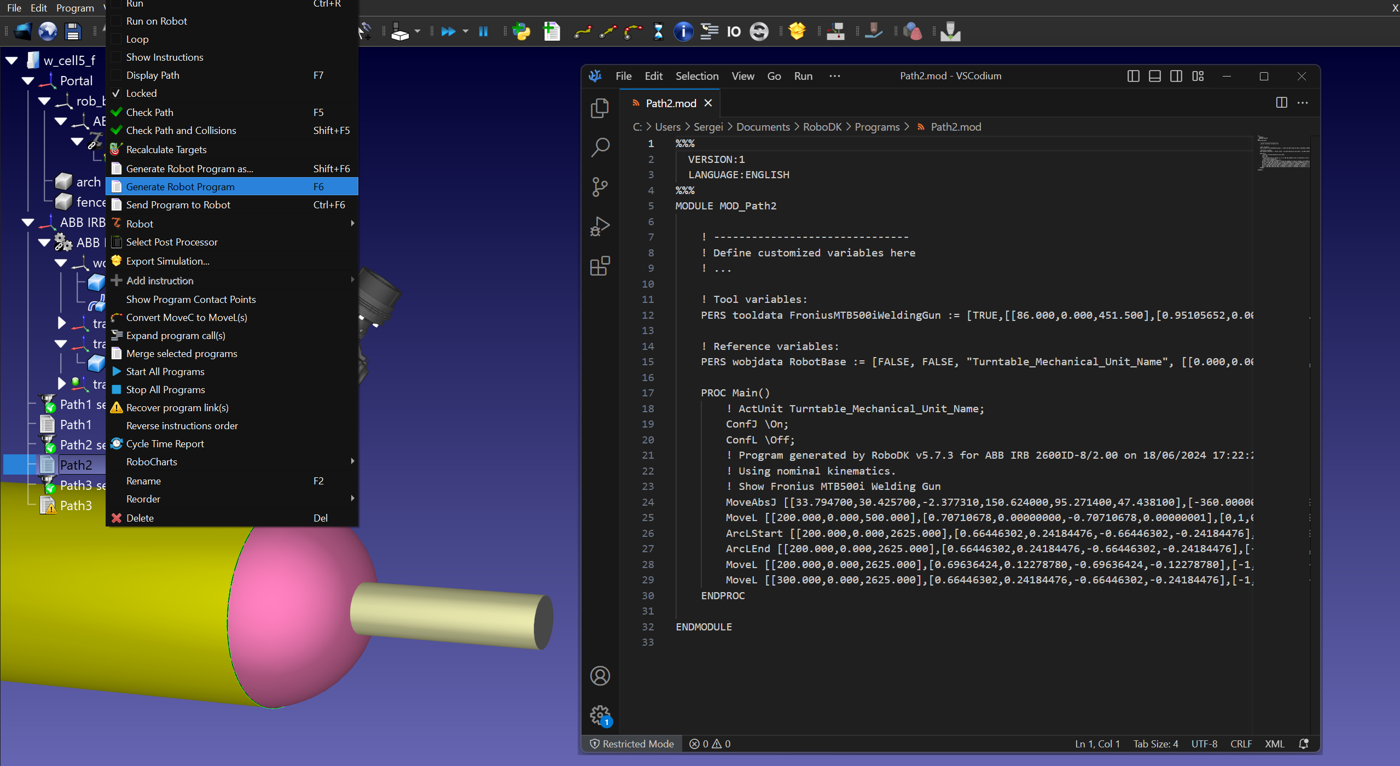
生成程序
选择合适的后处理器,校验含焊接指令的生成程序: