用户界面
可通过两种方式调用File Manager:连接至机器人窗口或直接通过菜单中连接功能。
第一种方法在已配置管理平台并定义了每个机器人的连接参数时比较方便。由于连接参数与管理平台文件一起保存,因此可以快速连接机器人。
1.右键单击工作站树中的机器人项目。
2.在右键菜单中选择:连接至机器人...,打开连接至机器人窗口。
Note:也可使用 RoboDK 主菜单中:连接➔ 连接机器人。
3.填写机器人 IP、机器人端口、FTP 用户名和密码。
4.单击按钮:浏览,在菜单中选择:File Manager。
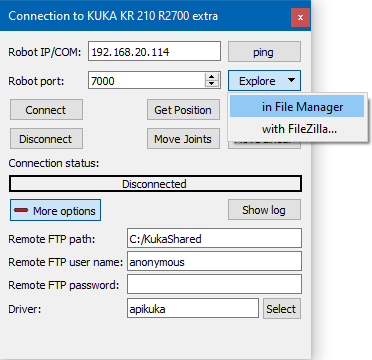
File Manager将根据驱动器名称自动确定使用哪种协议。如果为机器人定义了apikuka 或kukabridge 驱动器,则将使用 C3 Bridge Interface for KUKA 协议。在所有其他情况下,将使用 FTP 协议,并自动从连接到机器人窗口字段中读取连接详情。
第二种方法适用于需要使用特定协议通过IP地址快速连接远程系统的情况。为此,可以在菜单栏中选择:连接➔File Manager,选择所需的连接方法:

在打开的连接机器人窗口中,输入远程计算机的 IP 地址和端口。
使用File Manager
调用File Manager时,屏幕上会出现这样一个窗口:
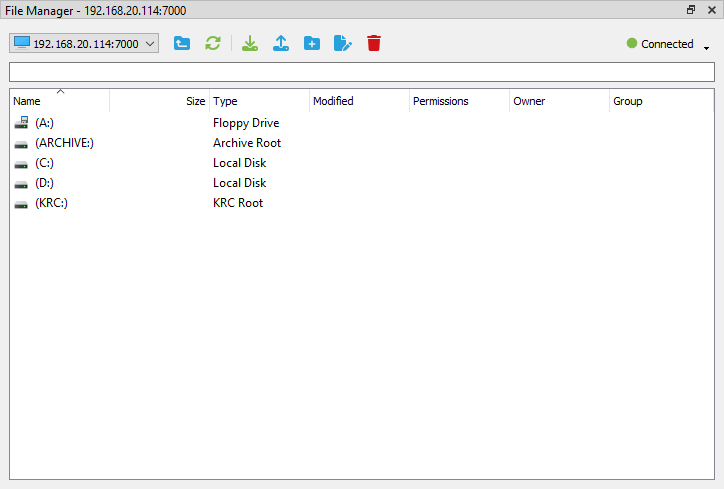
File Manager窗口顶部的标题栏显示当前的连接地址。下面是一个工具栏,可以对文件执行基本操作并监控连接状态。更下方是当前目录的路径。它可以是空的,也可以包含一个斜线字符(/),这意味着它位于文件系统的顶层。路径字段下方是File Manager的主区域,根据文件系统中的当前路径显示文件、目录或磁盘列表。File Manager面板显示文件信息时,会列出每个文件的名称、图标、大小、类型和最后修改日期。权限、所有者和组字段为可选项,可以为空。
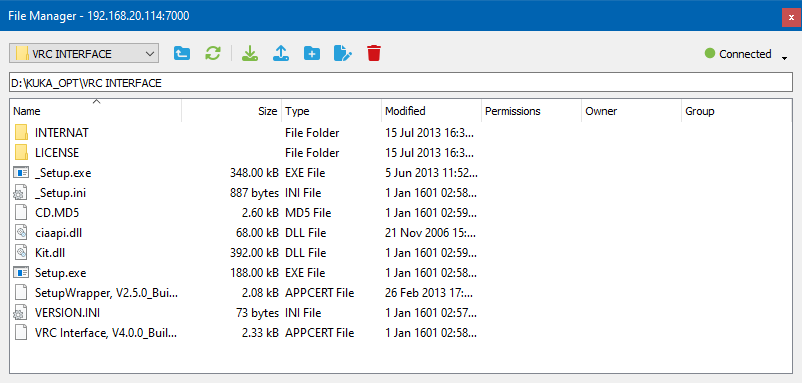
图标的外观由文件扩展名(文件名中最后一个点之后的部分)和你使用的操作系统决定。
我们来看看下工具栏的功能介绍:
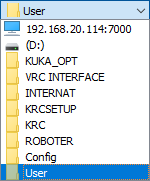
| 快速导航 | 通过下拉列表实现多级目录跳转D:\KUKA_OPT\VRCINTERFACE\INTERNAT\KRCSETUP\KRC\ROBOTER\Config\User 它包含 8 个子目录,从KUKA_OPT 开始到当前用户目录结束。从下拉列表中选择INTERNAT 目录将立即跳转到该目录(高几级)。这样可以加快文件系统的浏览速度。 |
| 向上 | 返回上级目录(若当前为根目录则刷新内容)。 |
| 刷新 | 重新加载当前目录。 |
| 下载 | 将选定文件从远程系统下载至本地(存在重名文件时将覆盖)。 |
| 上传 | 从本地上传文件至远程当前目录(根据协议不同可能覆盖或报错)。 |
| 新建文件夹 | 在远程当前目录创建新文件夹(重名时操作失败)。 |
| 重新名 | 修改选定文件/目录名称(部分协议不支持此功能)。 |
| 删除 | 移除选定项(非空目录的删除能力取决于服务端实现)。 |







连接状态指示器(工具栏最右侧):
| 连接 | 发起新连接。 |
| 断开 | 终止当前连接。 |
| 已连接 | 连接已成功建立,正常操作状态。 |
| 连接中/重连中 | 正在建立连接。 |
| 工作中 | 执行耗时操作(如目录查询/文件传输)。 |
| 已断开 | 连接终止。 |






当远程系统需要验证时,将弹出凭证输入窗口。
点击Log on按钮后,系统会尝试用新凭证重新连接
限制
目前,File Manager还存在一些功能上的限制,以下功能将在未来版本中实现:
1.不支持拖放操作
2.不支持批量文件传输
3.库卡(Kuka)协议不支持重命名
4.部分非标准FTP实现可能存在兼容性问题