优化外部轴运动
当机器人同步了一个或多个外部轴时,你可优先驱动特定轴,并根据优化标准调整机器人加工、曲线/点跟踪及3D打印项目的运动策略。
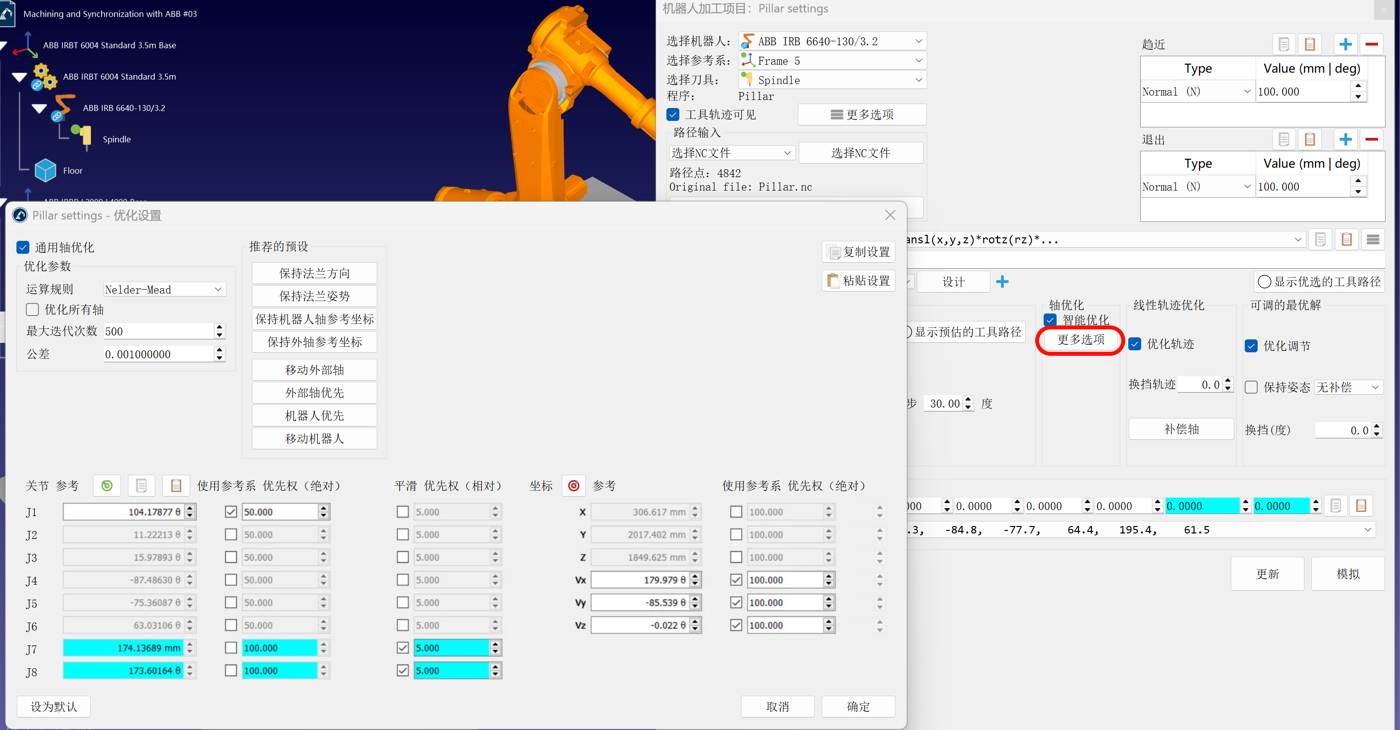
在机器人加工项目窗口有一个“轴优化” 模块,点击“更多选项”,即可配置外部轴优化参数。你可基于以下准则设置优先级:
你可以根据以下标准提供不同的优先级:
●保持参考关节位置:为部分(或全部)关节设定目标位置。权重越高,程序运行中越倾向于匹配该参考值。
●最小化运动(匹配上一位置):对特定轴的突变运动施加“惩罚”(相对运动优化)。
●保持参考姿态:设定机器人需维持的绝对法兰姿态(参考姿态为相对于静态基座的法兰位姿)。系统将根据参考姿态的X/Y/Z向量调整法兰朝向。
例如,选择“保持法兰朝向”预设时,RoboDK会优先维持法兰姿态与当前仿真中的机器人位姿一致(选择此预设将自动更新参考姿态)。若需让机器人关节1始终接近105度,可启用此优先级。
如果选择“保持机器人轴参考位姿”预设时,系统会更新位置参考值以匹配当前轴状态。此时机器人关节默认权重为100(高优先级),而外部轴权重为0(无偏好),但外部轴仍会保留权重5以避免突跳运动。
调整参数后,更新机器人加工项目即可生效。
Tip:若需完全锁定某轴运动,可输入极高权重(如100000)。
Note:此菜单不控制路径中的机器人位姿,仅优化路径各点位的外部轴位置。若使用转台,应通过 “转台优化”选项控制工具相对于运动参考系的姿态。