校准
按照以下校准2轴转台:
1.在菜单栏中选择:实用程序➔
2.选中要定义的参考坐标系。
或者,右键单击参考坐标系,选择
3.选择方法:转台校准(2 轴)
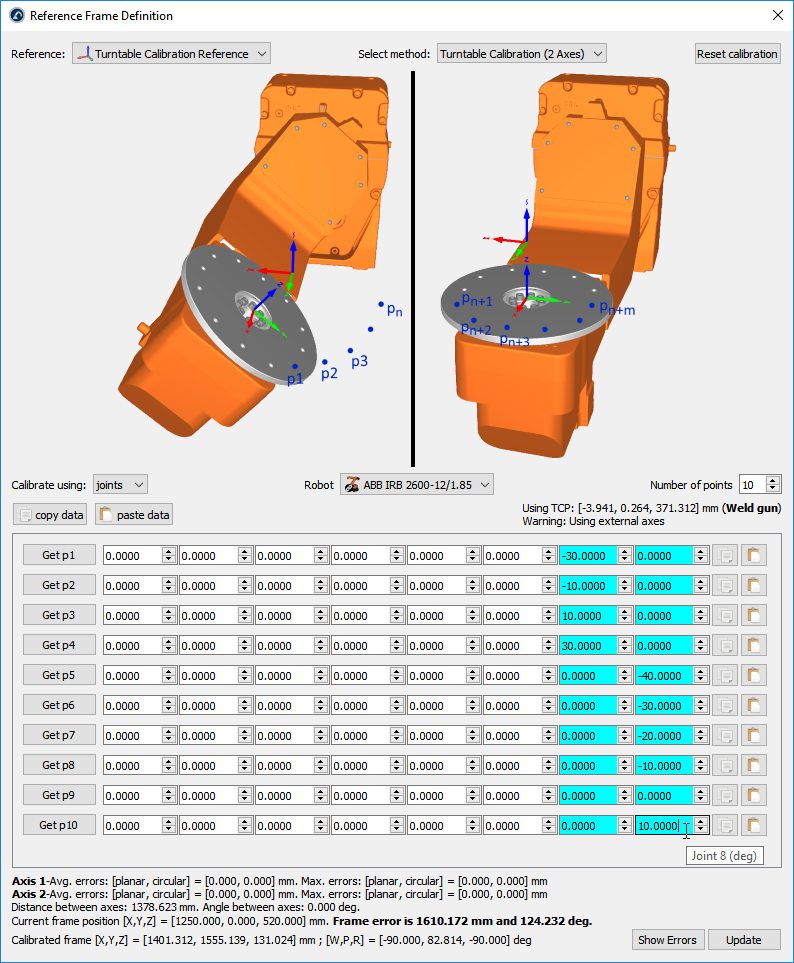
4.默认的校准使用:关节。若已有各点相对于机器人基坐标系的XYZ坐标,可将校准使用切换为:点位。
5.若项目中有多台机器人,需要选择一个机器人。
6.选择你想要的点数(最低要求为 6 点:每个轴 3 点)。
Important:在移动转台时,应与机器人一起探测转台的同一点。转台需要在每个轴的正向旋转中移动。应先移动轴 1,然后移动轴 2(如上图所示)。建议至少使用12 到 20 个点,以便更好地了解移动转台时的误差。
Note:用于标识轴1 的点数不必与标识轴 2 的点数一致(例如,可以用 4 个点标识轴 1,用 6 个点标识轴 2)。
Important:校准基准的 Z 轴将与轴 2 一致,校准基准的 X 轴将与公共法线一致。此外,校准基准的原点将位于轴 2 和公共法线的交点(轴 2 上最靠近轴 1 的点)。
7.开始用机器人关节位置(或点)填充台面。
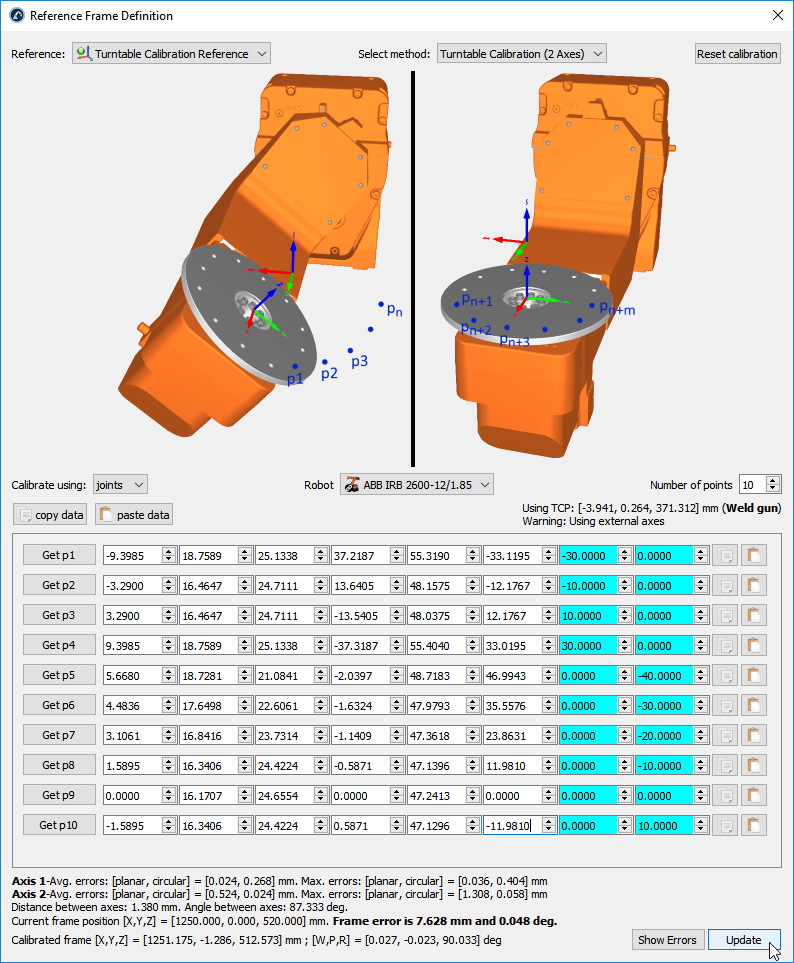
Tip:配置列表可以手动填写,也可以使用复制/粘贴按钮(关节值右侧的按钮)填写。
Tip:如果你已与机器人连接,可以选择 "Get p"(获取 p点)按钮,直接从机器人上获取机器人关节。有关设置的更多信息详见机器人驱动章节。并非所有机器人都可使用此选项,可能需要机器人增材制造厂商出售的附加软件选件。
Important:如果手动输入数值,建议每个关节值至少包含 4 位小数(提供关节值时)。可以在工具➔选项➔精度➔最大小数中更换允许的小数位数。
Note:选择更新后,RoboDK 将在 RDK 工作站中保留一份所提供数据的副本。
8.最后点击:更新,将新位置应用到 RoboDK 站中选择的参考坐标系。
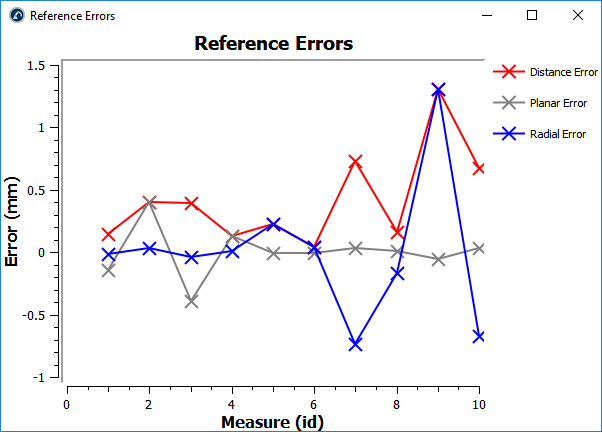
9.选择显示误差,以显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)。