定义参考坐标系
参考坐标系用于定义物体相对于机器人的位置和姿态。在机器人程序中基于参考坐标系示教目标点,这样可以在调整或移动程序位置时,无需重新示教所有目标点。
更多有关参考坐标系的信息详见参考坐标系章节。
定义参考坐标系需要使用机器人工具(TCP)探测若干点,并记录相应的关节值(或外部测量系统的坐标)。
Important:必须先正确定义TCP(除非使用外部测量系统获取的点),因为参考坐标系的校准依赖于机器人运动学模型。如果TCP校准存在误差,这些误差会传递到参考坐标系的校准结果中。
Note:也可以使用激光跟踪仪等外部测量设备完成参考坐标系的定义。
定义参考坐标系的步骤如下:
1.在菜单栏选择:实用程序➔
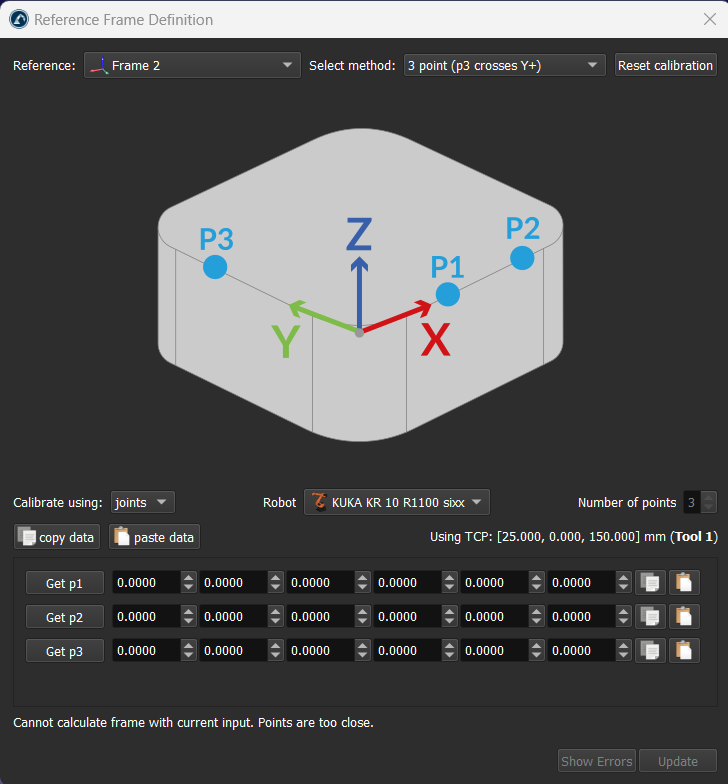
2.在参考坐标系的定义窗口下拉选择你需要校准的坐标系:选择参考坐标系。
或者,右键单击参考坐标系,选择
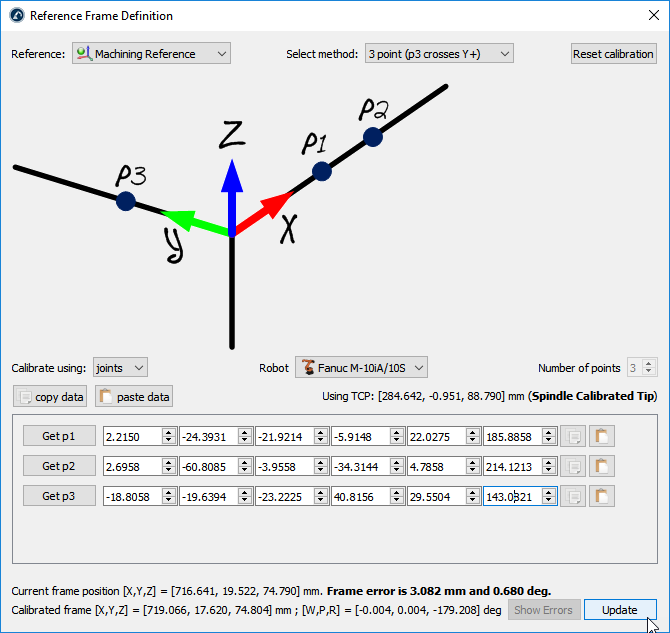
3.选择方法:
a.3点法(第3点位于Y轴正向)
b.3点法(第1点位于坐标系原点)
c.6点法(更高精度)
d.转台校准:用于校准转台上的参考坐标系,确保转台轴线对齐。
Note:机器人控制器通常允许通过示教器上列出的三点来定义坐标系。
4.默认的校准使用:关节。若已有各点相对于机器人基坐标系的XYZ坐标,可将校准使用切换为:点位。
6.在表格中填入测量点数据(关节值或XYZ坐标)。
7.最后,选择 "更新",这样就可以应用新的参考坐标系。
Tip:配置列表可手动填写数据,或使用右侧的复制/粘贴按钮快速输入。
Video:这段视频展示了如何使用欧姆龙TM机器人校准坐标系:https://www.youtube.com/watch?v=WmyIAgNyPC0&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=3
Tip:如果已与机器人连接,可以选择"Get p"(获取 p点)按钮,直接从机器人上获取机器人关节。更多信息详见机器人驱动章节。并非所有机器人都可使用此选项,可能需要机器人增材制造厂商出售的附加软件选件。
Important:提供关节值时建议保留至少4位小数,修改位置:工具➔选项➔精度➔程序生成的小数位。
Note:选择“更新”后,RoboDK 将在工作站中保留副本数据。
Note:校准完成后,RoboDK会自动计算参考坐标系,并保存输入数据至RDK文件。
物体对齐坐标系
本节介绍如何根据物体自身的几何特征对齐其参考坐标系(即调整坐标系位置和方向),使其与真实场景中的实际位置匹配。
Note:如果物体的参考坐标系已位于机器人TCP可探测的位置,则无需执行此流程。
操作步骤:
1.导入3D物体模型到工作站内。
2.选中
3.选择程序➔
确保后续参考坐标系是归属在根目录下。
4.右键点击:参考坐标系,在菜单中选择
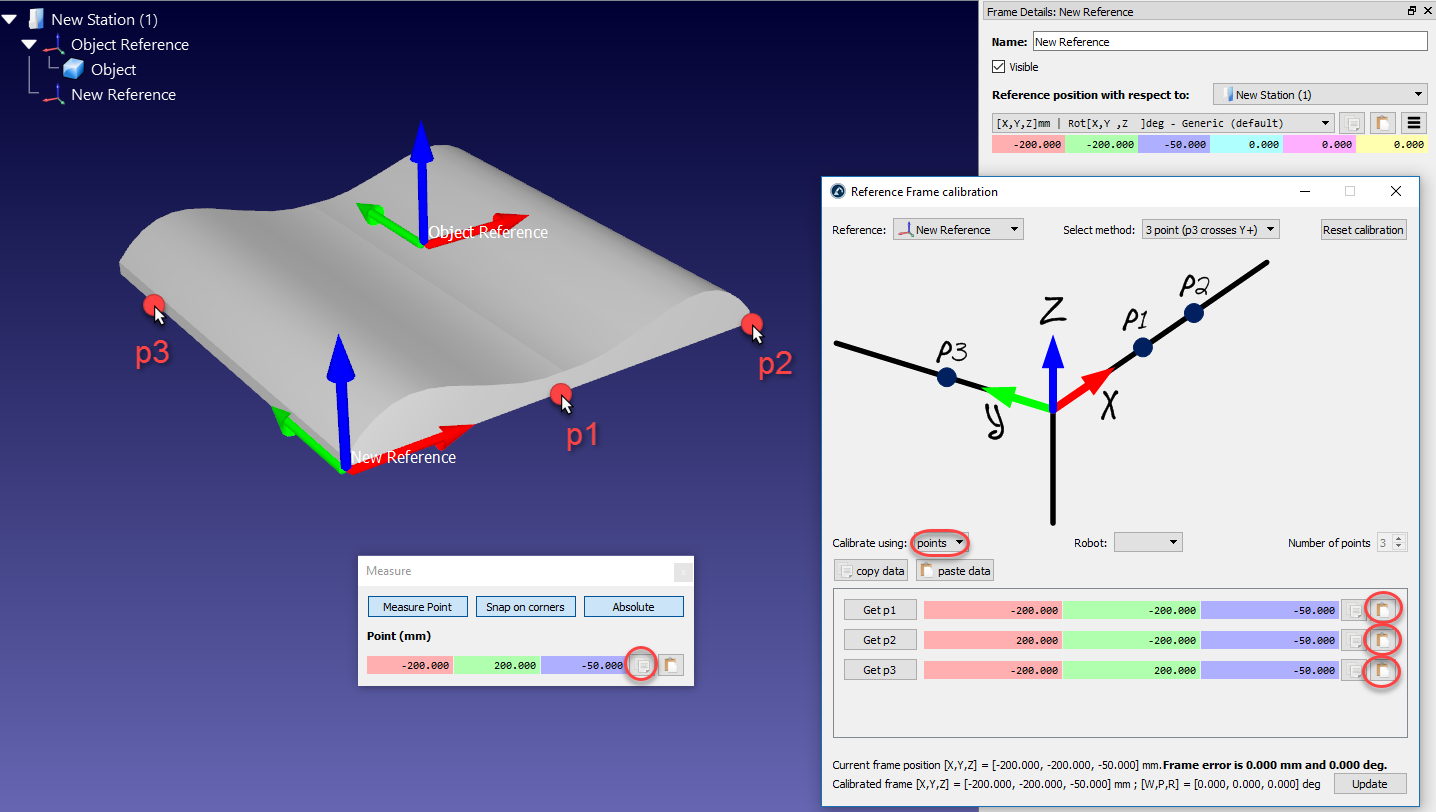
流程与前一节定义参考系类似,但需选择虚拟物体上的几何点(而非真实物体上的点)。
5.选择校准方法。
例如选择:3点(P3指向Y+)。
6.在参考坐标系的定义窗口,校准使用下拉选择:点位。
7.在主菜单中选择工具➔ 测量,打开测量工具。
8.在测量工具中打开"绝对"按钮,确保点位基于工作站坐标系(绝对基准)测量。
9.在物体上选择3 个点,并将其输入参考坐标系的定义窗口。
Tip:你可以使用复制/粘贴按钮,简化输入XYZ坐标的数值。
10.选择更新。参考坐标系将自动定位至目标位置。
11.右键点物体,选择:改变坐标系(按住Shift+拖动)。然后选择New Reference。物体绝对位置不变,但其相对于新坐标系的相对位置将被明确定义。
12.将新参考坐标系拖放至机器人基准坐标系下,即可开始离线编程操作。
Important:必须将参考坐标系直接连接到站点根部,以便我们能够使用测量工具进行绝对测量。
Tip:在一侧新建一个工作站点击:文件➔新建工作站,并单独将对象与参考坐标系对齐可能更容易。然后,仅将对象复制/粘贴到主RoboDK工作站中。
机器人对齐坐标系
本节介绍如何通过共享同一参考坐标系,实现多台机器人的离线协同编程。
在典型的离线编程应用中,物体位置通常基于单台机器人坐标系进行调整。但当多台机器人协同作业时,必须将所有机器人坐标系统一到同一参考基准(如工具坐标系或公共参考系)。
对齐多台机器人参考坐标系的操作步骤:
1.确保各机器人参考系与工具参考系独立。若存在依赖关系,需将所有参考系拖拽到根工作站下方。
2.为每台机器人基坐标系添加新参考系(比如Real Ref. A 和 Real Ref.B),用于表示工具相对于各机器人的实际位置。
3.分别校准这些参考系(使用校准参考系校准流程,例如3点法)
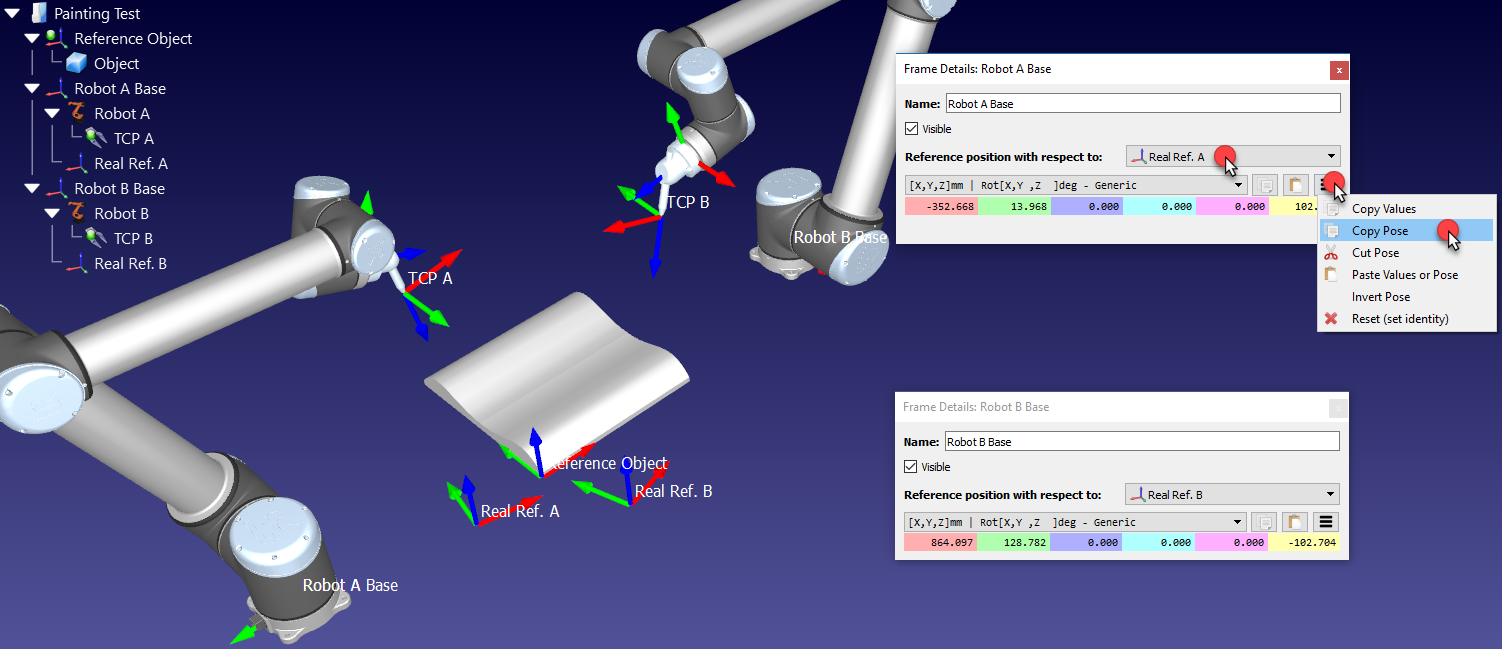
此时会看到三个参考系(工具参考系、机器人A或B真实参考系)本应重合,但因校准误差未对齐:
4.双击机器人基坐标系(如Robot A Base),打开参考系坐标详情窗口。
5.复制该机器人基坐标系相对于其真实参考系(Real Ref. A)的姿态,也可以点击复制按钮。
6.继续在该窗口中,将参考系的位置相对于选择为Reference Object参考系。
7.粘贴复制的坐标值。机器人基坐标系将移动,使Real Ref. A与Reference Object完全重合。
8.重复步骤4-7,对齐其他机器人的参考系
完成上述步骤后,所有机器人参考系将与Reference Object匹配,确保协同作业的一致性。