定义工具
机器人工具,或称为工具中心点(TCP),用于将机器人移动到笛卡尔坐标系位置(如给定XYZWPR值的笛卡尔目标点)的基准点。TCP并不是一个独立存在的坐标系,而是通过一个变换从机器人法兰坐标系定义出来的。在任何机器人应用中,无论是否涉及离线编程,正确定义TCP都至关重要。
定义机器人工具的步骤:
1.选择实用程序➔
2.选择要定义的工具。
或者,右键单击工具,选择
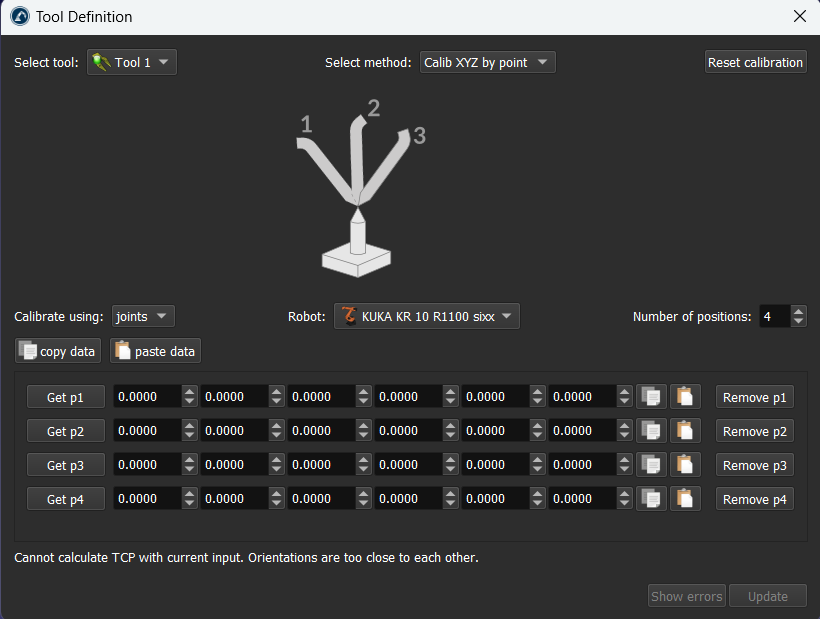
3.选择方法:
a.通过点校准XYZ:以不同姿态使TCP接触同一固定点
b.通过平面校准XYZ:使TCP接触平面(类似测头),TCP 可以是点或球体。
Note:通过不同姿态触碰同一点(第一种方法)与大多数机器人示教器内置方法相同。使用RoboDK可更直观查看TCP误差。
Note:若需计算球体中心,推荐使用平面法定义TCP。此方法会自动获取接触探针的中心。
4.默认使用关节值校准TCP。若已有笛卡尔目标数据,可切换校准使用为姿态。
Important:若通过姿态定义TCP,需提供机器人法兰相对于基坐标系或参考坐标系的位置和姿态(位姿)。有关如何提供这些值的更多信息,请参阅参考坐标系章节。
Tip:建议使用超过3-4组配置数据校准TCP,以提高精度并估算误差。高精度场景推荐8组以上数据,低精度需求可仅用3组。
5.选择目标机器人。
6.调整用于校准TCP的采样点数(后续可修改)。
7.在表格中填入测量的关节值或法兰位姿数据。
8.最后点击 “更新”, 应用新工具坐标系至RoboDK工作站。
Video:这段视频展示了如何使用欧姆龙TM 机器人校准机器人工具 (TCP):https://www.youtube.com/watch?v=TM-9vGR2r4k&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=2。
Tip:配置列表可通过右侧按钮手动填写或复制/粘贴数据。
Important: 提供关节值时建议保留至少4位小数(可在菜单栏:工具➔选项➔精度➔程序生成的小数位修改)。
Tip:若已设置机器人驱动,可通过 Get p1 按钮直接从真实机器人获取当前关节值至RoboDK。更多信息详见机器人驱动章节。
Important:建议保存所提供的数值的单独副本。选择 "复制数据 "和 "粘贴数据 "可复制/粘贴所有内容。
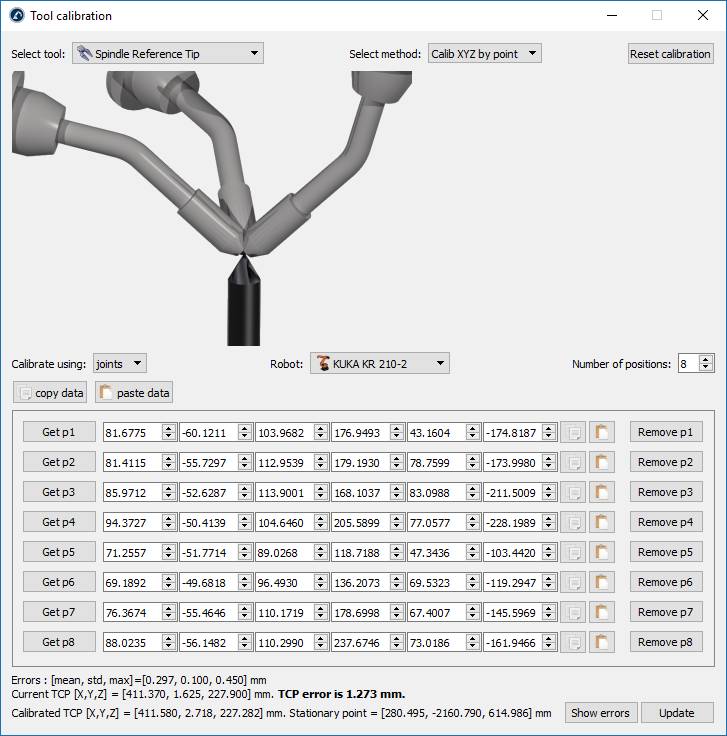
Note:输入数据后,新工具(TCP)会自动计算生成。
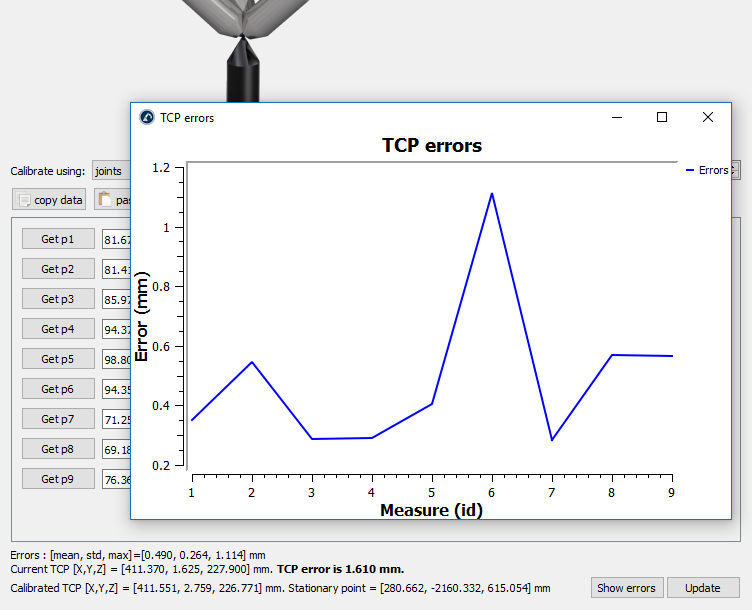
Tip:界面会显示平均误差、方差(std)和最大误差。点击“显示误差”可查看各采样点相对于平均值的误差分布图。手动操作易引入异常误差点,可通过 “删除pX” 按钮删除明显偏离平均值的点(例如图中删除第6点后误差改善)。
例如,下图显示了选择删除p6 按钮删除点 6 之前的错误。