如何将机器人关节耦合在一起
有些机器人的两个关节耦合在一起,这意味着机器人的两个关节是相依的。例如,发那科(Fanuc)机器人的关节 2 和关节 3 联在一起。
请按照以下步骤在 RoboDK 中连接机器人的关节:
1.首先,双击机器人,打开机器人面板。
2.点击机器人名称旁"参数"选项卡。
3.勾选解锁高级选项。
4.在机器人参数窗口,点击关节方向,此时会打开关节轴方向的选项卡。前6个数值代表关节的旋转方向,最后一个数值是关节2和3的耦合。将第7个数值改为-1以连接关节。此时会弹出一个带有耦合关节限制多边形的新选项卡,你可以编辑这些限制,以防止机器人发生自碰撞。
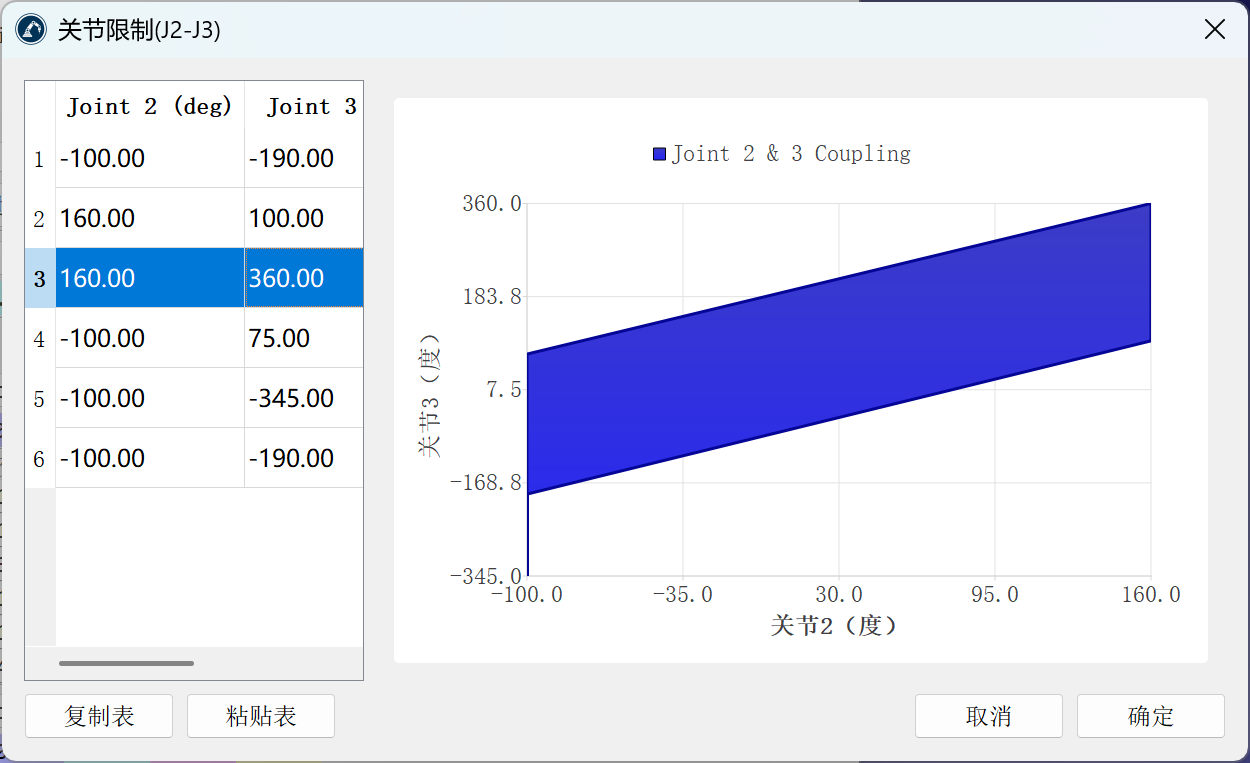
Note:耦合关节将使关节2和3一起移动,将值改为1而不是-1将反转关节的耦合方向。