如何建模
本节介绍如何对单轴线性轨道(也称线性轴或线性轨道)进行建模。线性轨道有助于扩展机器人手臂的触及范围。
Video:如何制作单轴直线导轨:https://www.youtube.com/watch?v=KTRDmHTOy0M
按照以下步骤导入 3D 模型:
1.在 RoboDK 中拖放 3D 模型,将物体导入工作站(可接受的文件格式包括 STEP、IGES 或 STL 等常见 3D 格式)。
请按照以下步骤打开机械结构生成器:
2.选择实用程序➔ 建模结构或机器人。
3.在下拉选项中选择:1 个移动轴。
4.如果3D模型是组合在一块的,你可以在 RoboDK 中拆分模型。
Note:要将物体分成两块,并更改模型的颜色,可以按照六轴机器人的建模步骤进行。
按照以下步骤定位机器人基坐标系:
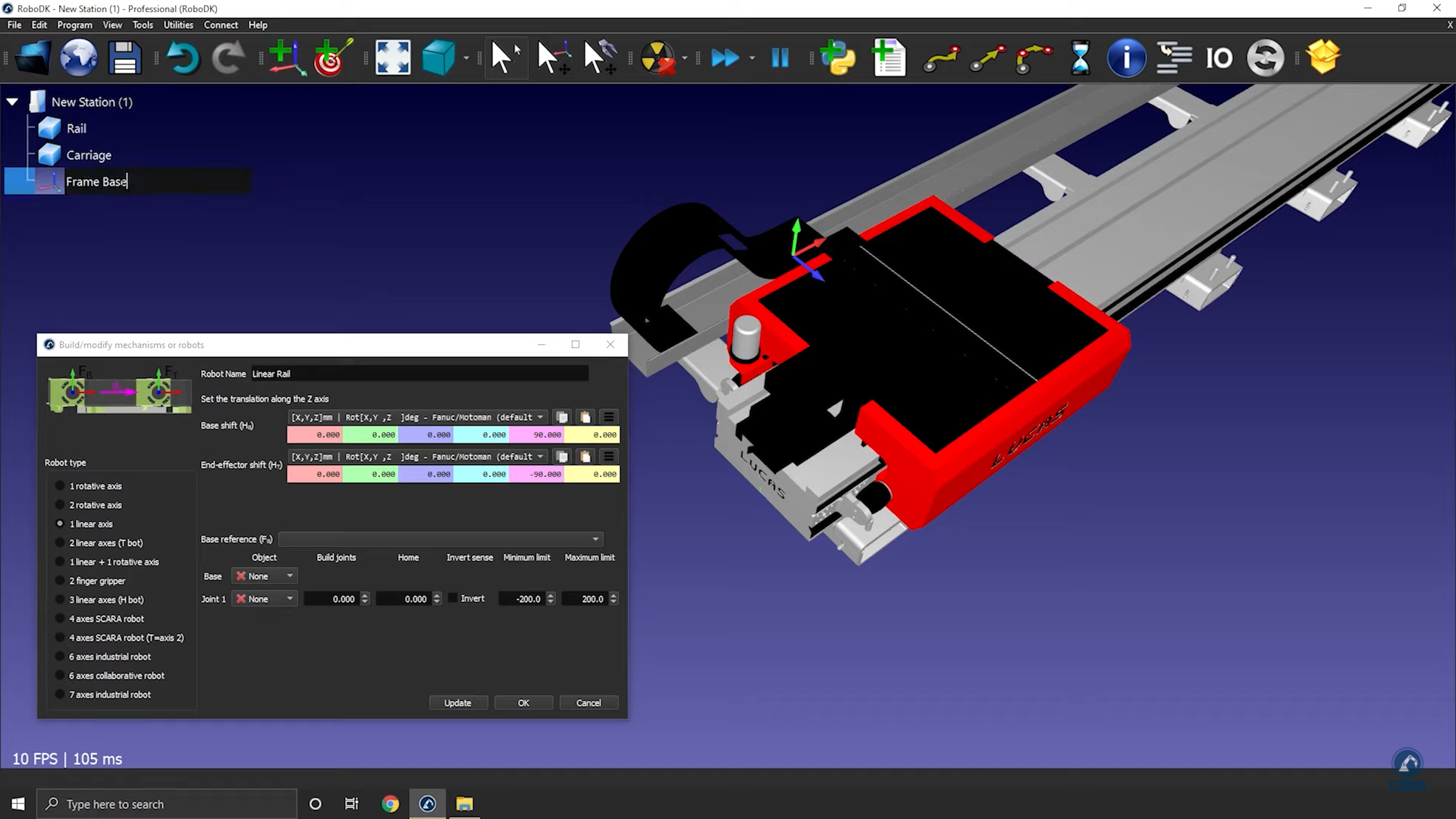
5.现在你已经加载了物体,再次打开模型机械结构生成器通过:实用程序➔建模结构或机器人。
6.你可以在该窗口的名称位置为机械结构重新命名。
7.考虑将基坐标系置于导轨的0位置:在此处创建一个参考坐标系,并将其命名为 "Frame Base"。
按照以下步骤调整基坐标系的位置:
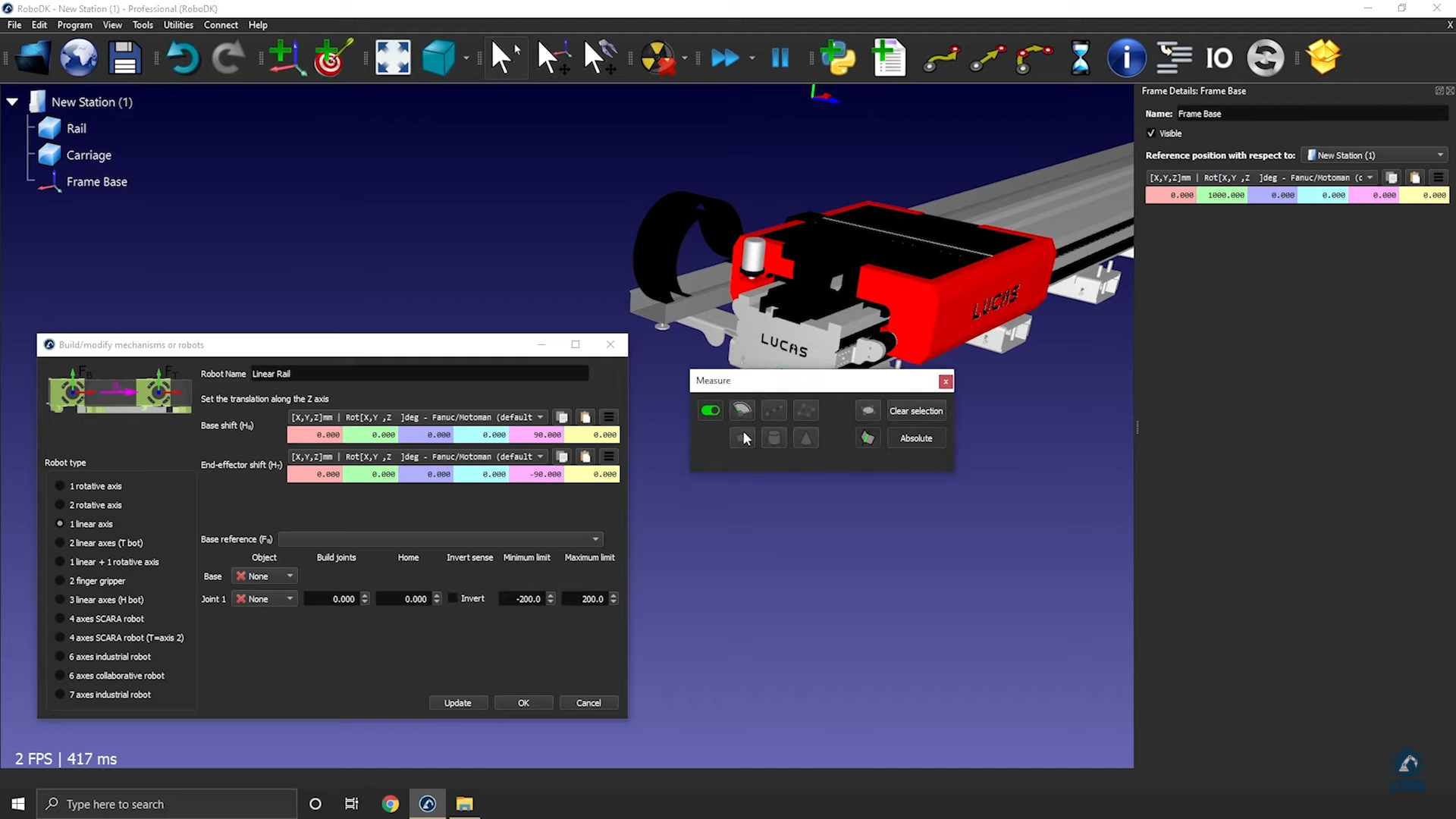
8.选择工具➔测量。
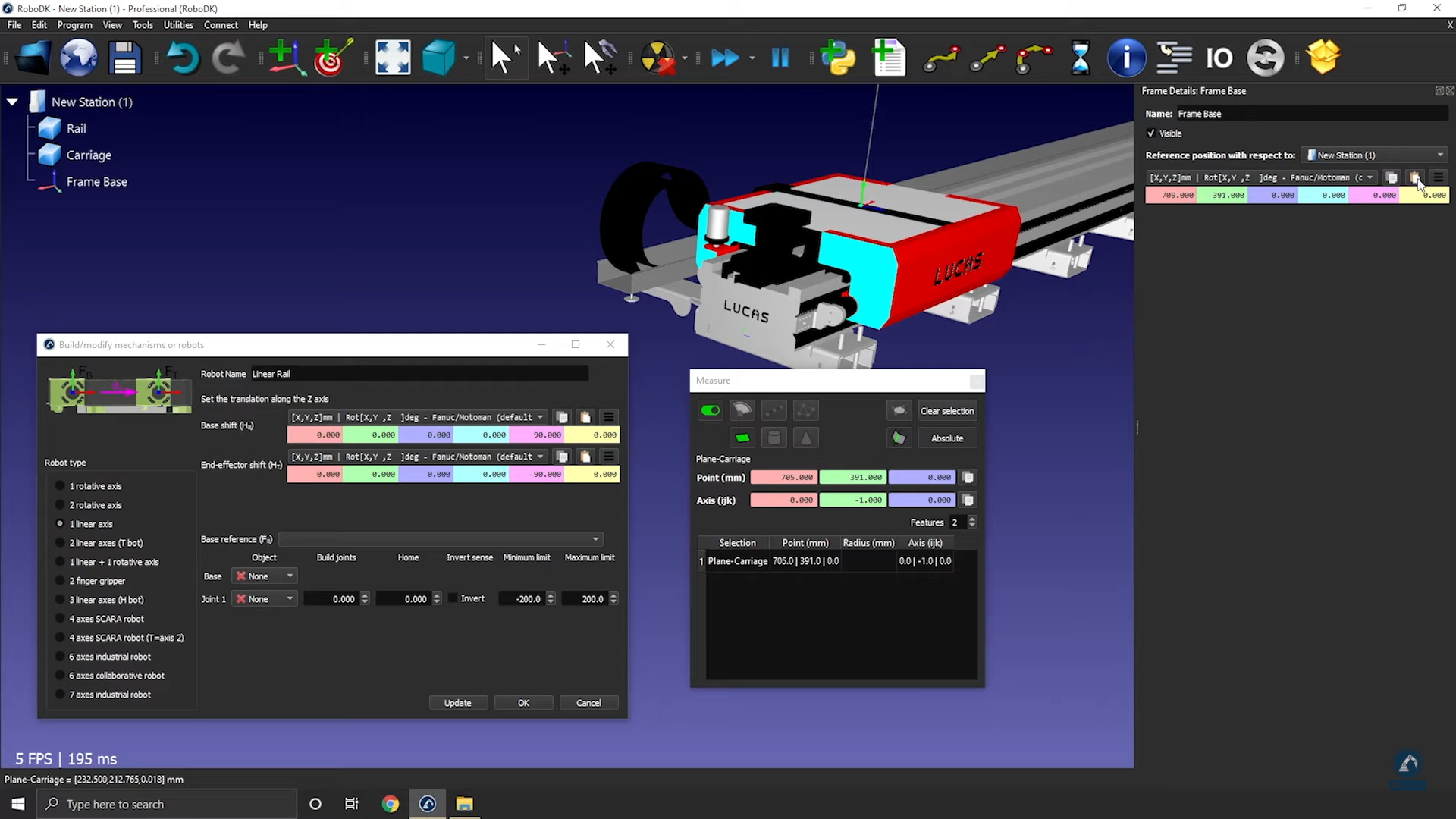
9.使用测量工具,根据下图所示的测量界面选择图标。
10.把值复制粘贴到Frame Base坐标系详情里(如下图所示)。
按照以下步骤检查方向并输入导轨长度:
11.绕X轴顺时针旋转90度:在参考坐标系位置窗口中输入 -90.000度
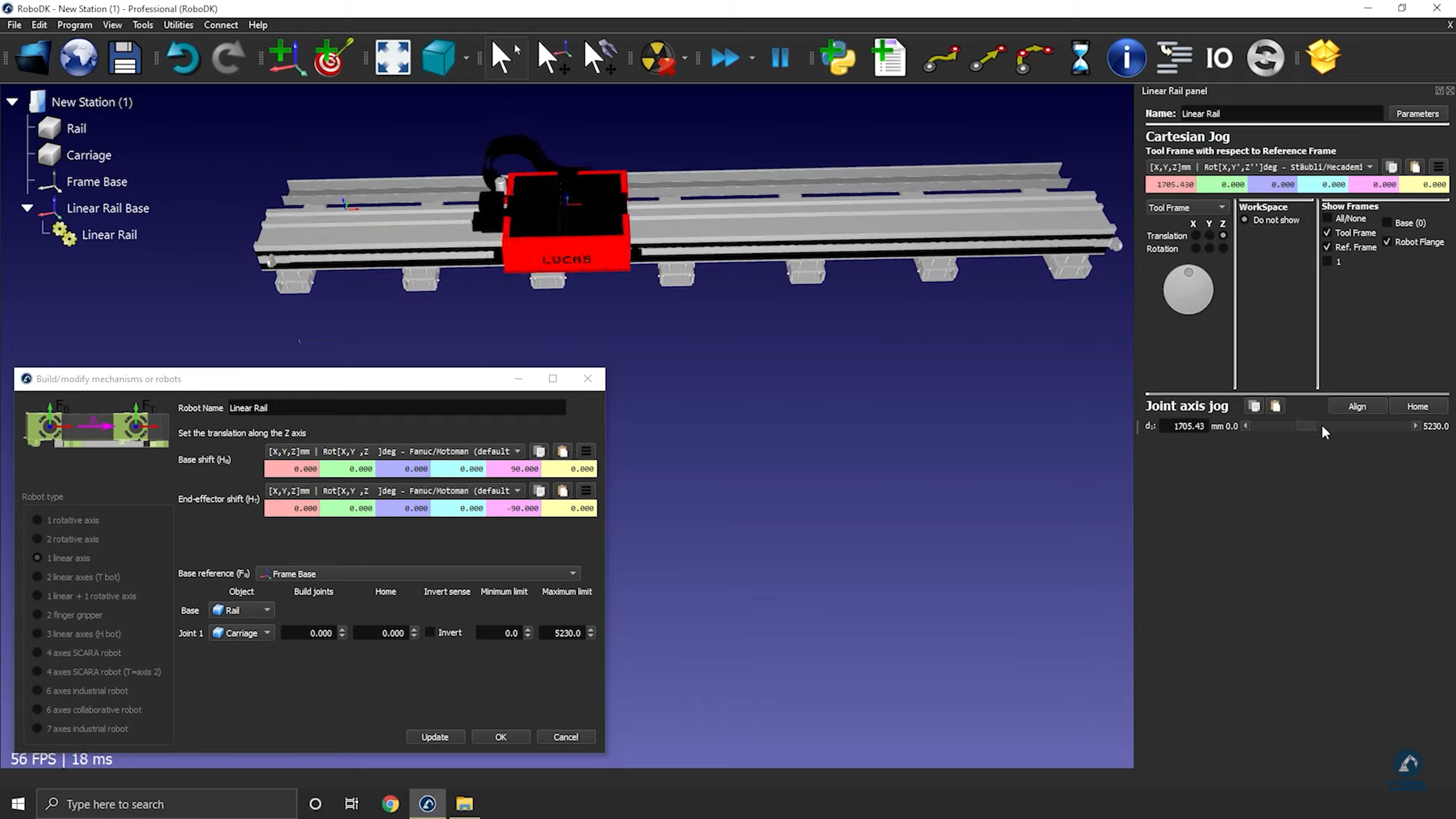
12.在模型机械结构窗口中输入轨道的长度(如下图所示)。
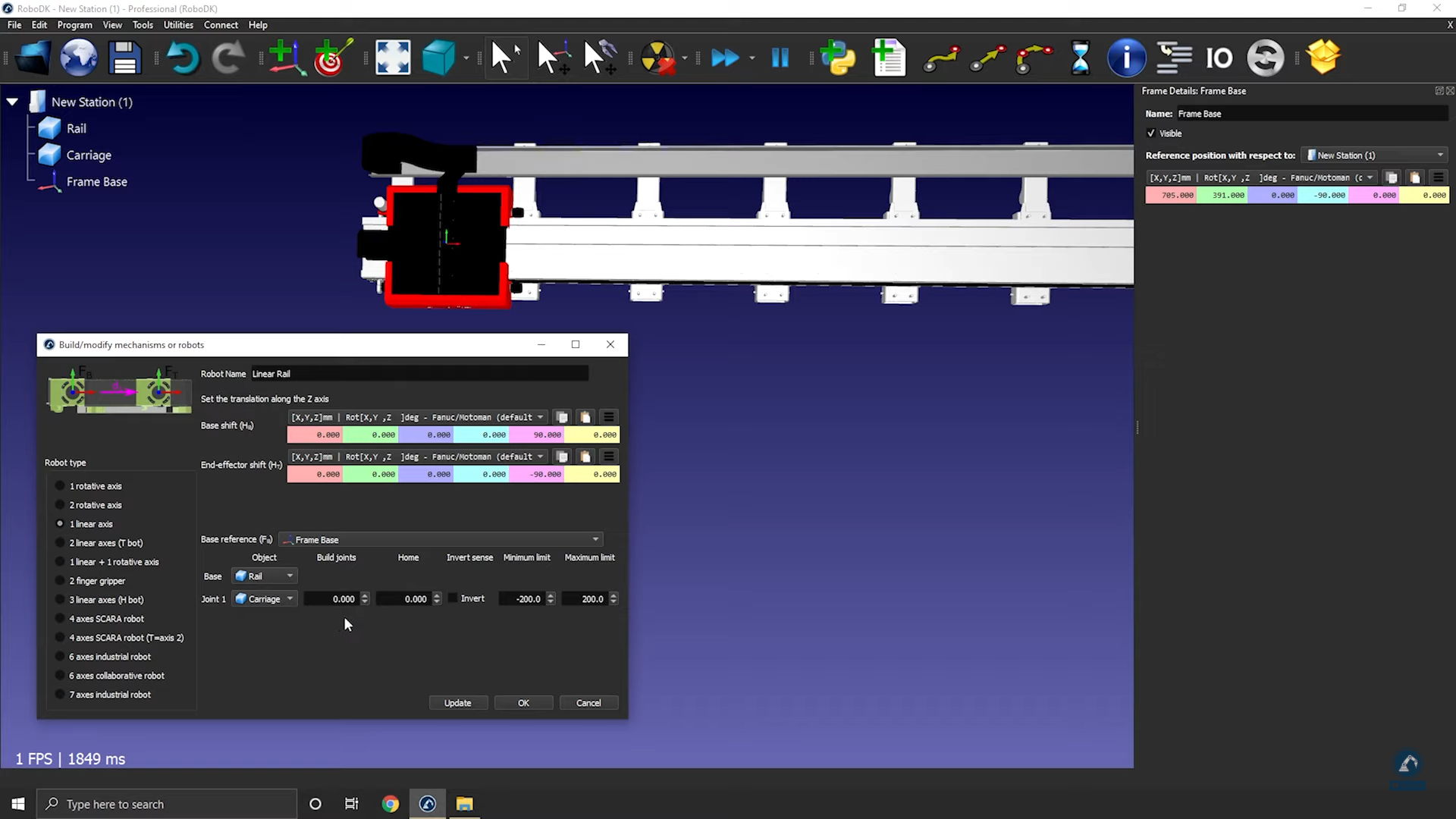
13.在建模窗口点击更新,即可创建机器人。
14.你可以通过“手动调节关节轴”测试轨道限位和移动方向是否符号预期。
15.核准无误后选择 "确定",完成建模。