如何建模
本章节介绍如何为1轴转台建模。转台通常用于机器人加工应用。
Video:以下教程展示了如何为1轴转台建模:https://youtu.be/18HKgBaE7Ag
创建转台模型的步骤:
1.加载转台的 3D 模型:将 3D 模型(STL、STEP 或 IGES 文件)拖放到 RoboDK 窗口。
Important:转台的每个运动部件需作为独立对象。右击对象选择分离物体,可分割子部件,选中多个对象后选择合并可重新组合。
Important:为简化建模,需确保参考坐标系的Z轴(蓝色轴)与旋转轴对齐。
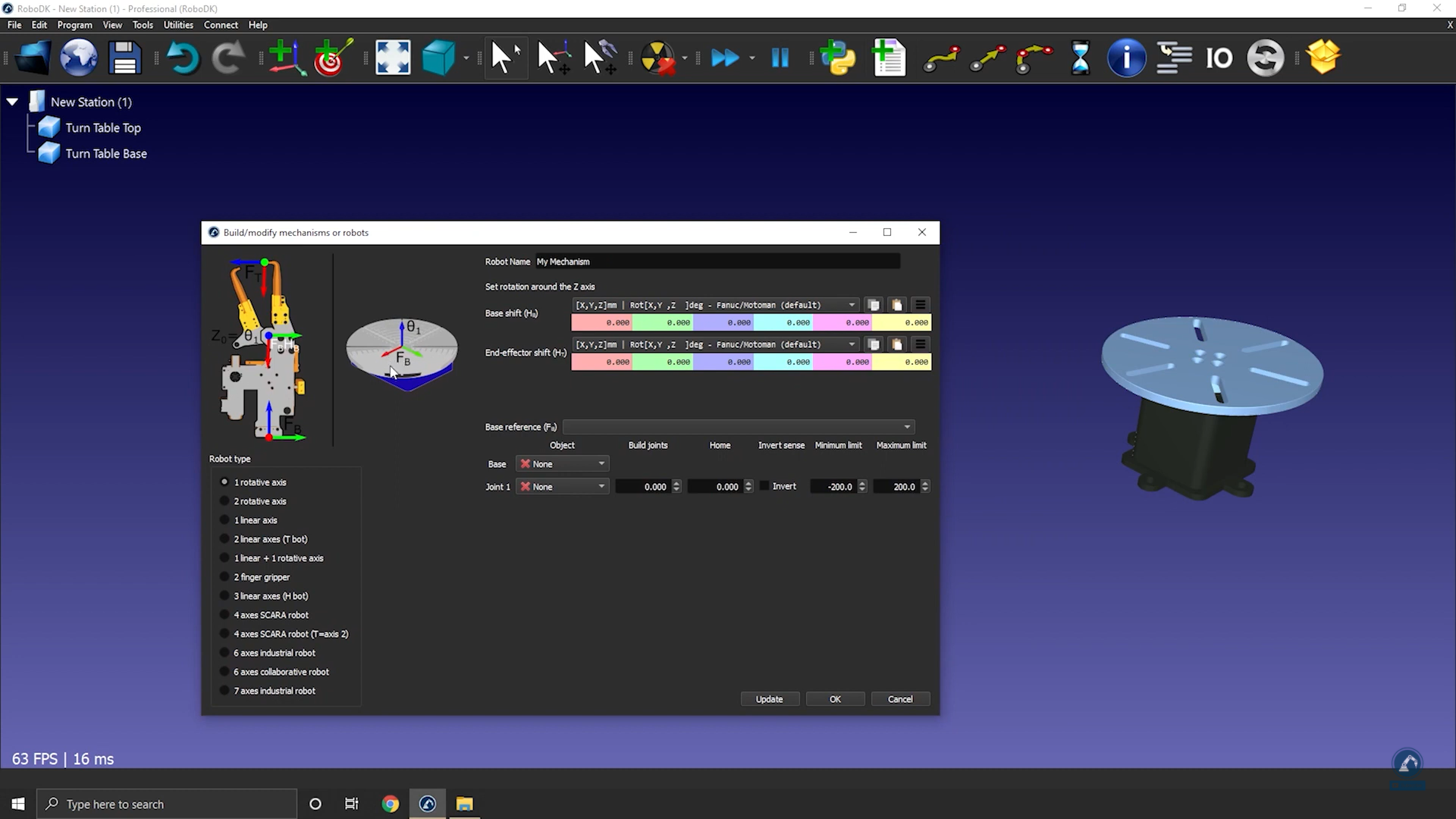
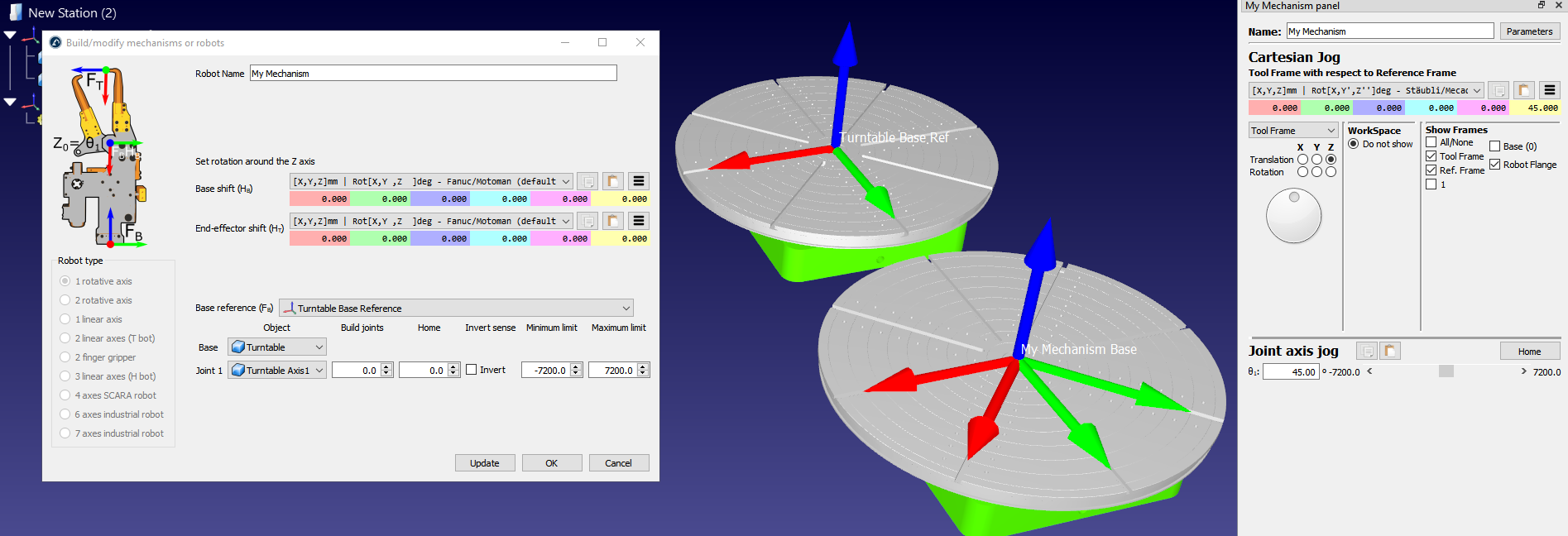
2.在菜单栏处点击:实用程序➔ 建模结构或机器人。
3.下拉选项选择:1 个旋转轴。
4.根据界面示意图,确保基座(Base)和顶板(Top Plate)正确对齐。旋转轴方向:结构将围绕基座坐标系(Fb - Frame Base)的 Z轴 旋转。
5.将机械结构重命名为TurnTable。
通过创建新的坐标系来定义转台的参考基准::
1.创建新坐标系,命名为Frame Base(FB)。
2.打开坐标系面板,调整位置。
3.选择 "工具",然后选择 "测量"。
4.点击物体表面的测量位置,将测量值粘贴至坐标系的面板,如下图所示。
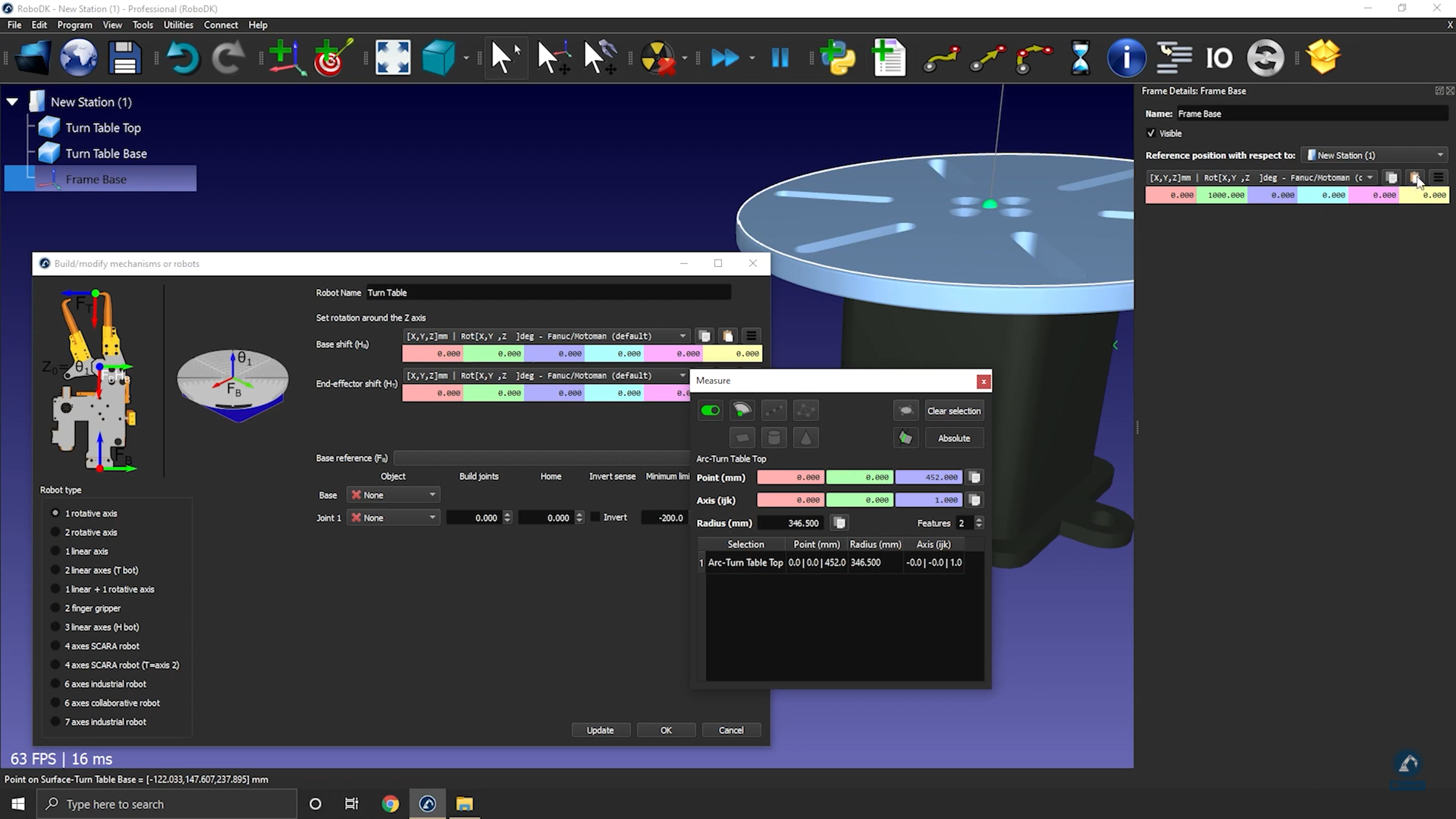
现在参考位置应与图像中的参考位置匹配。参考框架和对象项应自动填充。如果自动选择不正确,你可以相应地进行更新。
6.调整关节限位(可选)若需设置转台旋转范围为±20圈(即±7200度),可直接在关节限位栏输入数值。后续修改:双击机器人面板中的关节限位标签即可重新调整。
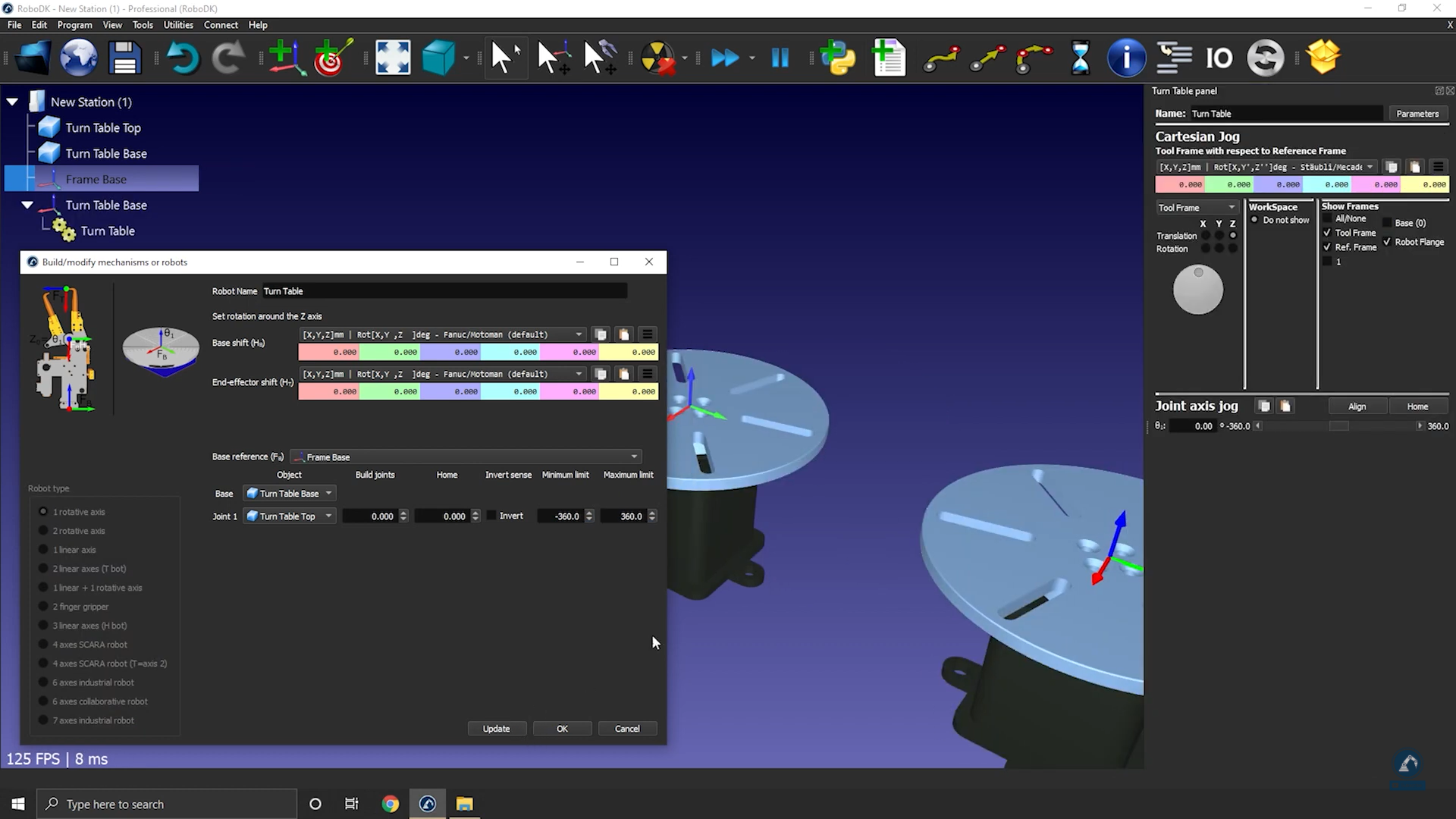
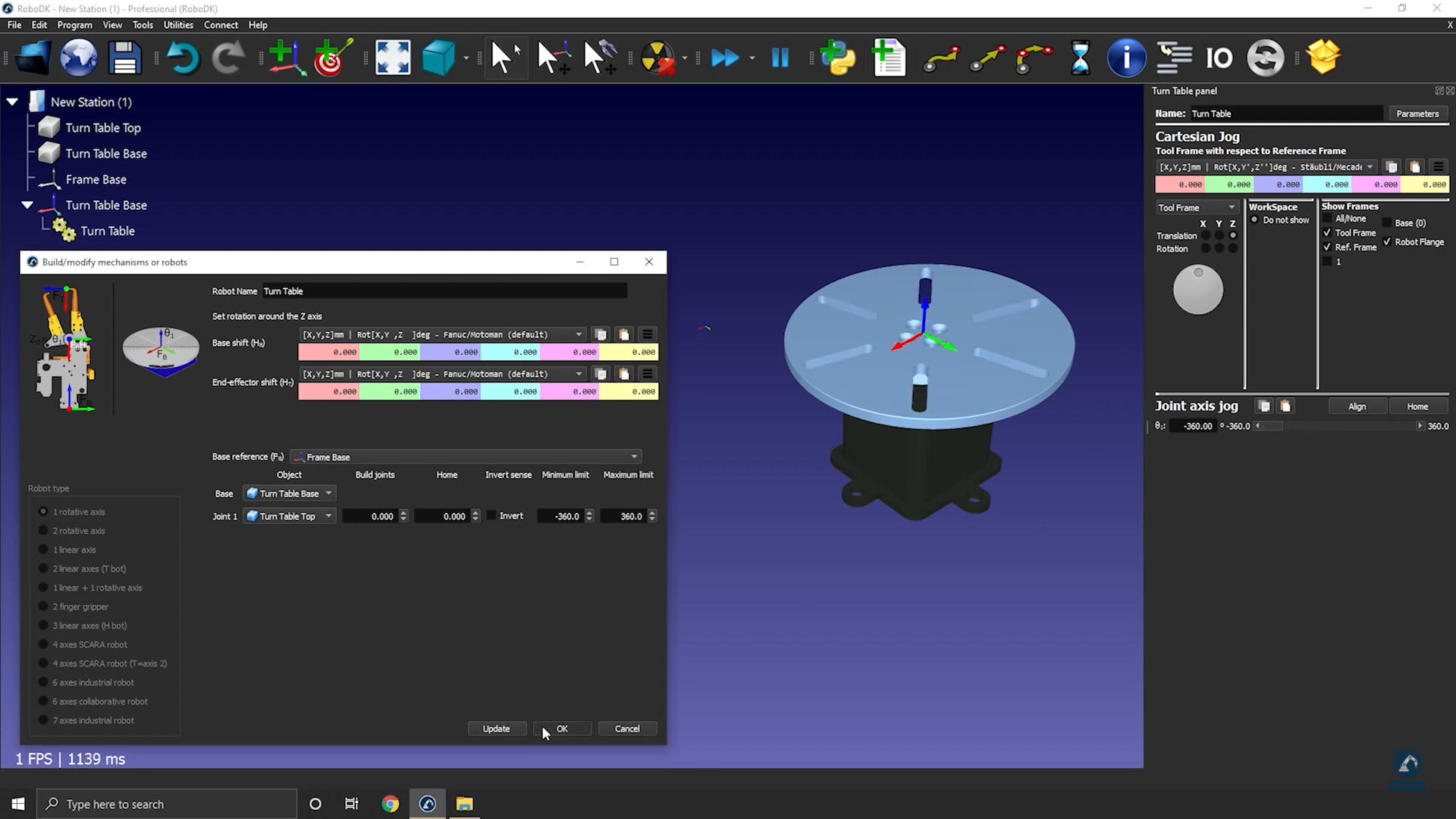
7.点击更新,就会生成结构模型。
8.点击 确定即可关闭窗口,或继续调整转台参数。
9.创建完成后,可删除用于构建结构的原始3D模型文件,结构数据已嵌入RDK项目文件,不需要外部依赖。
10.测试转台运动方向和轴限制是否符合预期后,点击确认完成建模。
Note:如果右上角图像中的参考坐标系与基础参考坐标系(Fb)不匹配,你可能需要输入相应的平移量作为基础偏移(Hb)。你还可以添加一个新的参考坐标系,并使用工具➔测量工具在特定位置放置一个坐标系。
Tip:需校准转台与机器人的相对位置时,可参考校准1轴程序精确定位。
Tip:按照此单轴转台校准步骤,可准确地将转台置于机器人的位置。