如何建模
以下视频演示3轴机械装置(H-Bot结构)的建模方法。该机构可通过在外部轴向安装机械臂实现工作范围扩展。
Video:三轴机械装置的建模实现过程https://www.youtube.com/watch?v=L1wG93rRZS0
按照以下步骤导入3D模型:
1.在 RoboDK 中拖放 3D 模型(STEP 或 IGES 文件),将其加载到工作站中。
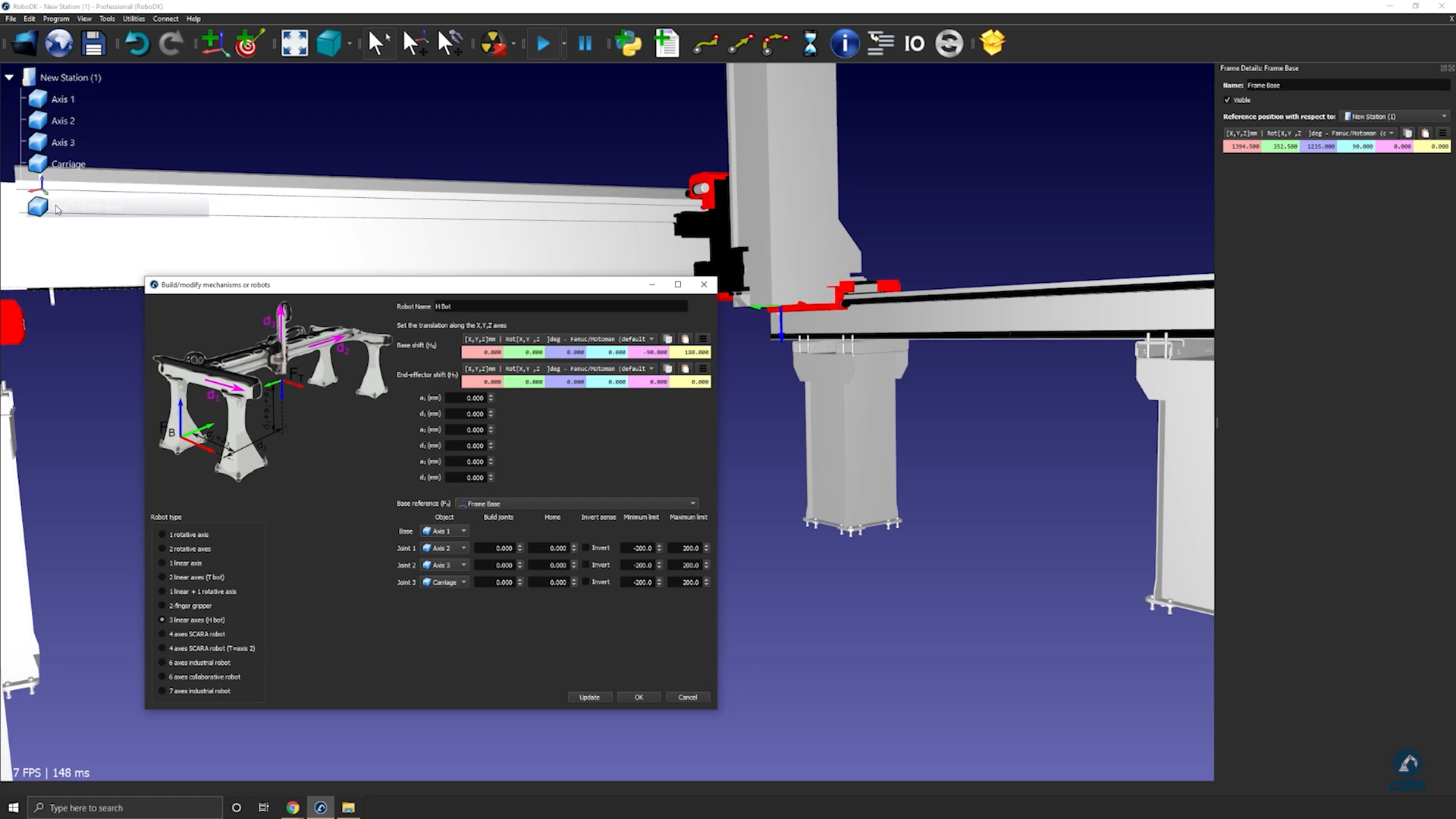
2.打开机械结构生成器:选择实用程序➔建模结构或机器人。
3.在下拉选项中选择:3个线性轴(H-bot)。
Note:基准坐标系(Fb)位于机械结构的 0.00 位置。
Note:当你需要将物体分割成多块,你可能需要改变机械结构的颜色,可以按照六轴机器人建模教程中的步骤进行操作。
按照以下步骤创建基坐标系:
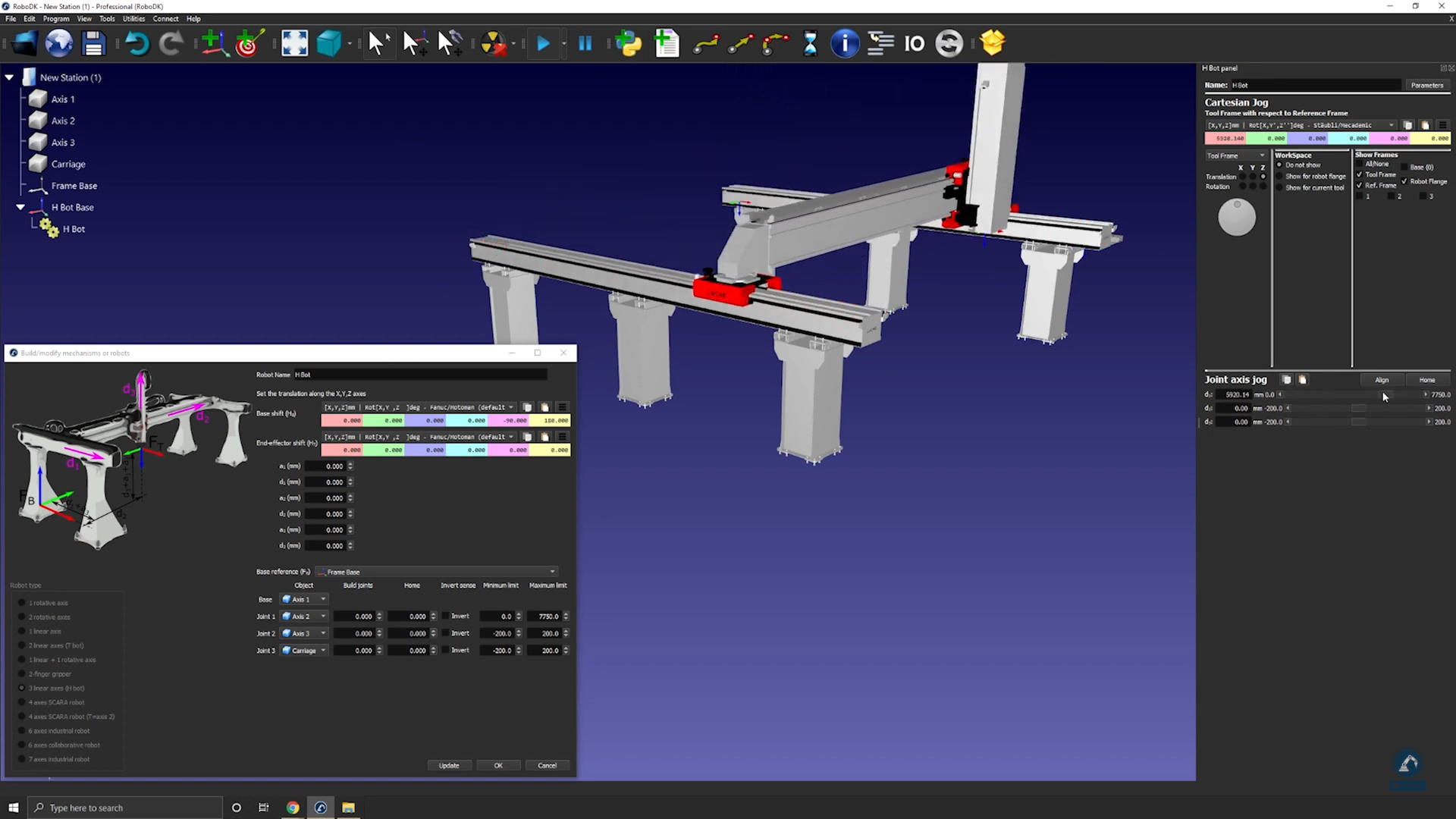
4.当你把对象分割成不同部分后,需要重新打开机械结构生成器(通过点击实用程序➔建模结构或机器人➔ 3个线性轴(H-bot))。
5.你可以给机械结构命名为H-bot。
6.在轨道的 0 位置创建基坐标系,比如Frame Base。
按照以下步骤调整基坐标系的位置:
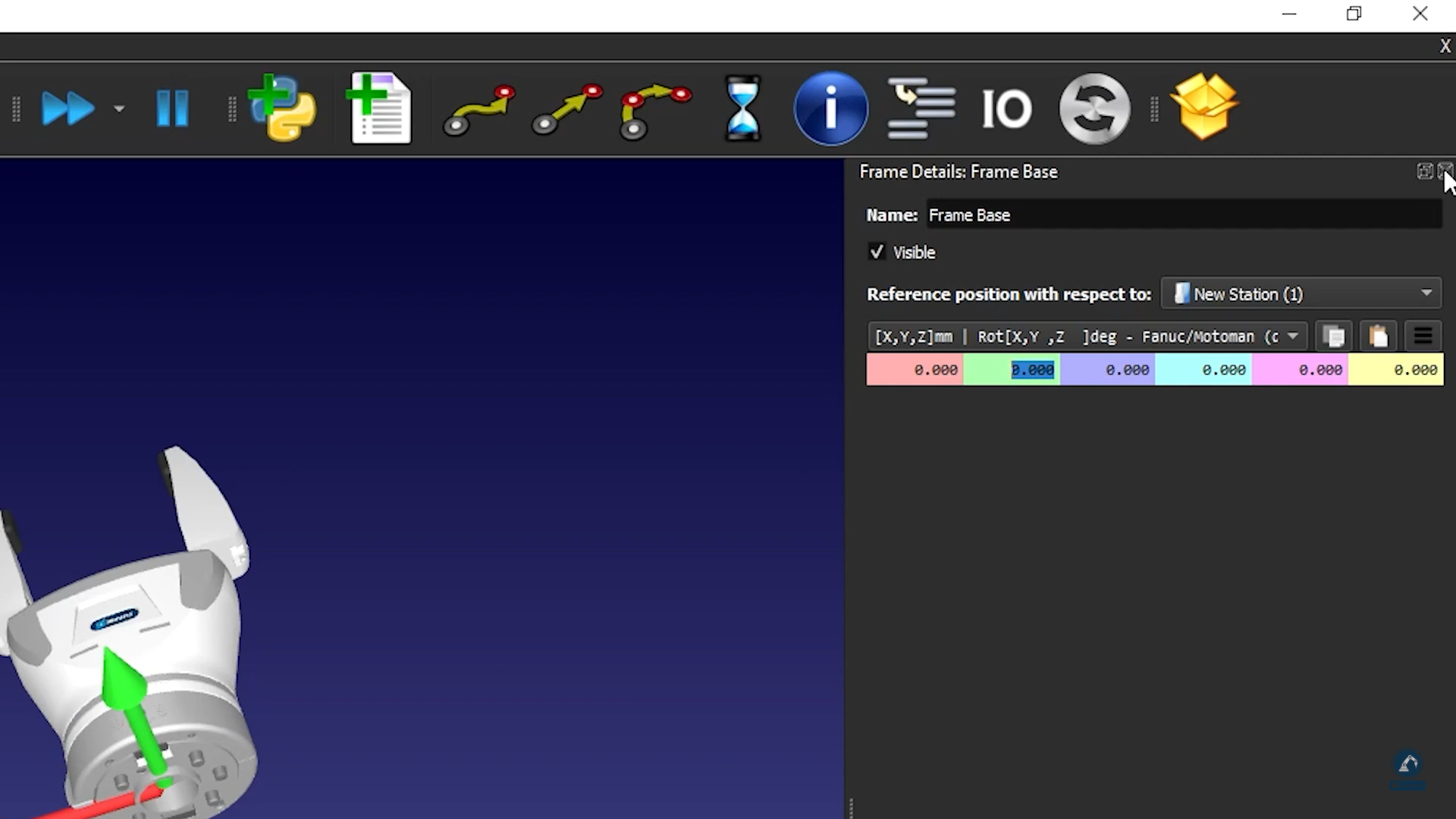
7.双击Frame Base,打开坐标系面板。
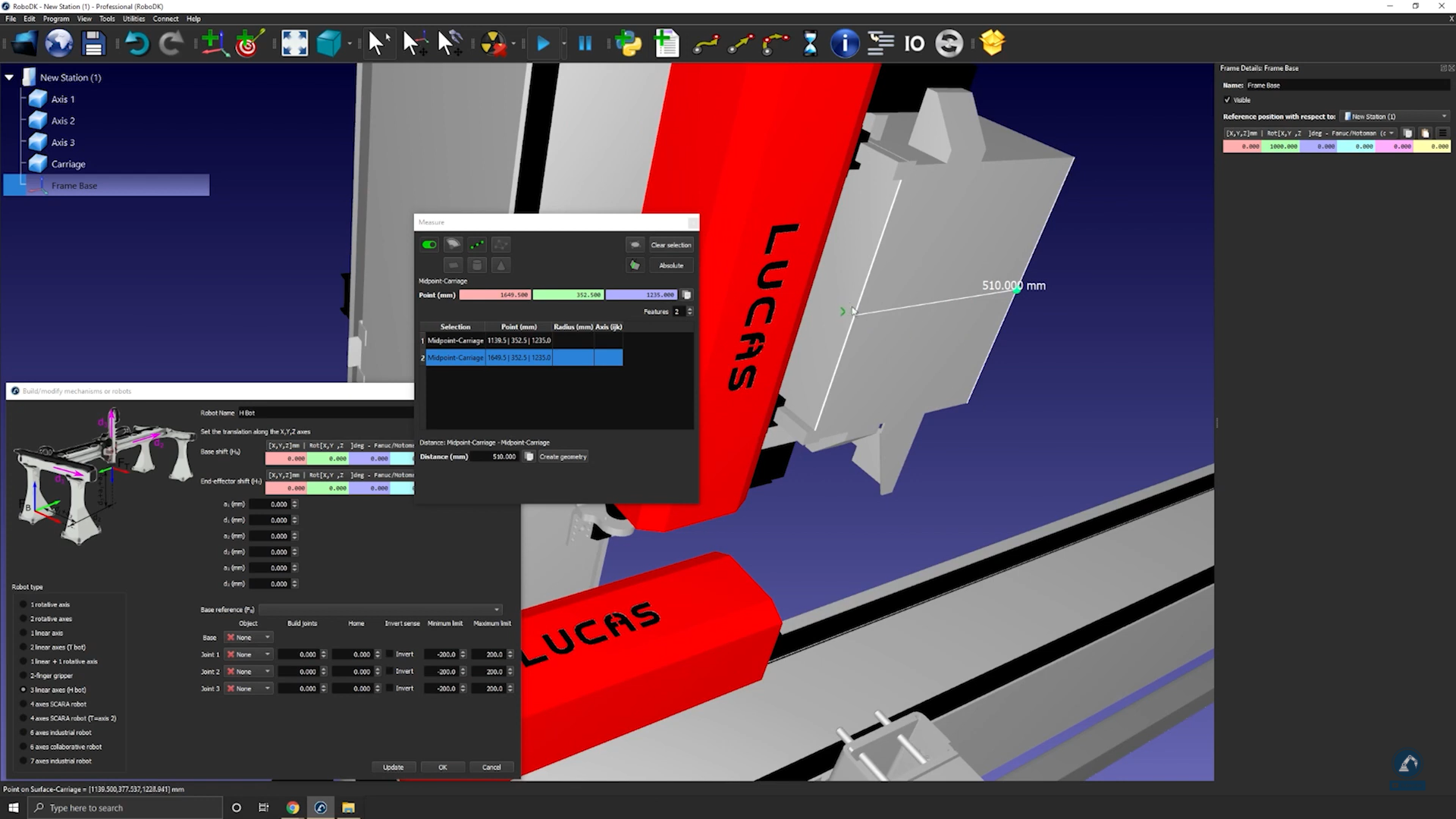
8.然后打开测量工具:工具➔ 测量。
9.在测量工具中点开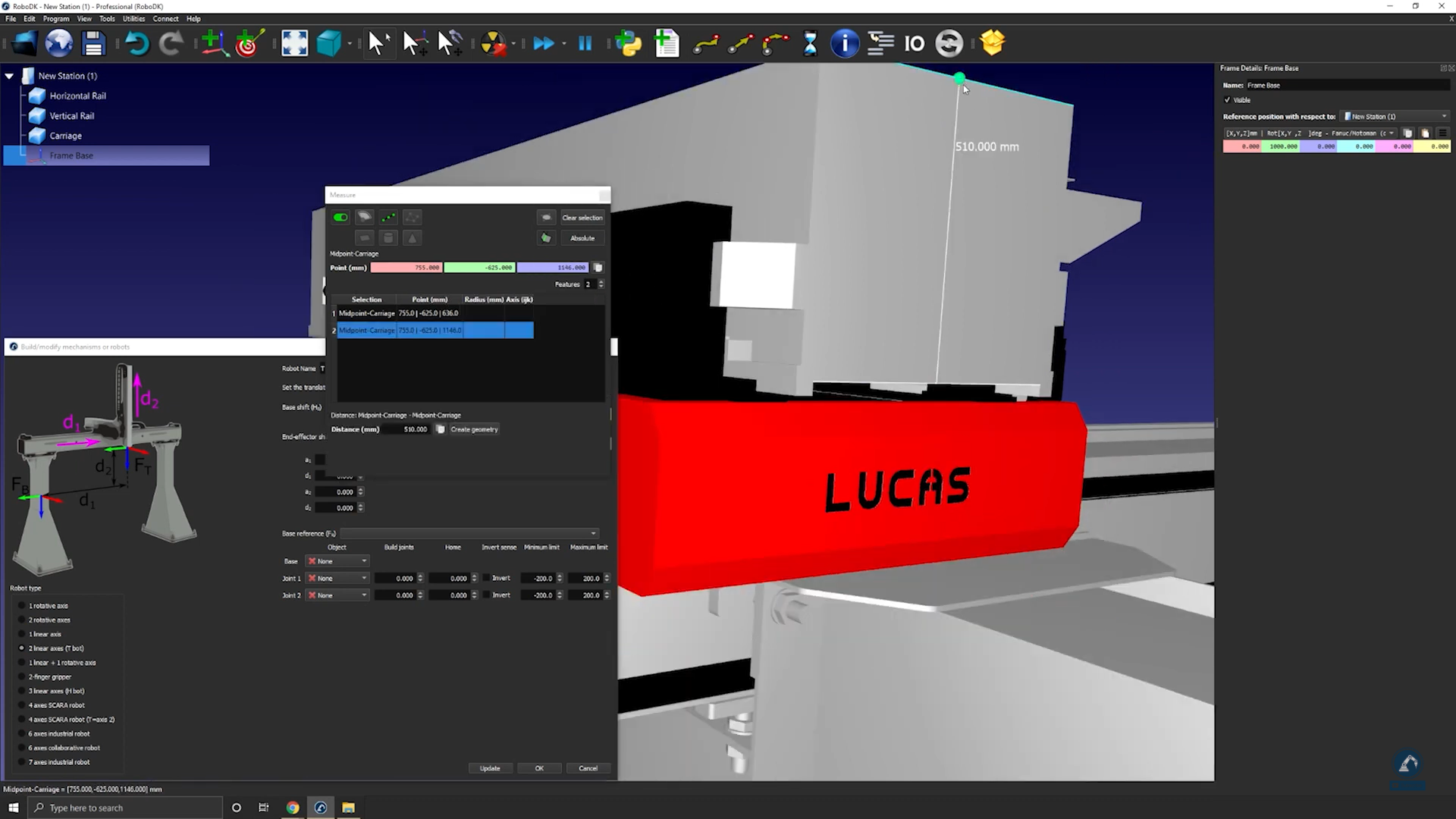
10.在测量窗口,点击创建几何按钮,此时会在两个中心点之间生成一条直线。
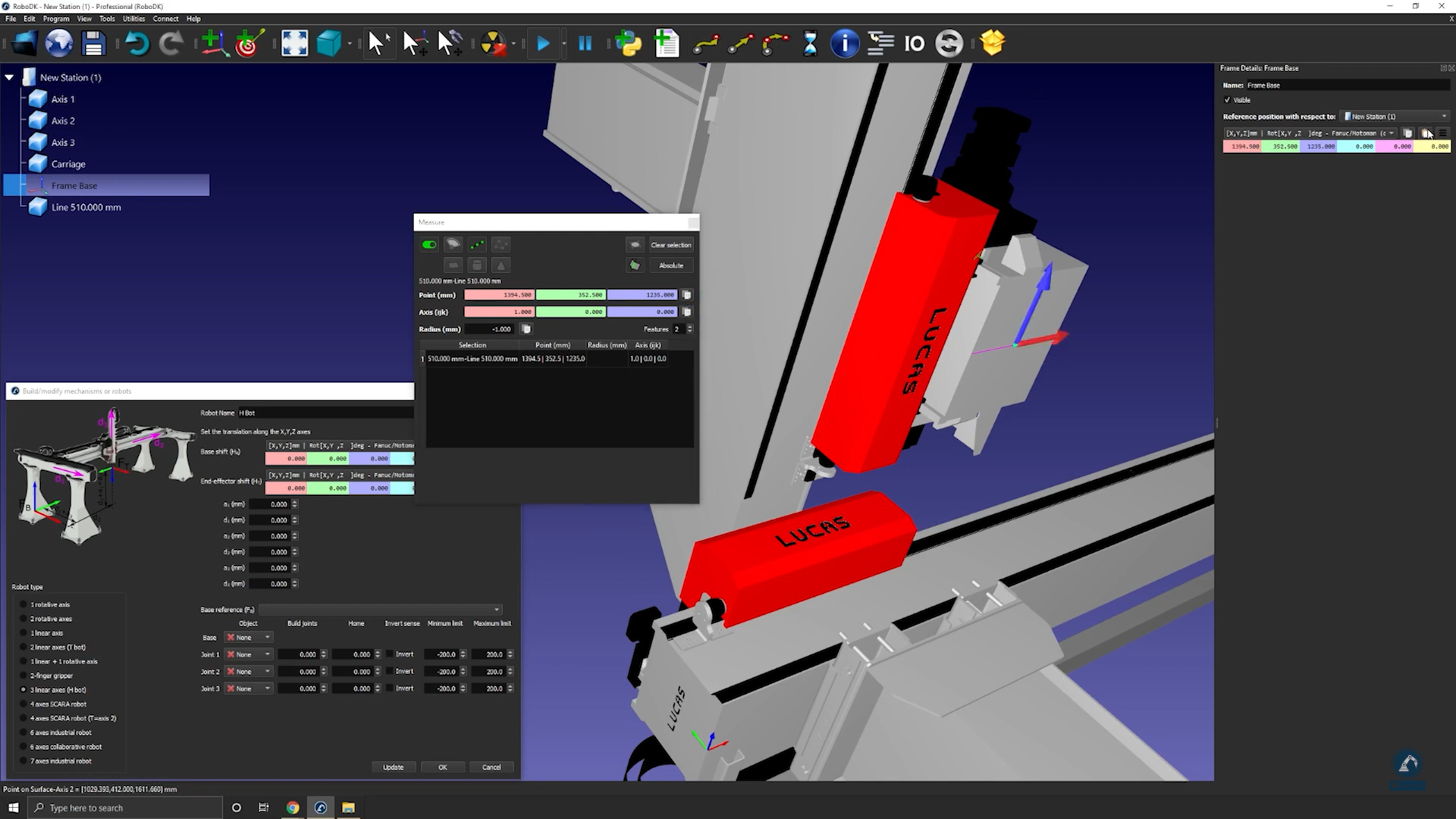
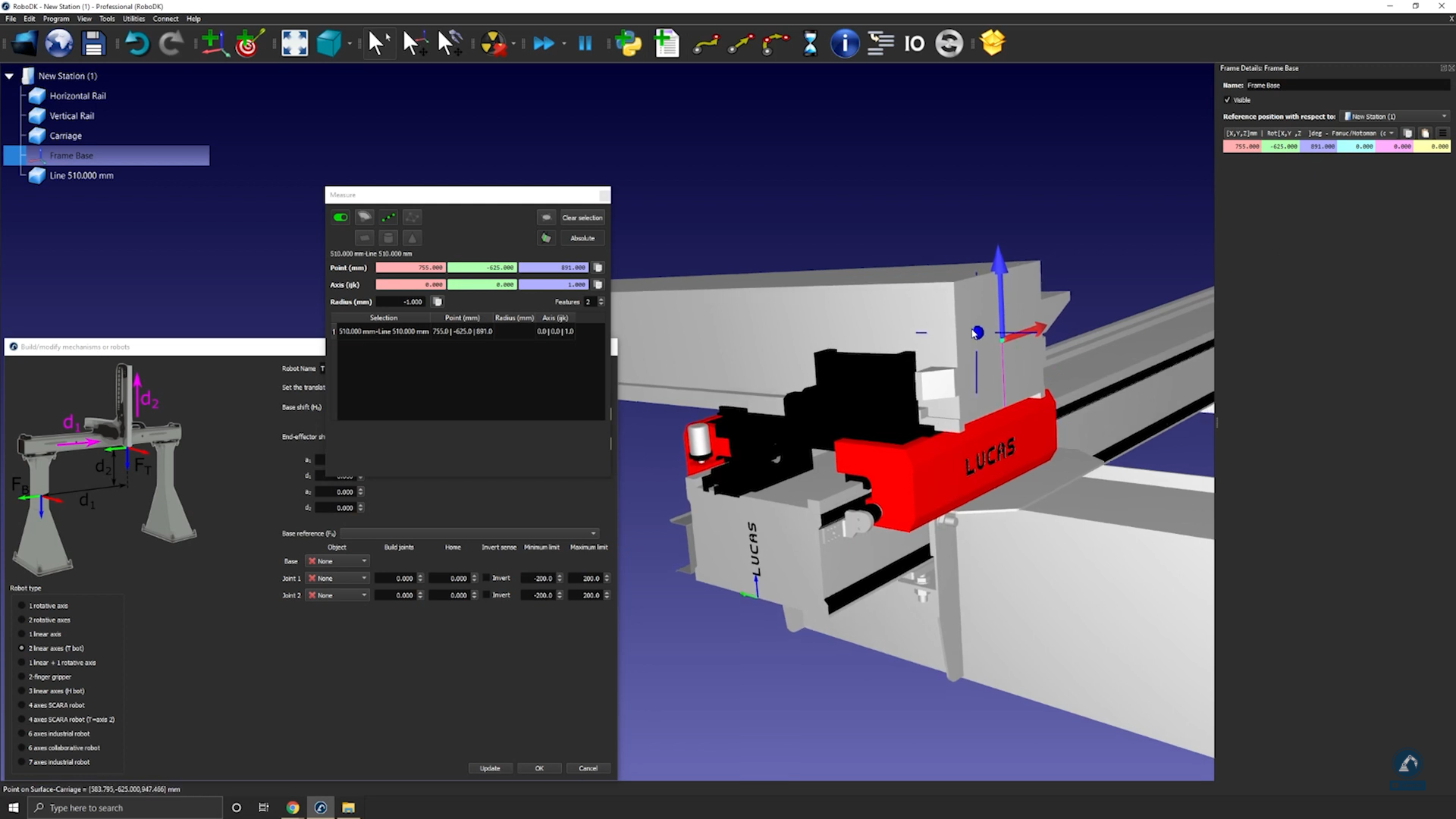
11.现在两个点之间的线已创建,你可以在测量窗口 "清除选择"。
12.然后点击该直线的中心点,此点是新创建直线中心点。
13.复制数值并粘贴到基坐标系(如下图所示),确保坐标系位置与参考坐标系图像一致。
按照以下步骤确保方向一致:
14.逆时针旋转90 度。
15.如下图所示,选择对应的坐标系,然后逐个为每个轴选择物体对象。
16.在该窗口输入每根导轨的长度。
17.测试:在手动调节关节轴窗口滑动每个轴,确保每个轴滑动的范围符合预期。
18.测试完每个轴后,按 "更新 "键,即可创建机械结构了。
19.如果一切正常,此时选择确定,这个机械结构就完成了。
Note:如果轴未按预期方向移动,你可以在机械建模器中勾选每个轴的“反转”选项来调整角度。