建构结构或机器人
在RoboDK中,你可以建模各式各样的机械装置,包括转台、1~3个线性轴结构、机器人手臂、SCARA机器人、AGV、CNC机床、夹爪。
简化的操作步骤:
1.在菜单中选择:实用程序➔ 建构结构或机器人。
2.选择要创建的机械结构或机器人类型。
3.选择代表机械结构原点的坐标系。
4.为每个关节(机械结构或机器人的运动部件)选择一个物体。
5.输入相应图片中描述的机器人参数。
6.在窗口中点击:更新,就可以查看新的机械结构。
Tip:确保与图像中提供的参数和坐标系相匹配。
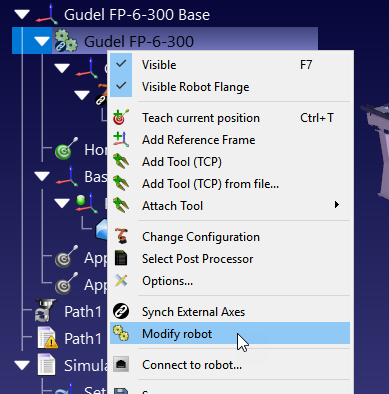
你也可以通过右键单击树中的机器人项并选择修改机器人,修改现有的机械结构。此选项适用于你自己创建的机器人和机械结构。
支持的结构类型:
●单旋转轴(如转台或旋转夹爪)
●双旋转轴(如2轴变位机)
●单线性轴(如直线导轨)
●双线性轴(如T型台)
●三线性轴(如H型台)
●1线性轴 + 1旋转轴(混合机构)
●双指夹爪
●SCARA机器人(4轴)
●6轴/7轴工业机器人
Tip:建议创建新工作站中对其他机械结构或机器人进行建模(选择文件➔ 新建工作站),再通过将机器人保存为机器人文件(右键单击机器人,选择另存为...)或直接复制/粘贴到你的项目中。
如何建模1轴转台
本章节介绍如何为1轴转台建模。转台通常用于机器人加工应用。
Video:以下教程展示了如何为1轴转台建模:https://youtu.be/18HKgBaE7Ag
创建转台模型的步骤:
1.加载转台的 3D 模型:将 3D 模型(STL、STEP 或 IGES 文件)拖放到 RoboDK 窗口。
Important:转台的每个运动部件需作为独立对象。右击对象选择分离物体,可分割子部件,选中多个对象后选择合并可重新组合。
Important:为简化建模,需确保参考坐标系的Z轴(蓝色轴)与旋转轴对齐。
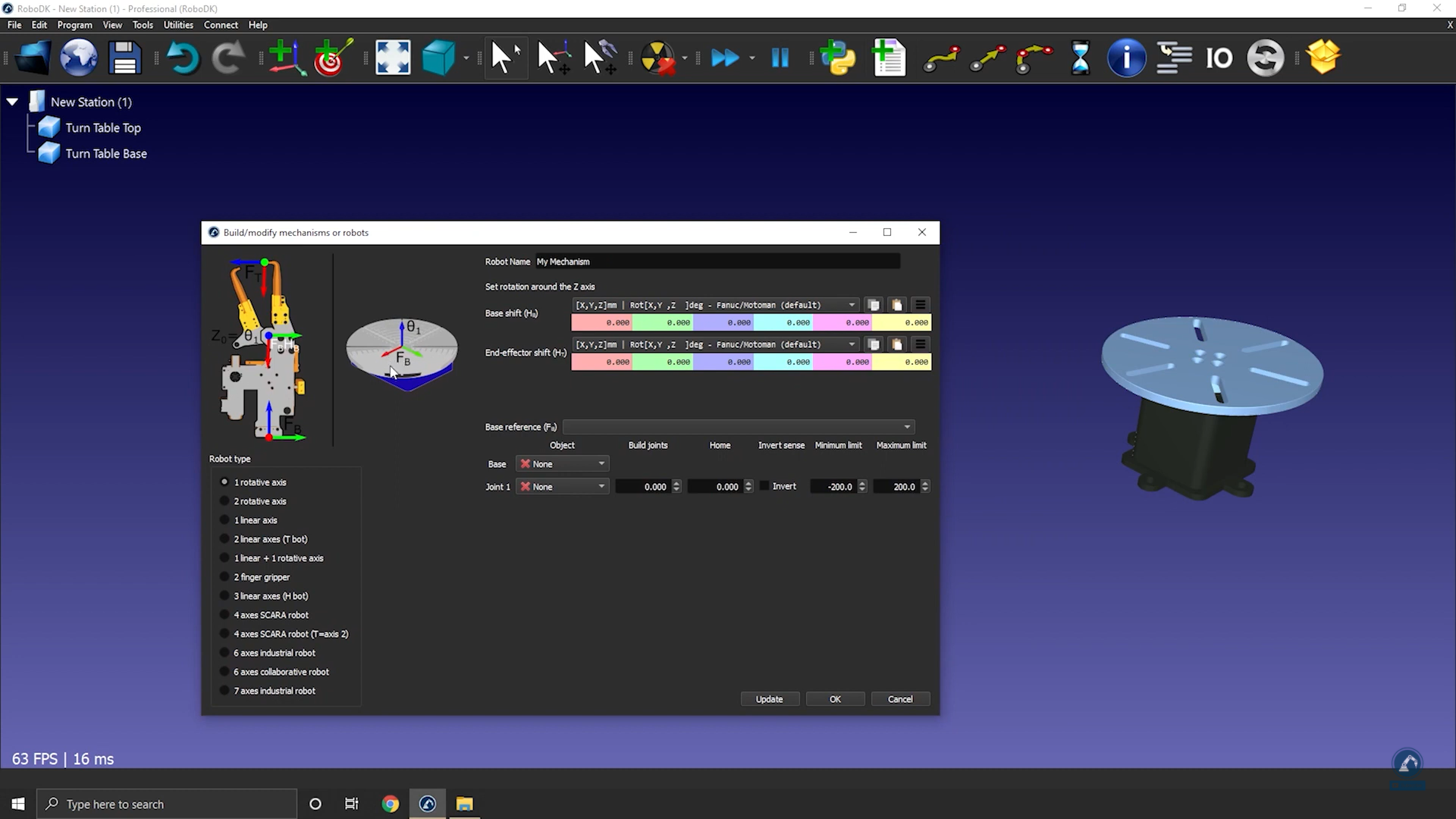
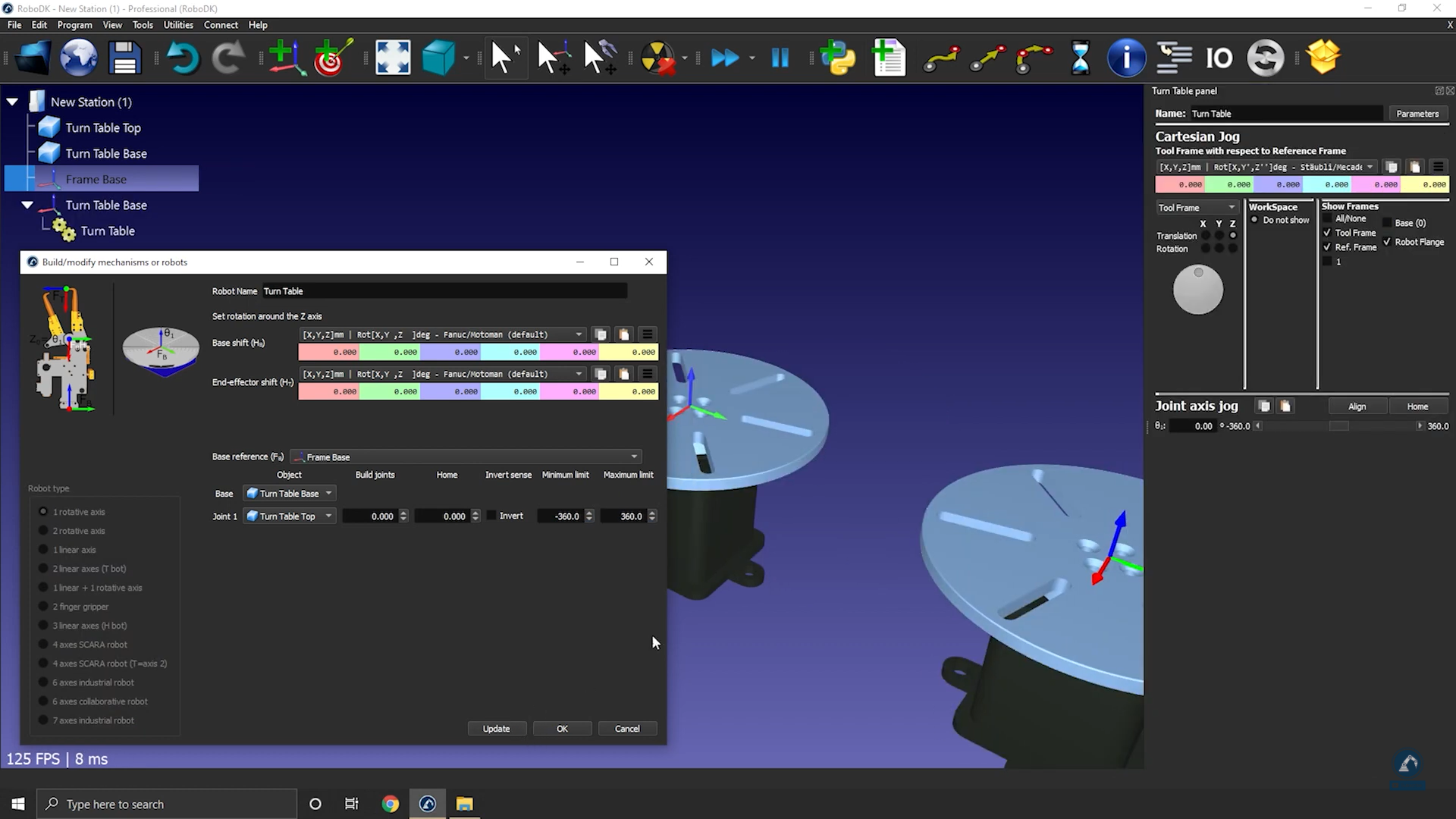
2.在菜单栏处点击:实用程序➔ 建模结构或机器人。
3.下拉选项选择:1 个旋转轴。
4.根据界面示意图,确保基座(Base)和顶板(Top Plate)正确对齐。旋转轴方向:结构将围绕基座坐标系(Fb - Frame Base)的 Z轴 旋转。
5.将机械结构重命名为TurnTable。
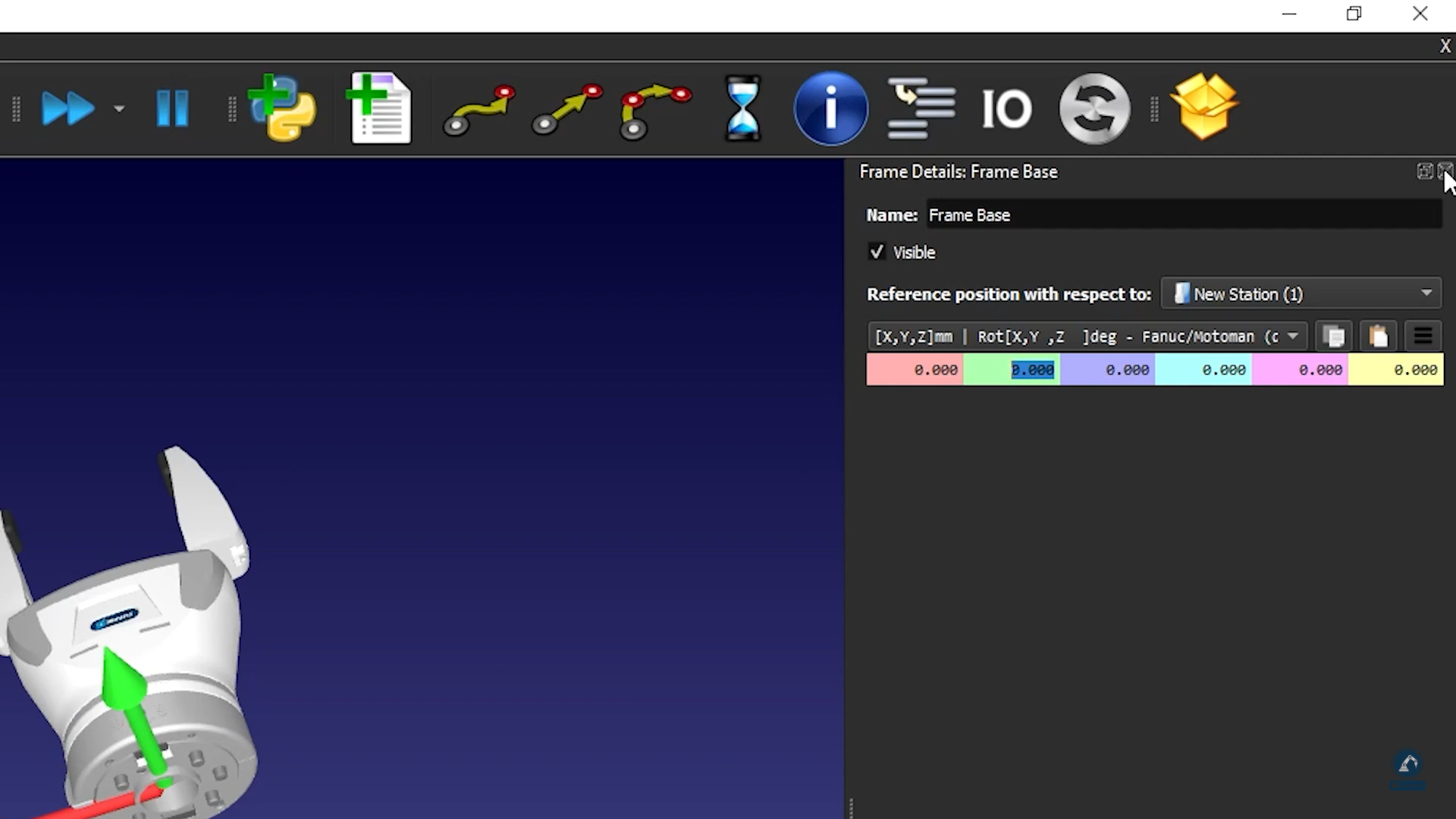
通过创建新的坐标系来定义转台的参考基准::
1.创建新坐标系,命名为Frame Base(FB)。
2.打开坐标系面板,调整位置。
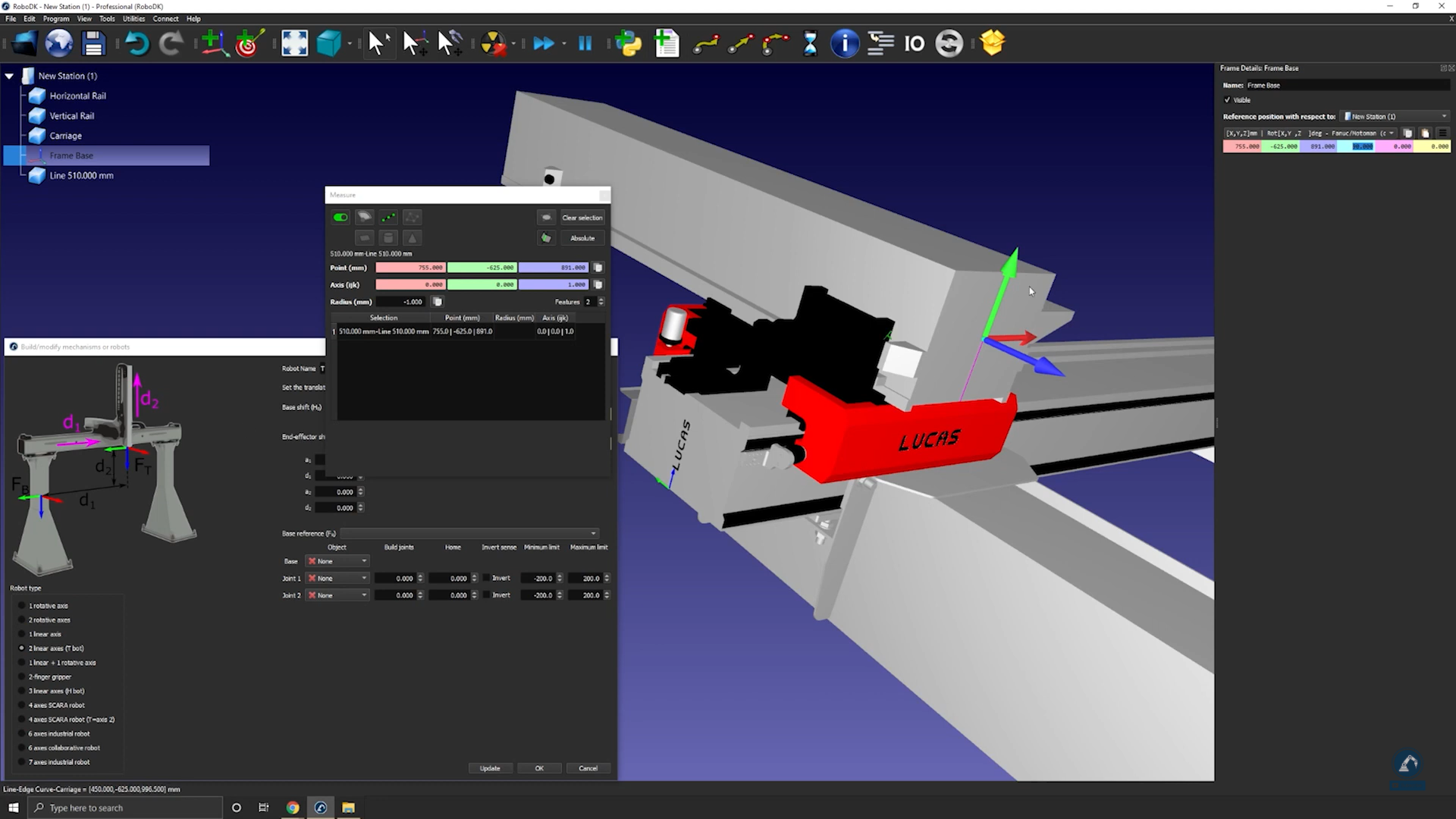
3.选择 "工具",然后选择 "测量"。
4.点击物体表面的测量位置,将测量值粘贴至坐标系的面板,如下图所示。
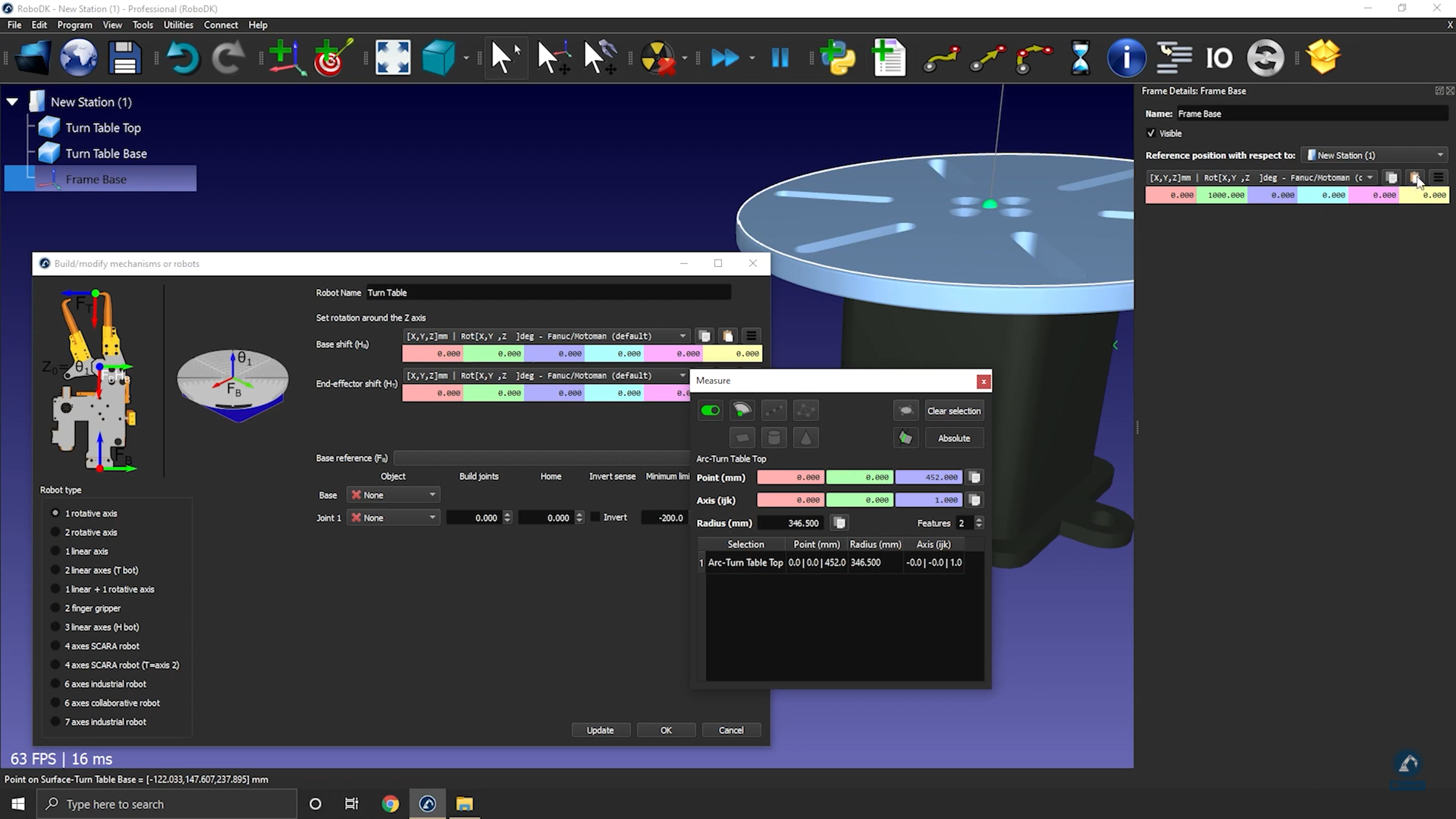
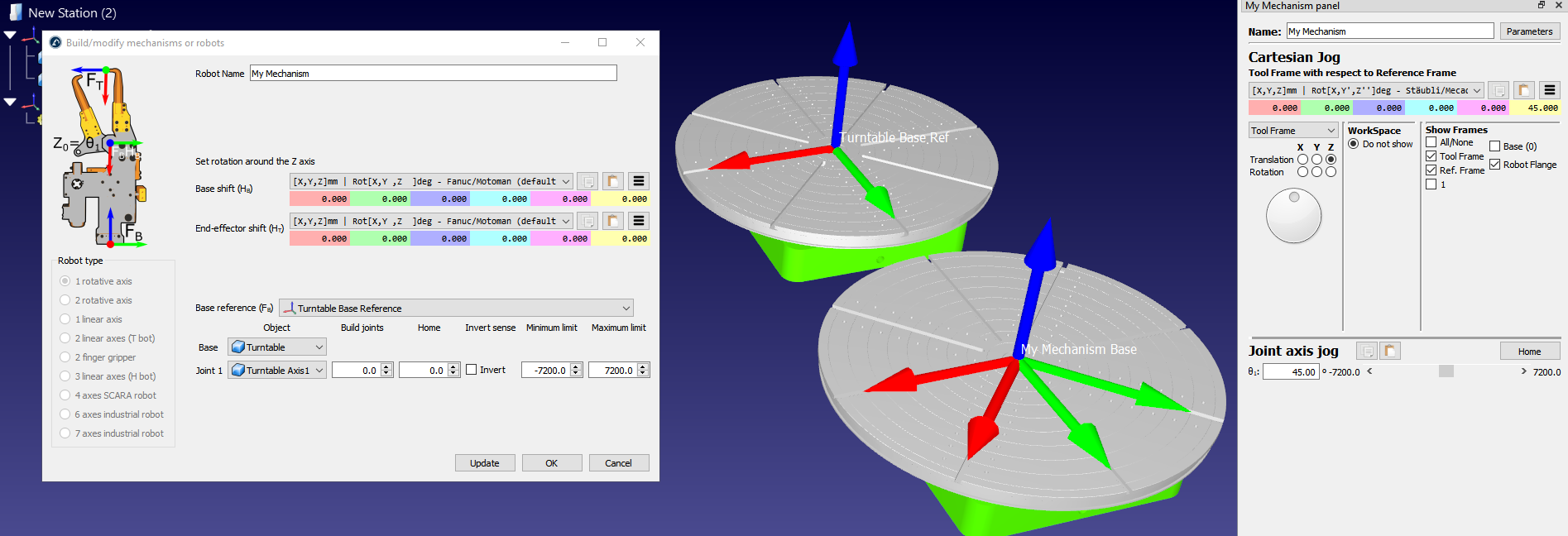
现在参考位置应与图像中的参考位置匹配。参考框架和对象项应自动填充。如果自动选择不正确,你可以相应地进行更新。
6.调整关节限位(可选)若需设置转台旋转范围为±20圈(即±7200度),可直接在关节限位栏输入数值。后续修改:双击机器人面板中的关节限位标签即可重新调整。
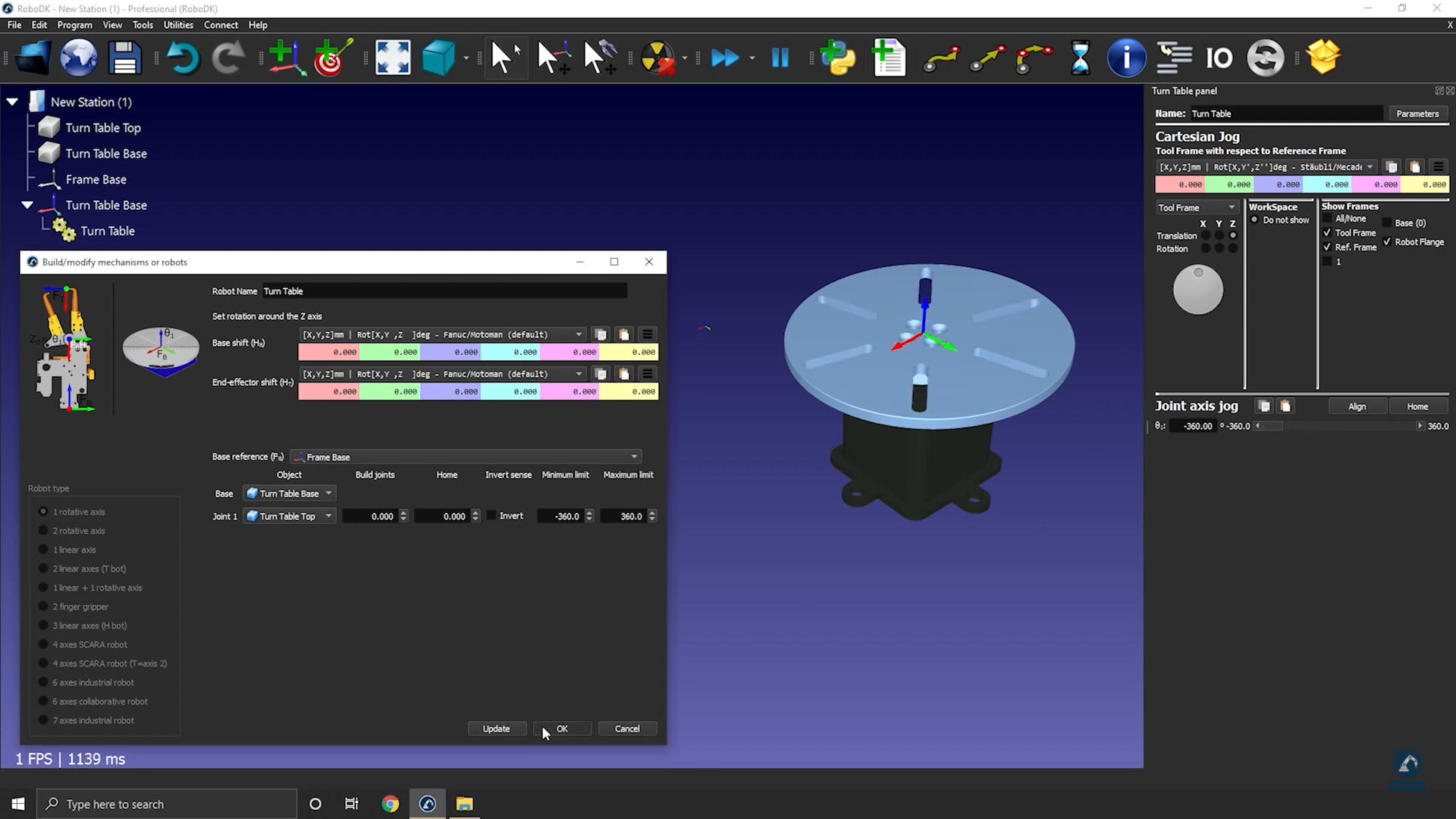
7.点击更新,就会生成结构模型。
8.点击 确定即可关闭窗口,或继续调整转台参数。
9.创建完成后,可删除用于构建结构的原始3D模型文件,结构数据已嵌入RDK项目文件,不需要外部依赖。
10.测试转台运动方向和轴限制是否符合预期后,点击确认完成建模。
Note:如果右上角图像中的参考坐标系与基础参考坐标系(Fb)不匹配,你可能需要输入相应的平移量作为基础偏移(Hb)。你还可以添加一个新的参考坐标系,并使用工具➔测量工具在特定位置放置一个坐标系。
Tip:需校准转台与机器人的相对位置时,可参考校准1轴程序精确定位。
Tip:按照此单轴转台校准步骤,可准确地将转台置于机器人的位置。
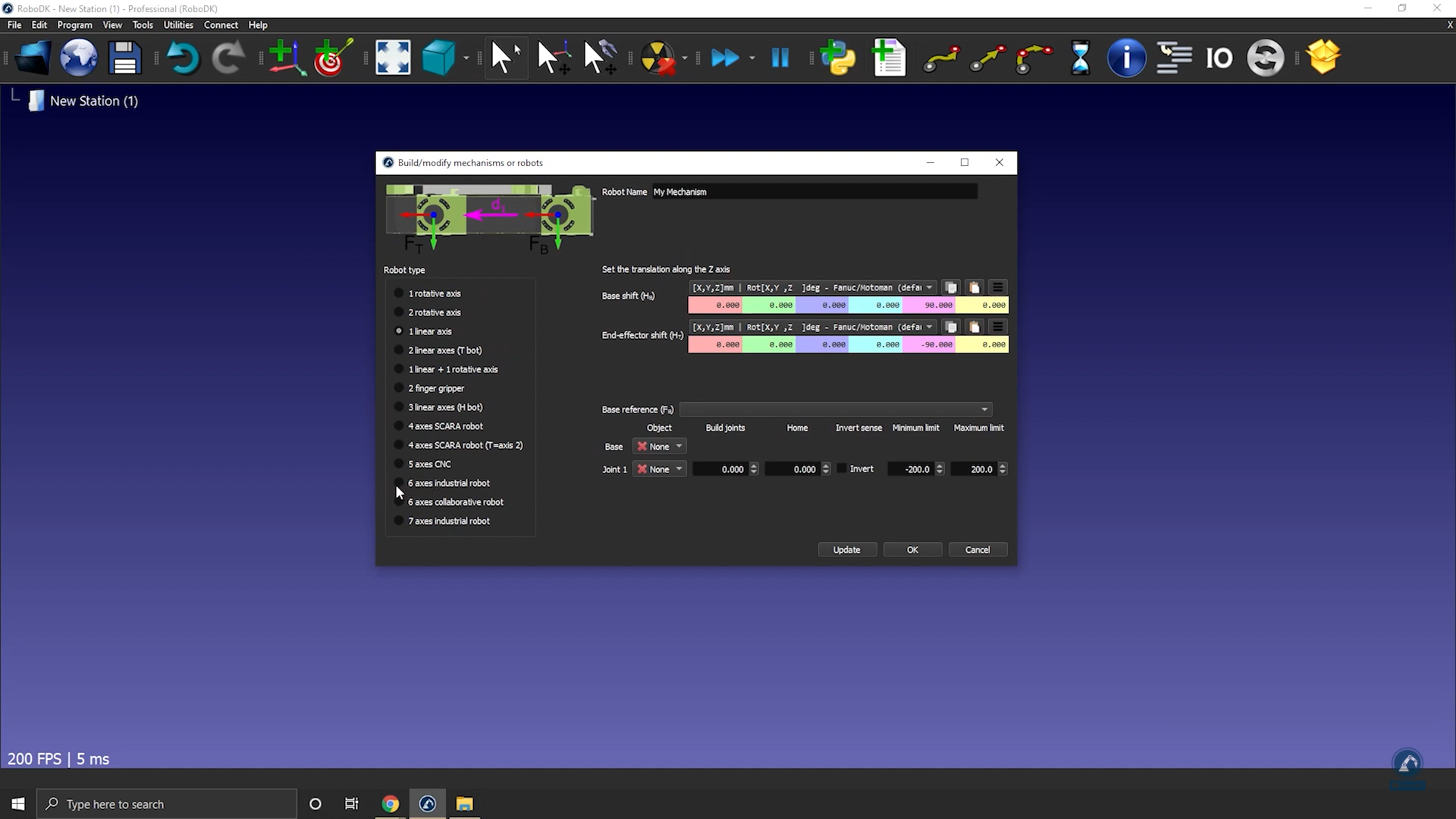
如何建模1轴直线导轨
本节介绍如何对单轴线性轨道(也称线性轴或线性轨道)进行建模。线性轨道有助于扩展机器人手臂的触及范围。
Video:如何制作单轴直线导轨:https://www.youtube.com/watch?v=KTRDmHTOy0M
按照以下步骤导入 3D 模型:
1.在 RoboDK 中拖放 3D 模型,将物体导入工作站(可接受的文件格式包括 STEP、IGES 或 STL 等常见 3D 格式)。
请按照以下步骤打开机械结构生成器:
2.选择实用程序➔ 建模结构或机器人。
3.在下拉选项中选择:1 个移动轴。
4.如果3D模型是组合在一块的,你可以在 RoboDK 中拆分模型。
Note:要将物体分成两块,并更改模型的颜色,可以按照六轴机器人的建模步骤进行。
按照以下步骤定位机器人基坐标系:
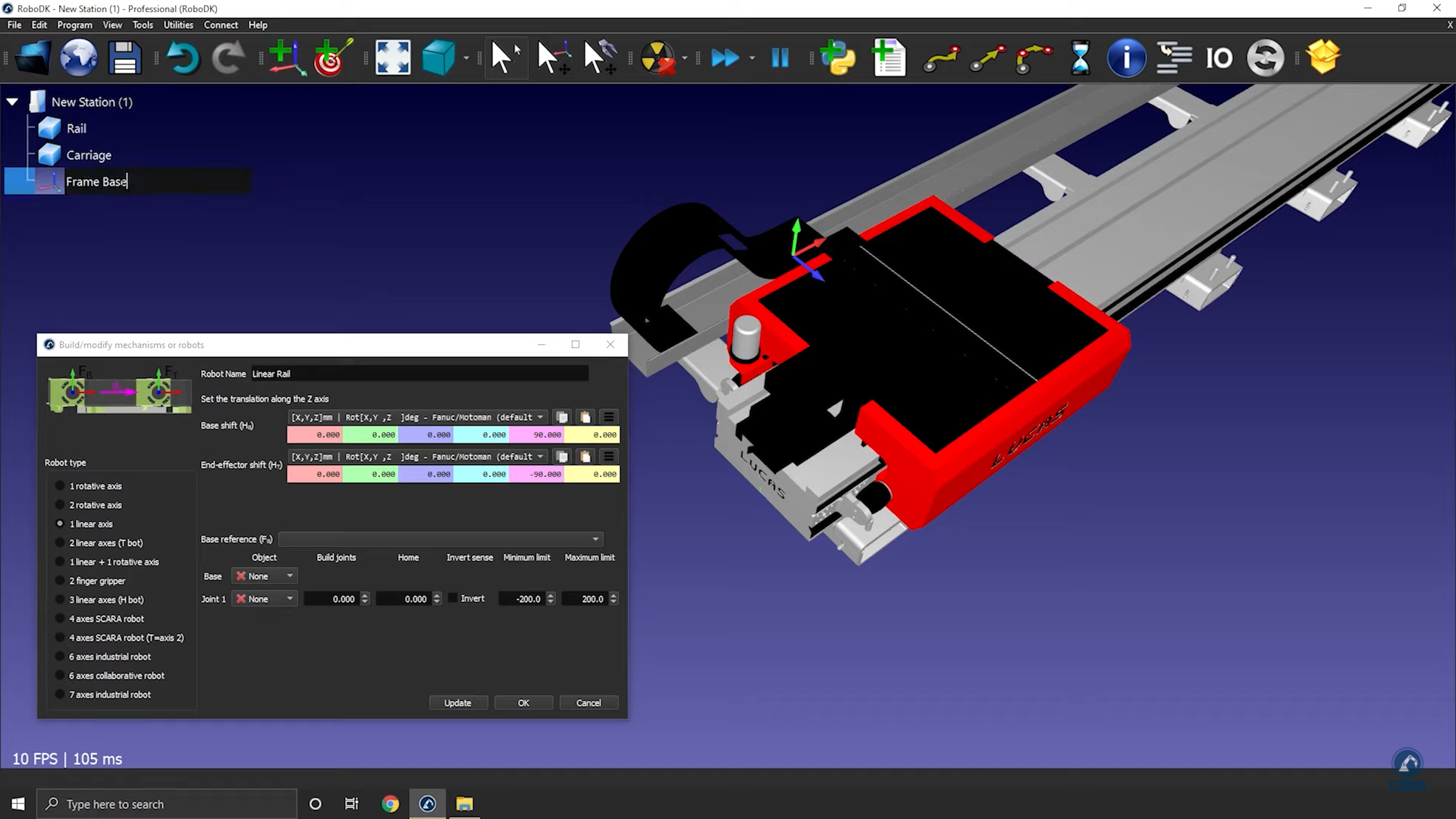
5.现在你已经加载了物体,再次打开模型机械结构生成器通过:实用程序➔建模结构或机器人。
6.你可以在该窗口的名称位置为机械结构重新命名。
7.考虑将基坐标系置于导轨的0位置:在此处创建一个参考坐标系,并将其命名为 "Frame Base"。
按照以下步骤调整基坐标系的位置:
8.选择工具➔测量。
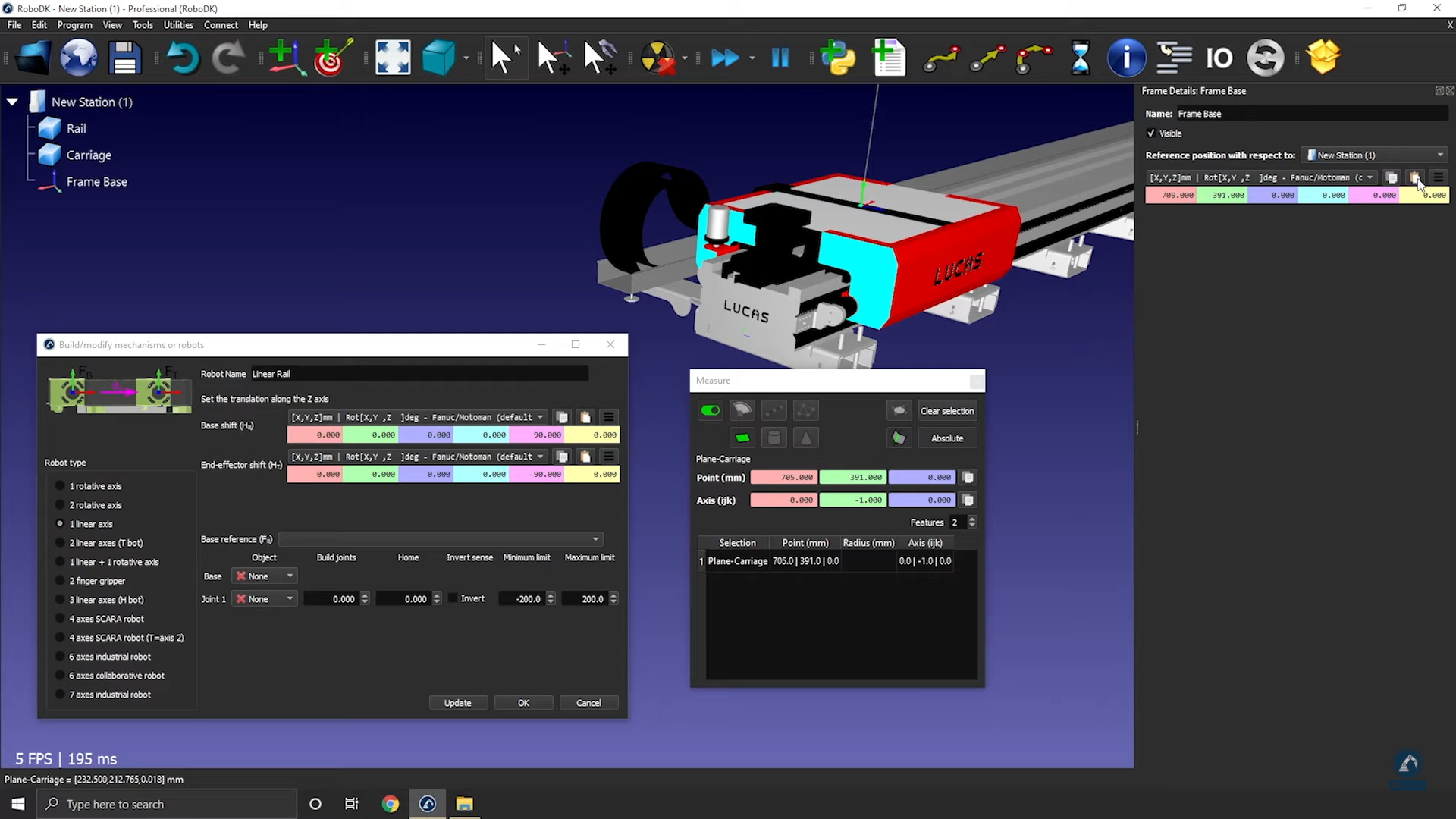
9.使用测量工具,根据下图所示的测量界面选择图标。
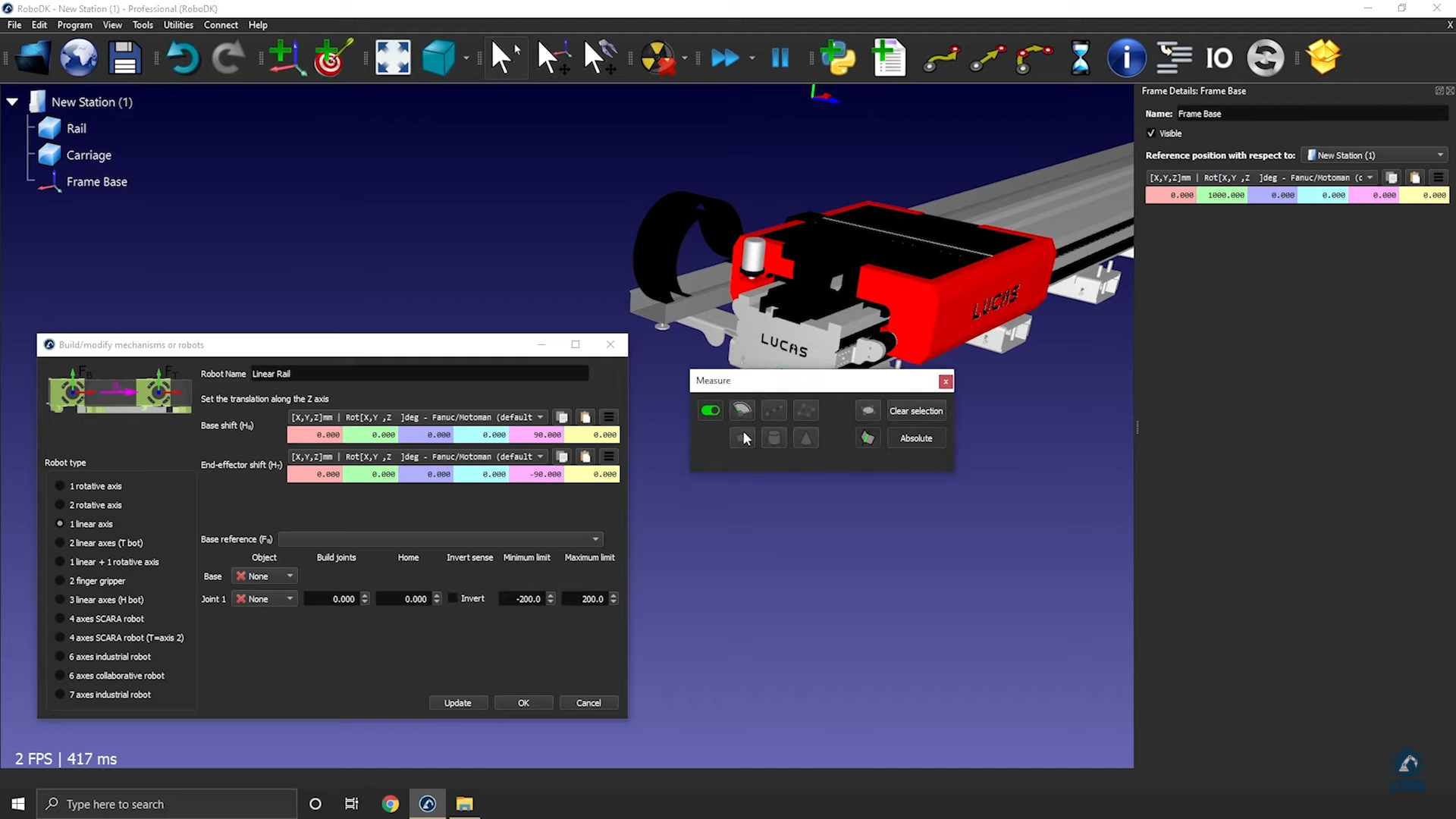
10.把值复制粘贴到Frame Base坐标系详情里(如下图所示)。
按照以下步骤检查方向并输入导轨长度:
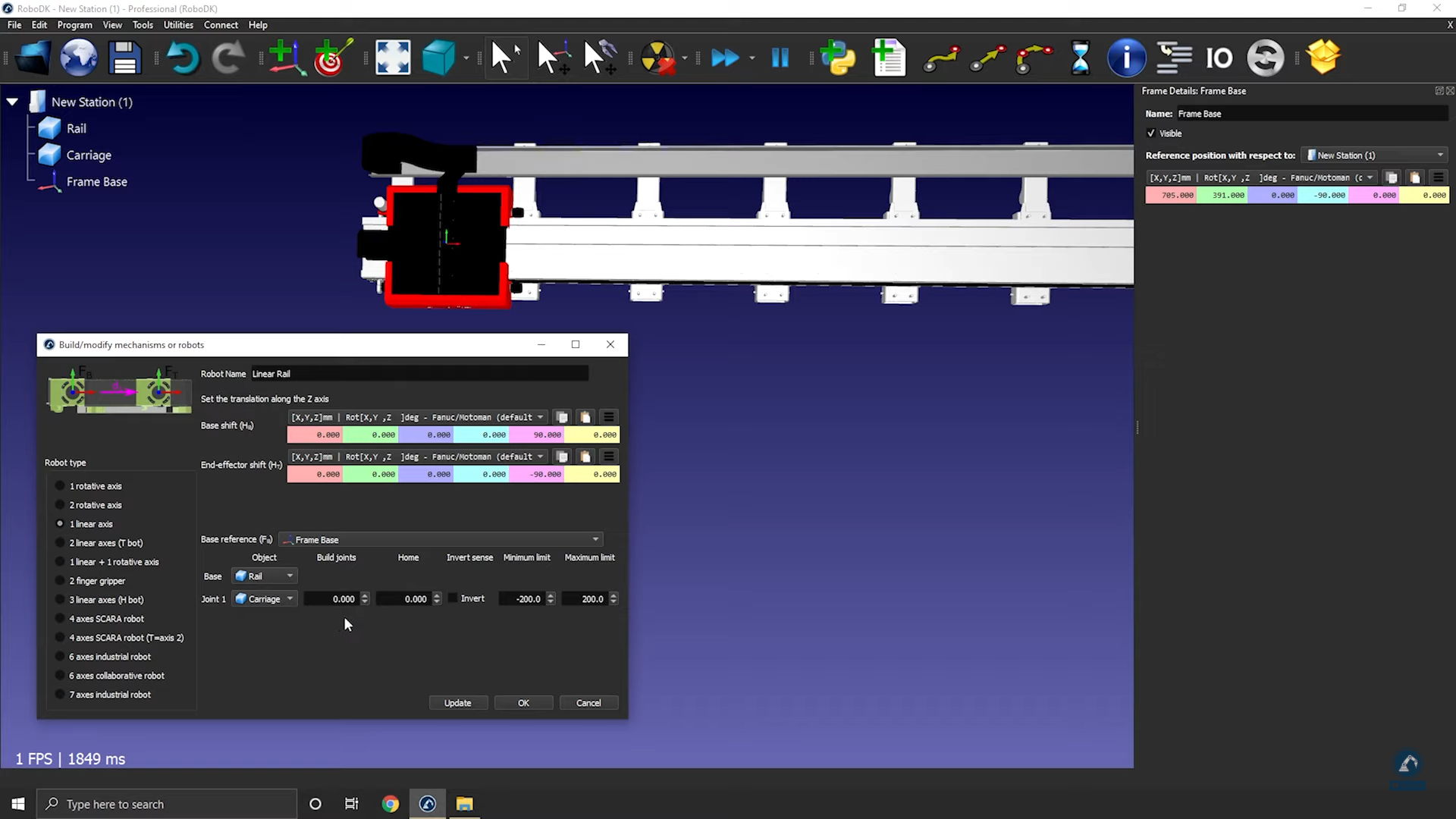
11.绕X轴顺时针旋转90度:在参考坐标系位置窗口中输入 -90.000度
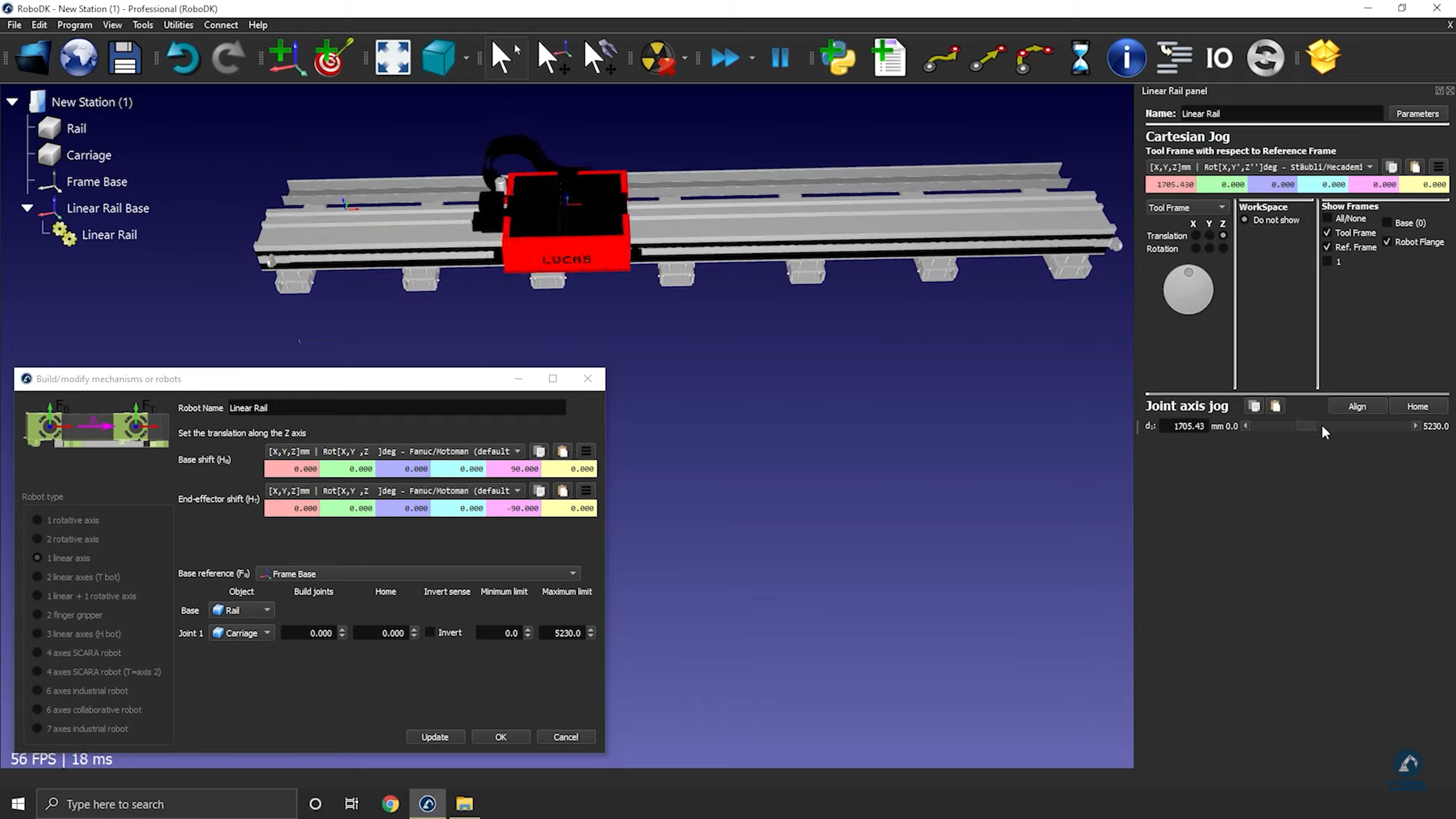
12.在模型机械结构窗口中输入轨道的长度(如下图所示)。
13.在建模窗口点击更新,即可创建机器人。
14.你可以通过“手动调节关节轴”测试轨道限位和移动方向是否符号预期。
15.核准无误后选择 "确定",完成建模。
如何建模2轴直线导轨
本示例展示了如何建模一个双轴线性导轨,也称为线性轴或线性轨道。线性轴用于扩展机器人手臂的工作范围。
Video:如何制作2轴直线导轨:https://www.youtube.com/watch?v=7_8yPS7SV2s
按照以下步骤导入3D模型:
1.将 3D 模型导入 RoboDK,将 STEP 文件拖放到工作站中。
2.打开机械结构生成器:实用程序➔建模结构或机器人。
3.下拉选项中选择:2个移动轴(T bot)"。
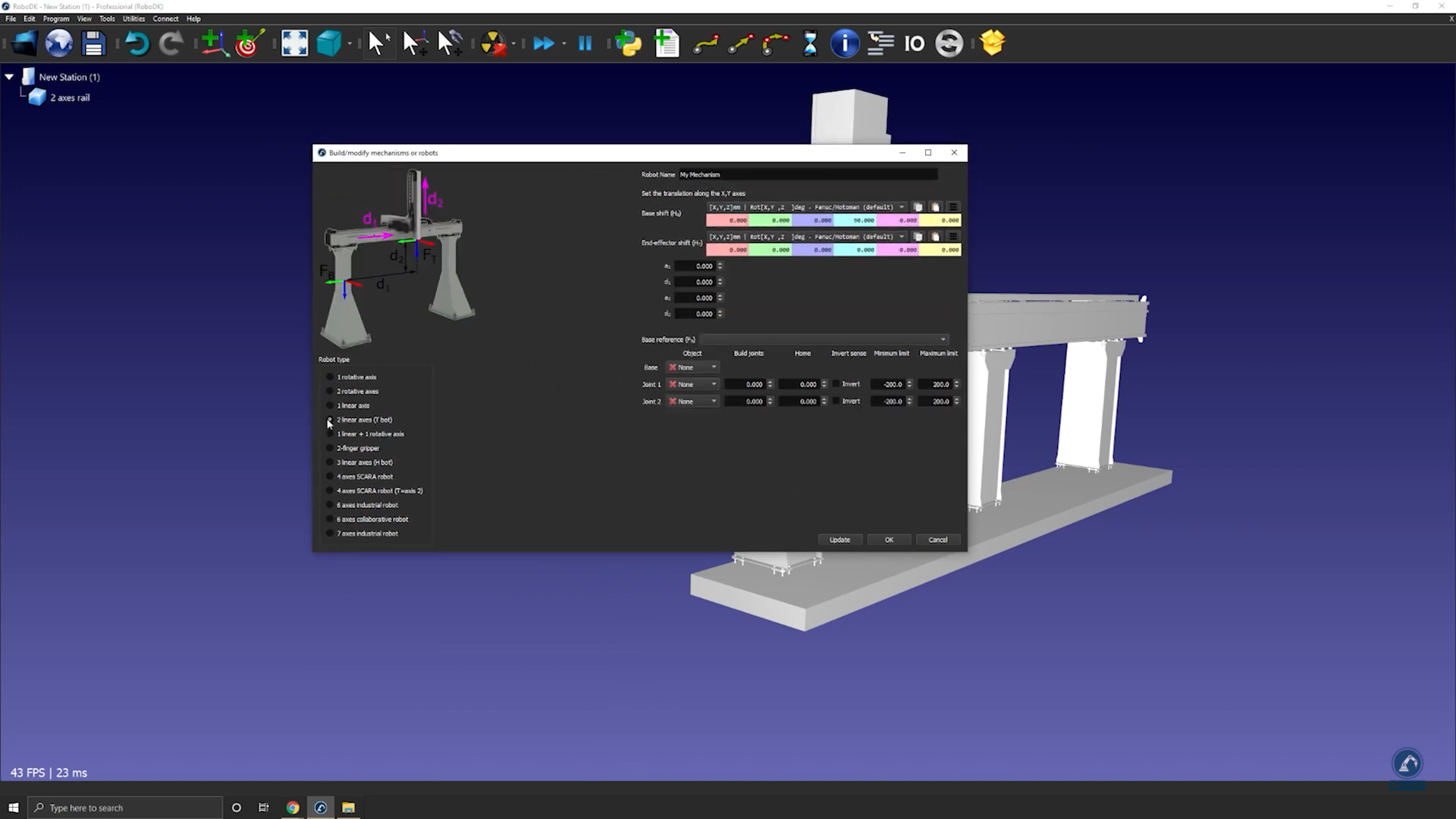
Note:基坐标系(FB)要位于工作站的原点。
Note:如果你需要将物体分割成多个(用于测量),如果你需要更改机械结构的颜色,请按照六轴机器人的建模步骤进行操作。
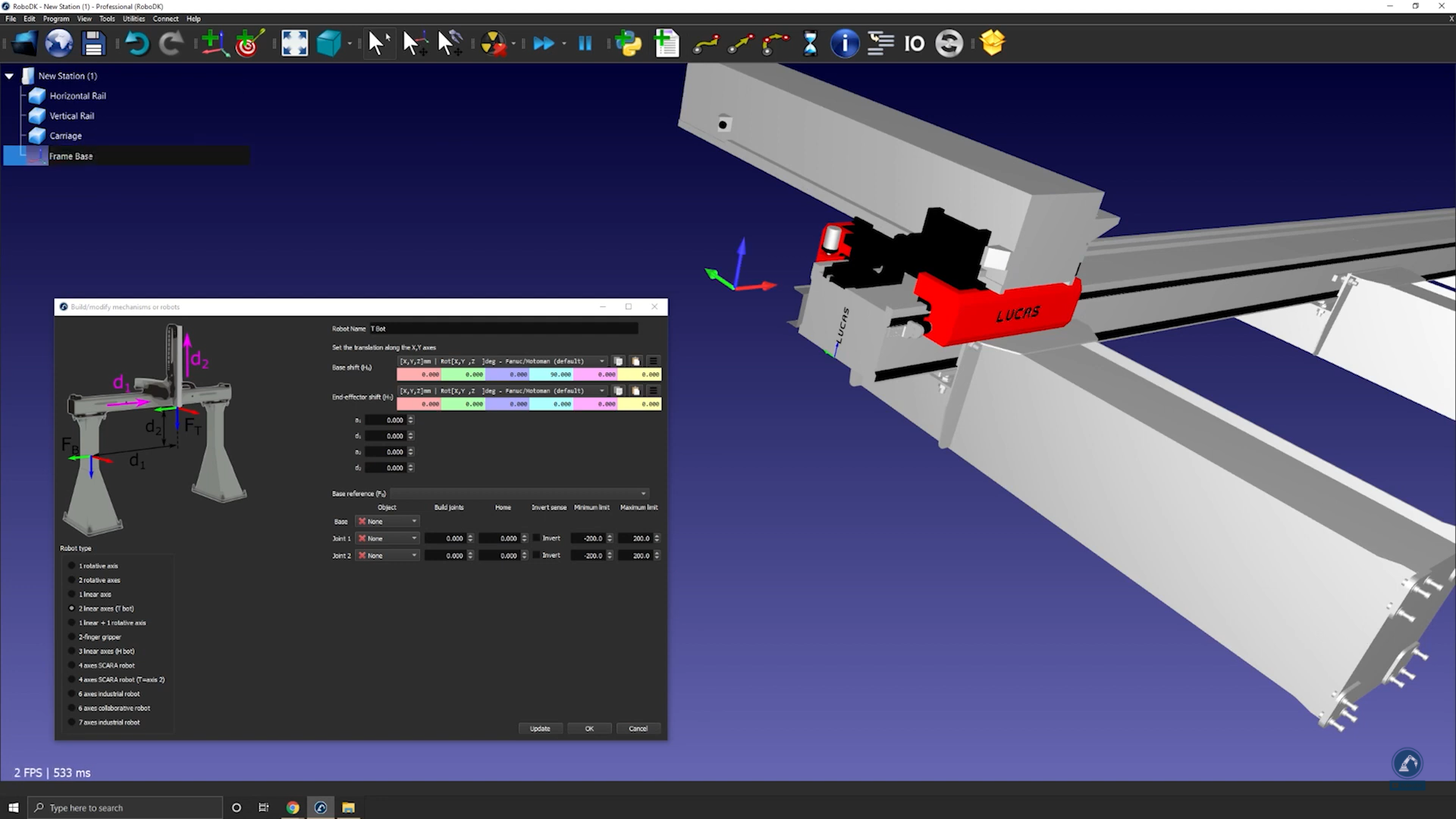
4.将模型分割成 3 块后,重新打开轨道生成器:选择实用程序➔建模结构或机器人。
5.选择选项:2个移动轴(T bot)。
6.将机械结构重命名为T-bot(在机器人名称下)。
按照以下步骤定位基坐标系的位置:
7.考虑基坐标系置于导轨的0位置:在此处创建一个参考坐标系,并将其命名为 "Frame Base"。
按照以下步骤调整基坐标系位置:
8.双击基坐标系,打开坐标系详情面板。
9.打开测量工具,测量表面中心的位置:工具➔ 测量。
10.在测量工具中点开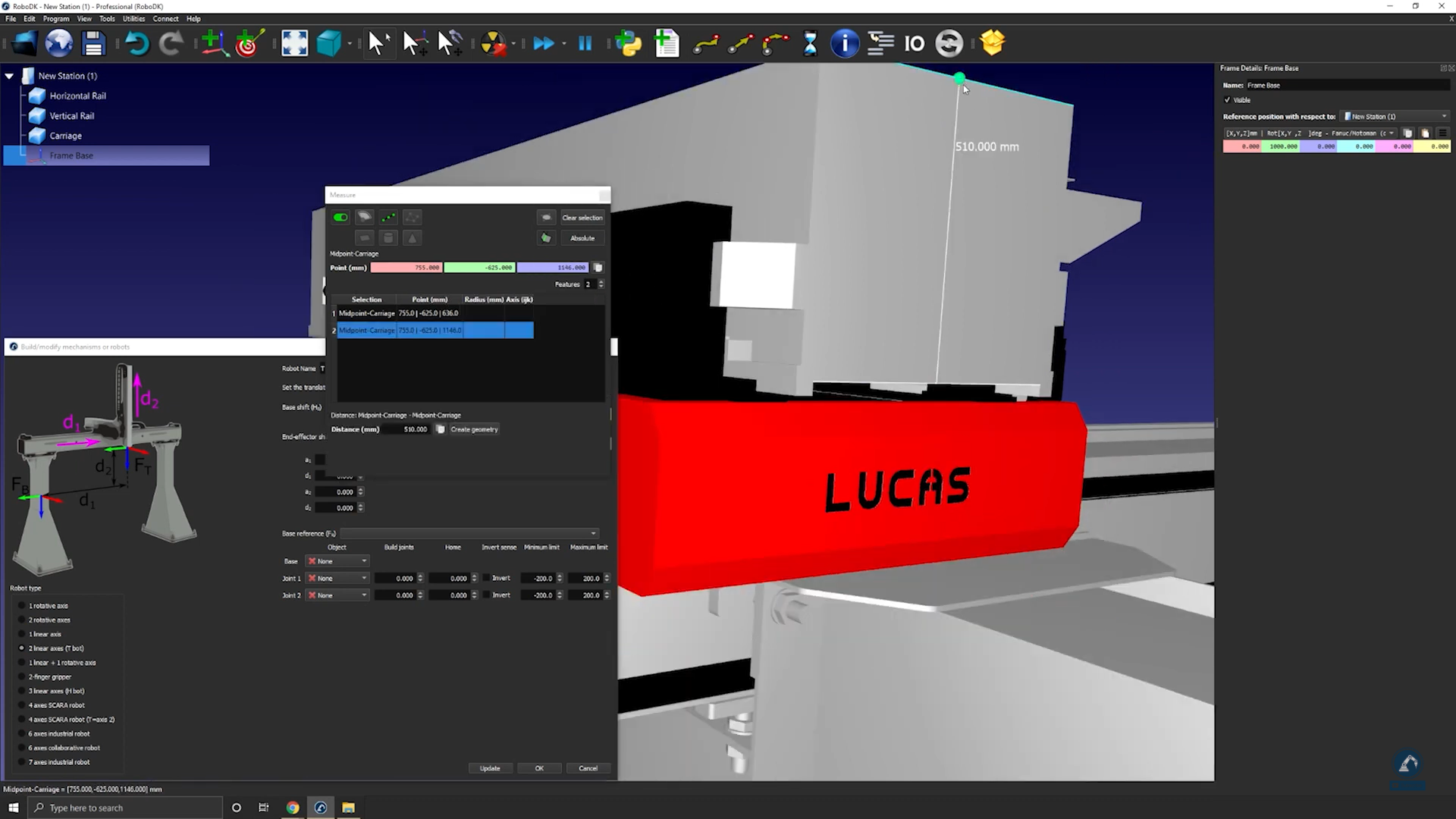
11.在 "测量 "窗口中选择 "创建几何体",在两点之间创建一条直线。
12.选择清除选择。
按照以下步骤测量两条线之间的中心点位置:
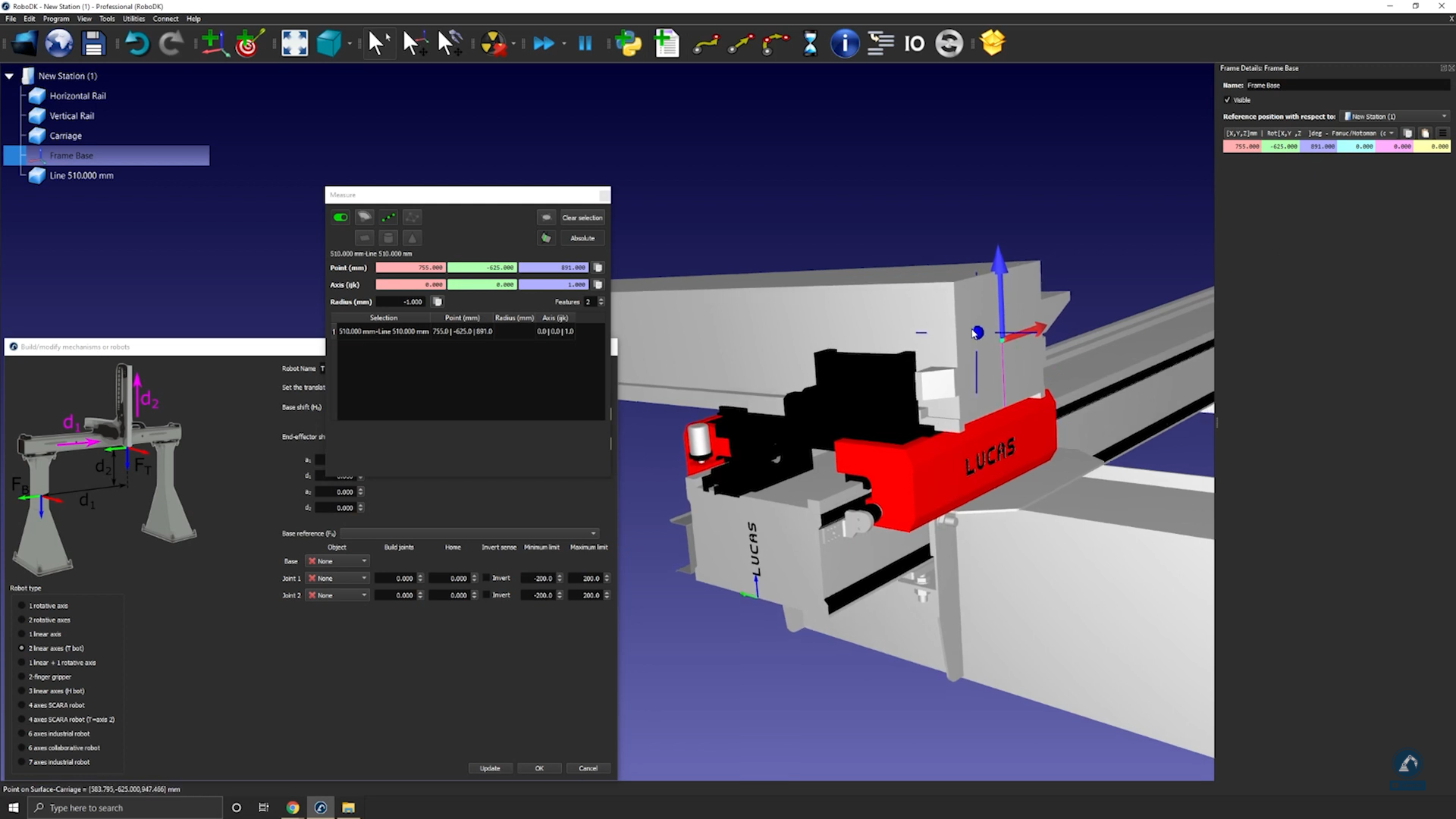
13.选择线条的中心点。
14.复制 "测量 "窗口中的数值,并将数值粘贴为坐标系位置(如下图所示)。
请按照以下步骤确保方向一致:
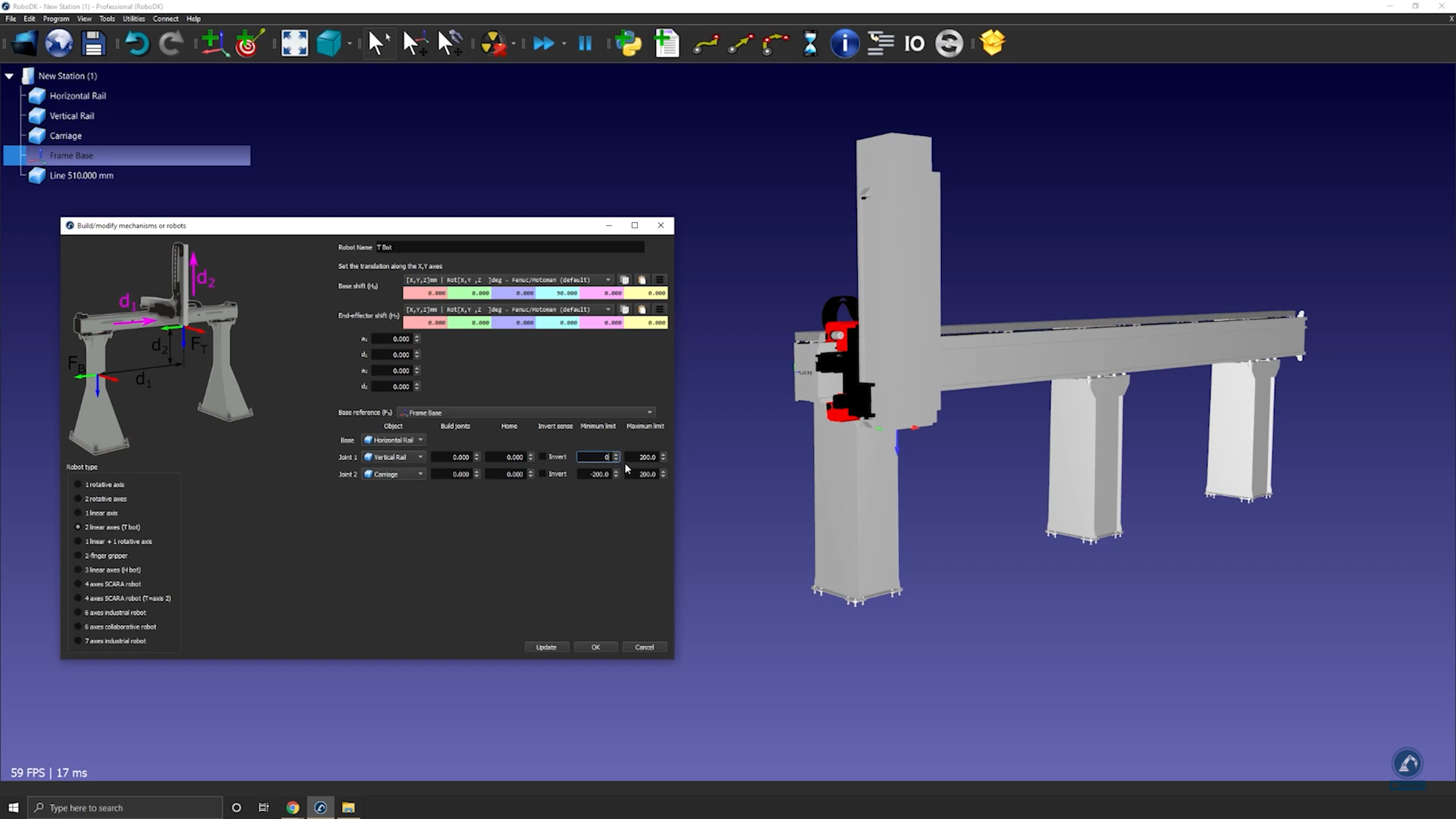
15.绕X轴逆时针旋转90度,然后绕Z轴旋转90度(如下图所示)
16.在"建模结构或机器人"窗口中输入导轨的测量值,如下图所示。
17.选择更新,创建机器人。
Note:你可以双击机器人,并手动调节关节轴,检查轴的运动方向是否正确,关节限位有无问题。
18.如果对结果满意,请在 "机械结构或机器人模型 "窗口中选择 "确定"。
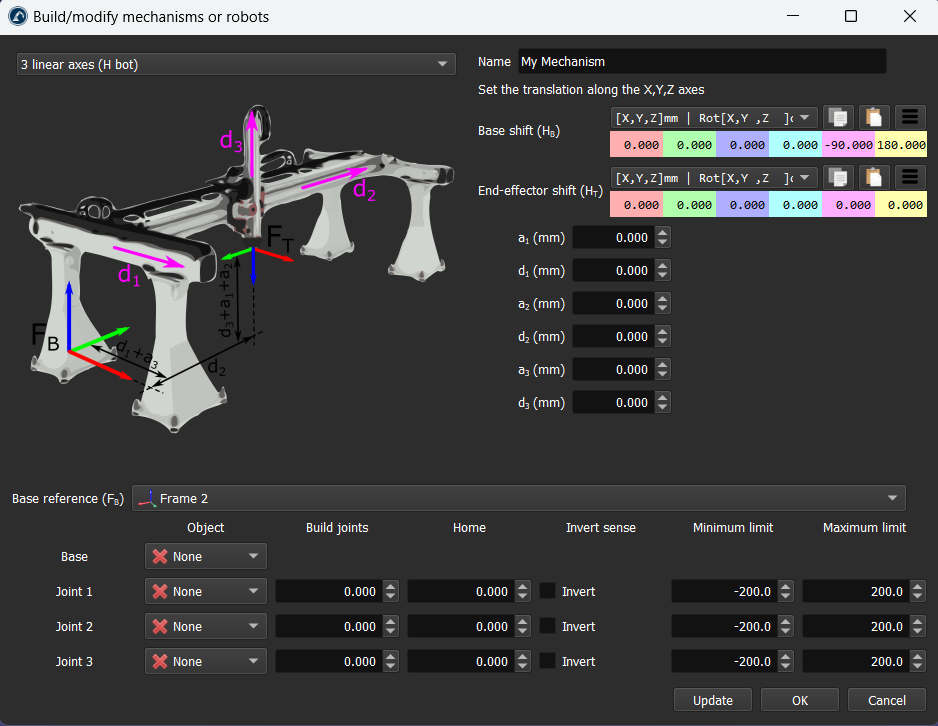
如何建模3轴机械装置
以下视频演示3轴机械装置(H-Bot结构)的建模方法。该机构可通过在外部轴向安装机械臂实现工作范围扩展。
Video:三轴机械装置的建模实现过程https://www.youtube.com/watch?v=L1wG93rRZS0
按照以下步骤导入3D模型:
1.在 RoboDK 中拖放 3D 模型(STEP 或 IGES 文件),将其加载到工作站中。
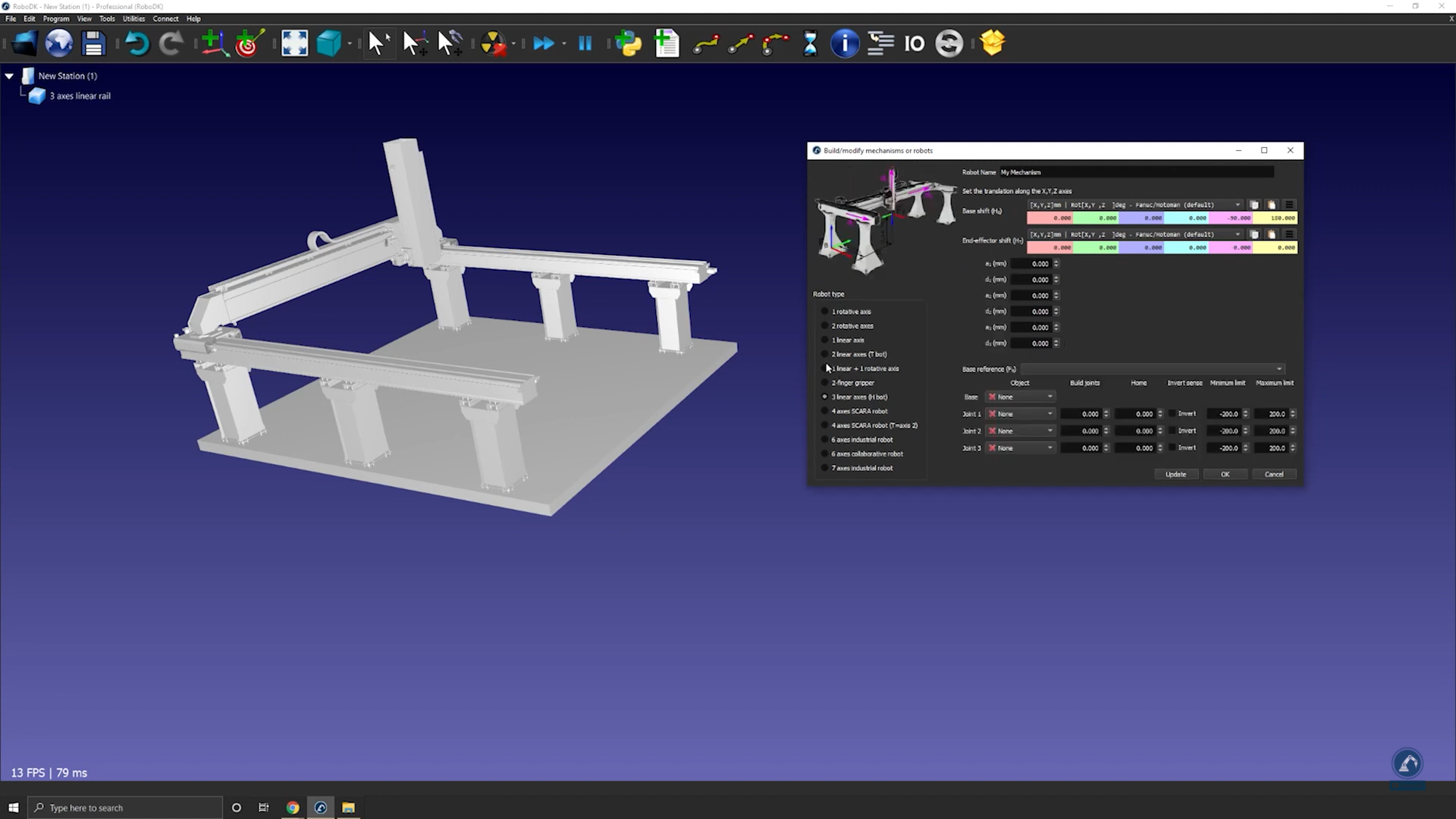
2.打开机械结构生成器:选择实用程序➔建模结构或机器人。
3.在下拉选项中选择:3个线性轴(H-bot)。
Note:基准坐标系(Fb)位于机械结构的 0.00 位置。
Note:当你需要将物体分割成多块,你可能需要改变机械结构的颜色,可以按照六轴机器人建模教程中的步骤进行操作。
按照以下步骤创建基坐标系:
4.当你把对象分割成不同部分后,需要重新打开机械结构生成器(通过点击实用程序➔建模结构或机器人➔ 3个线性轴(H-bot))。
5.你可以给机械结构命名为H-bot。
6.在轨道的 0 位置创建基坐标系,比如Frame Base。
按照以下步骤调整基坐标系的位置:
7.双击Frame Base,打开坐标系面板。
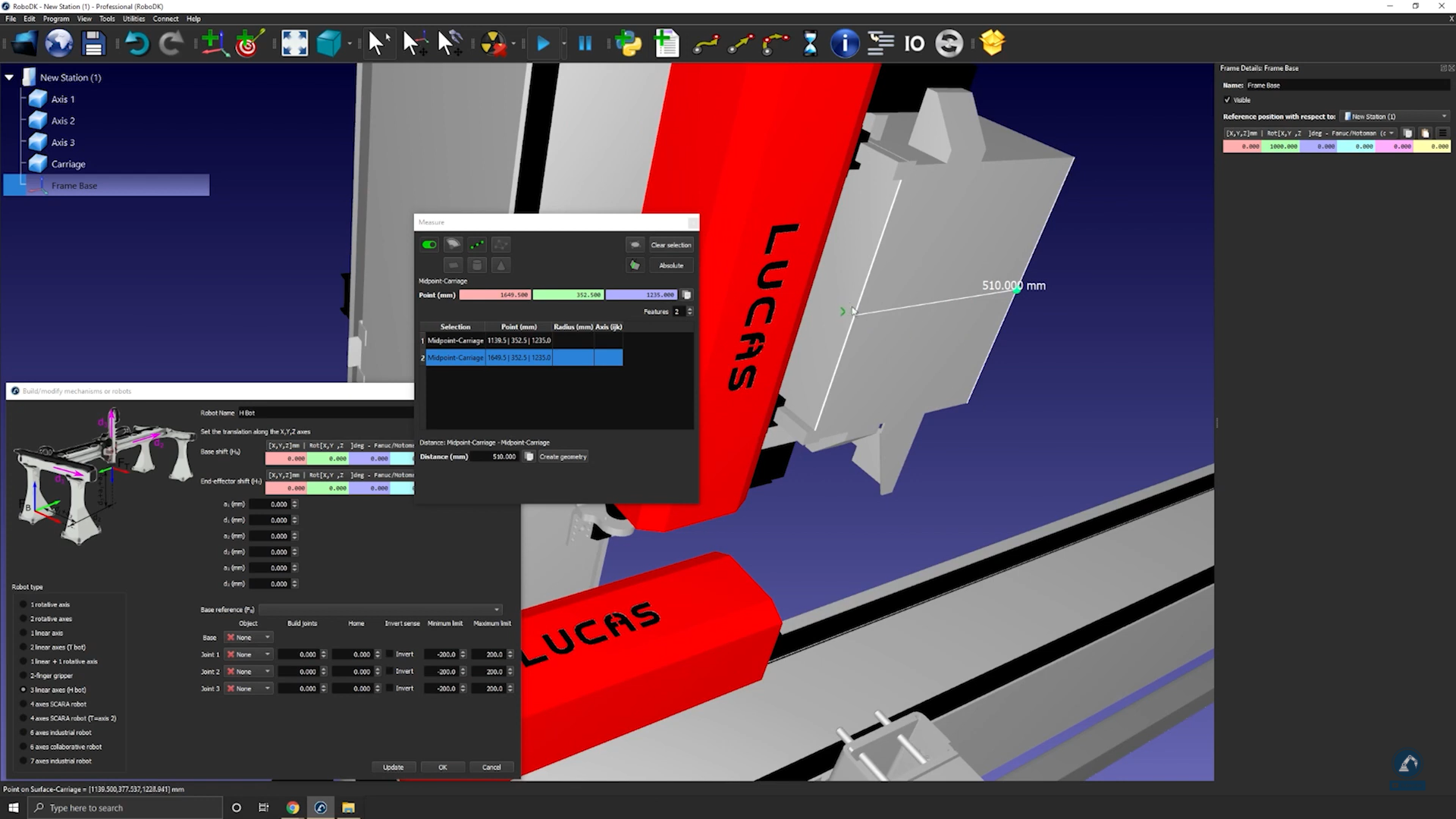
8.然后打开测量工具:工具➔ 测量。
9.在测量工具中点开
10.在测量窗口,点击创建几何按钮,此时会在两个中心点之间生成一条直线。
11.现在两个点之间的线已创建,你可以在测量窗口 "清除选择"。
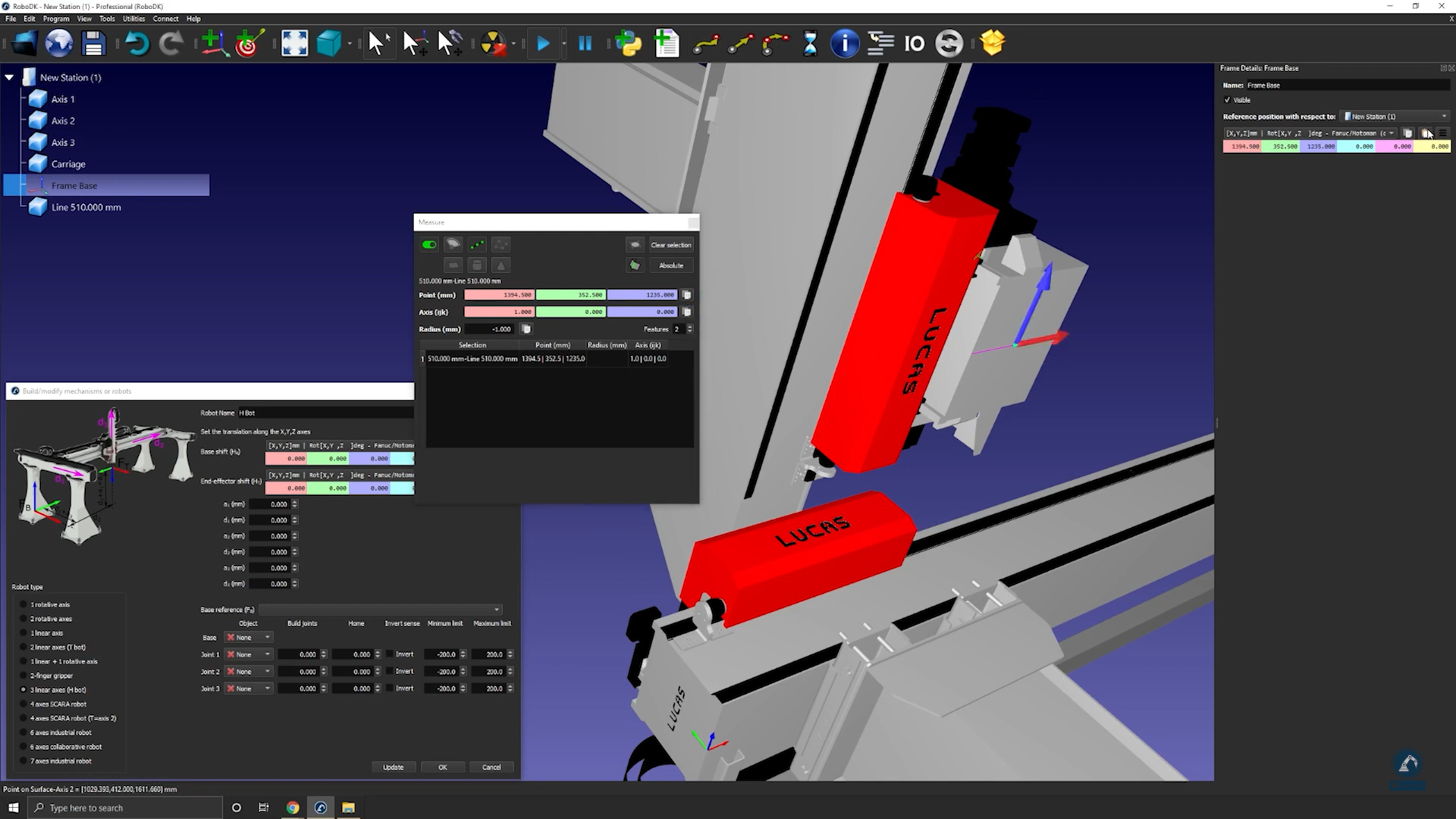
12.然后点击该直线的中心点,此点是新创建直线中心点。
13.复制数值并粘贴到基坐标系(如下图所示),确保坐标系位置与参考坐标系图像一致。
按照以下步骤确保方向一致:
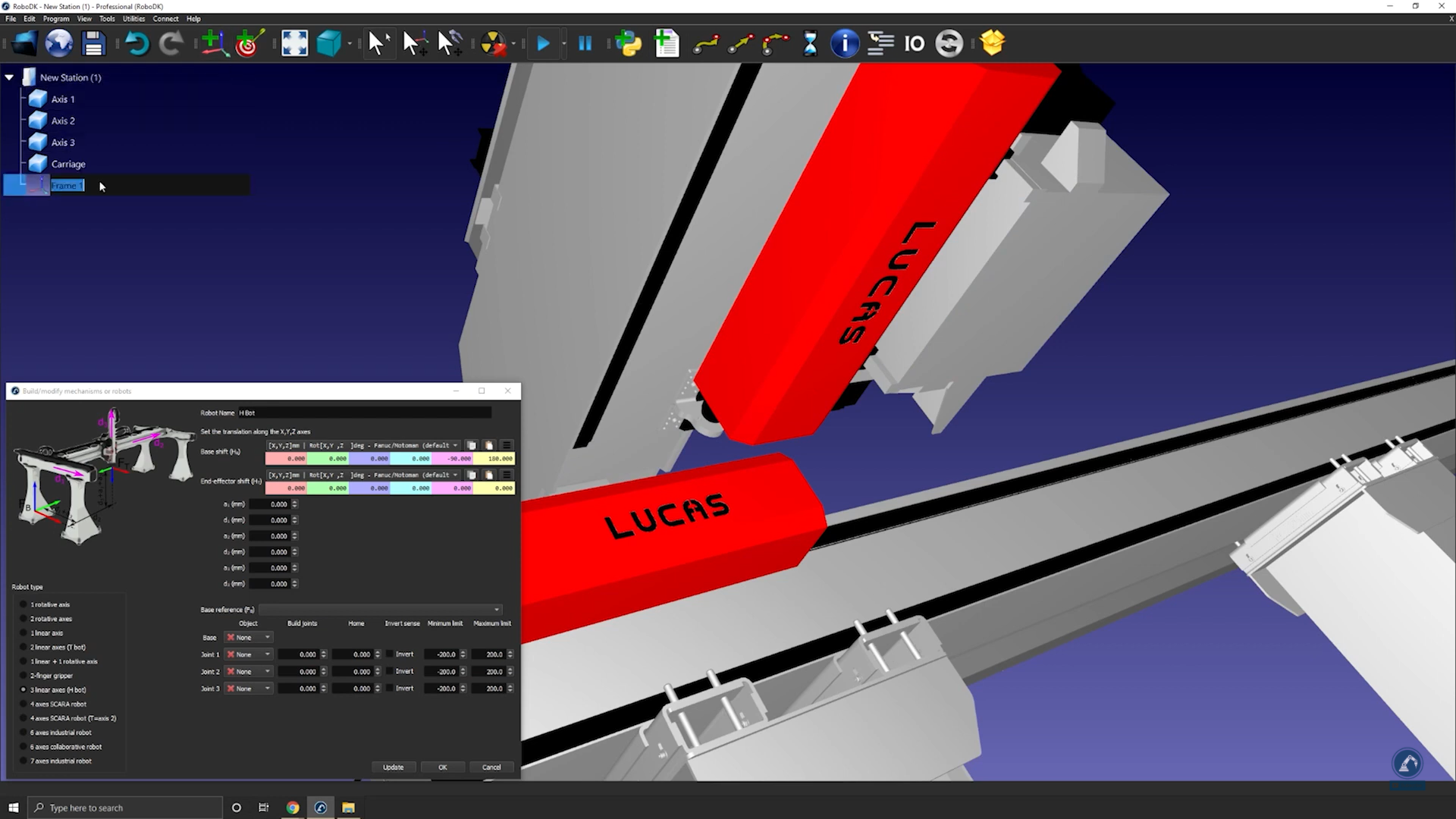
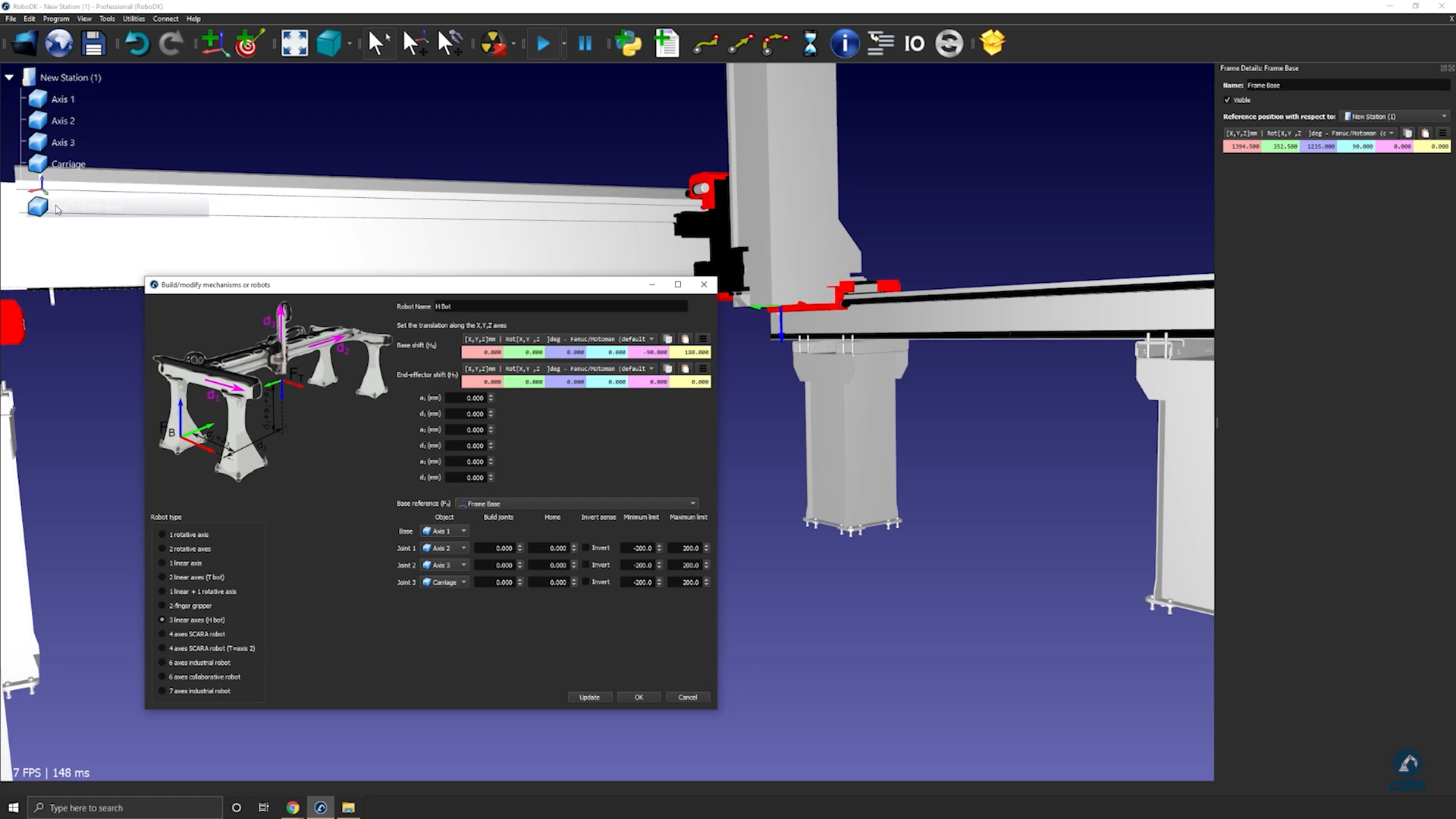
14.逆时针旋转90 度。
15.如下图所示,选择对应的坐标系,然后逐个为每个轴选择物体对象。
16.在该窗口输入每根导轨的长度。
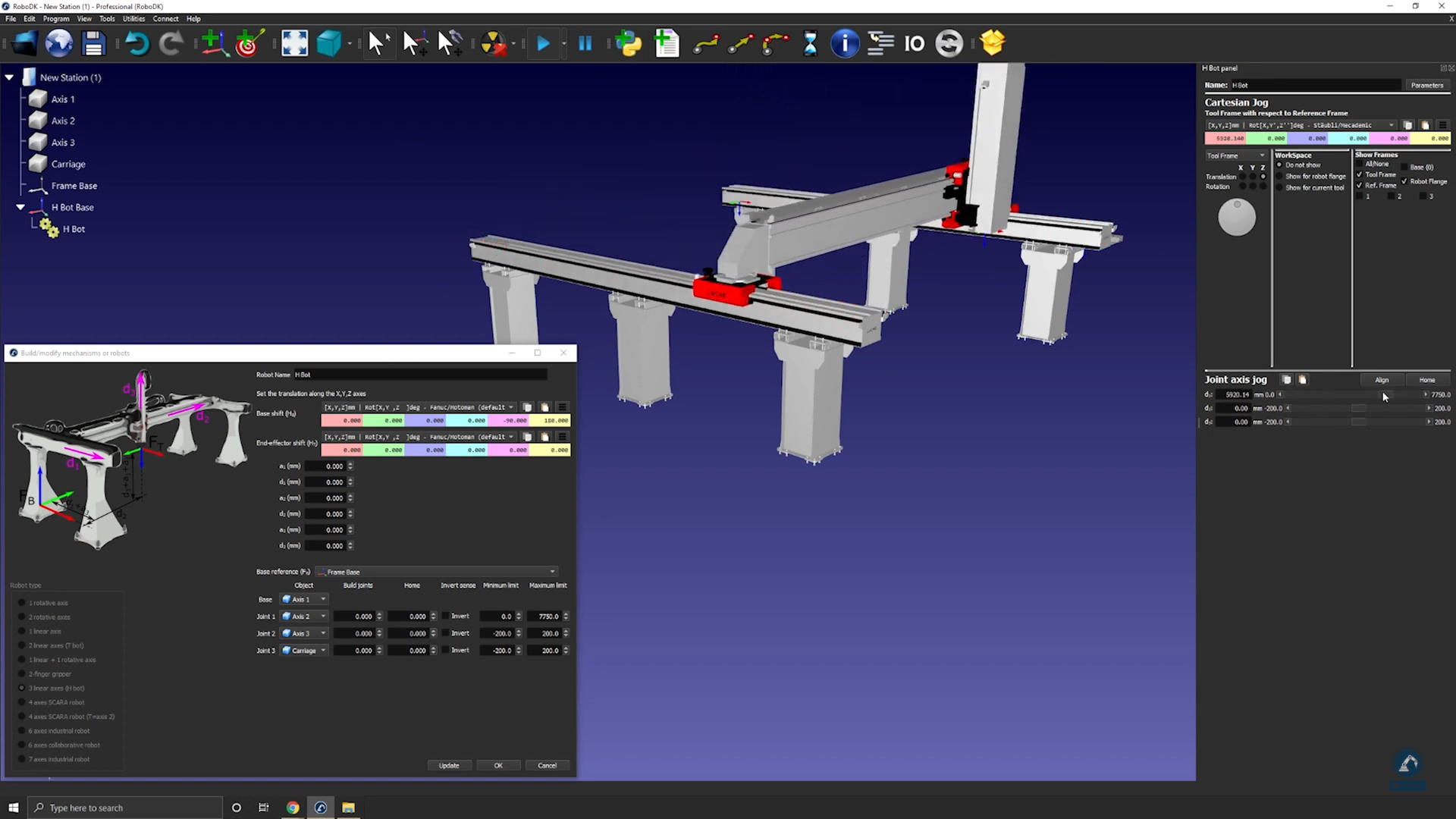
17.测试:在手动调节关节轴窗口滑动每个轴,确保每个轴滑动的范围符合预期。
18.测试完每个轴后,按 "更新 "键,即可创建机械结构了。
19.如果一切正常,此时选择确定,这个机械结构就完成了。
Note:如果轴未按预期方向移动,你可以在机械建模器中勾选每个轴的“反转”选项来调整角度。
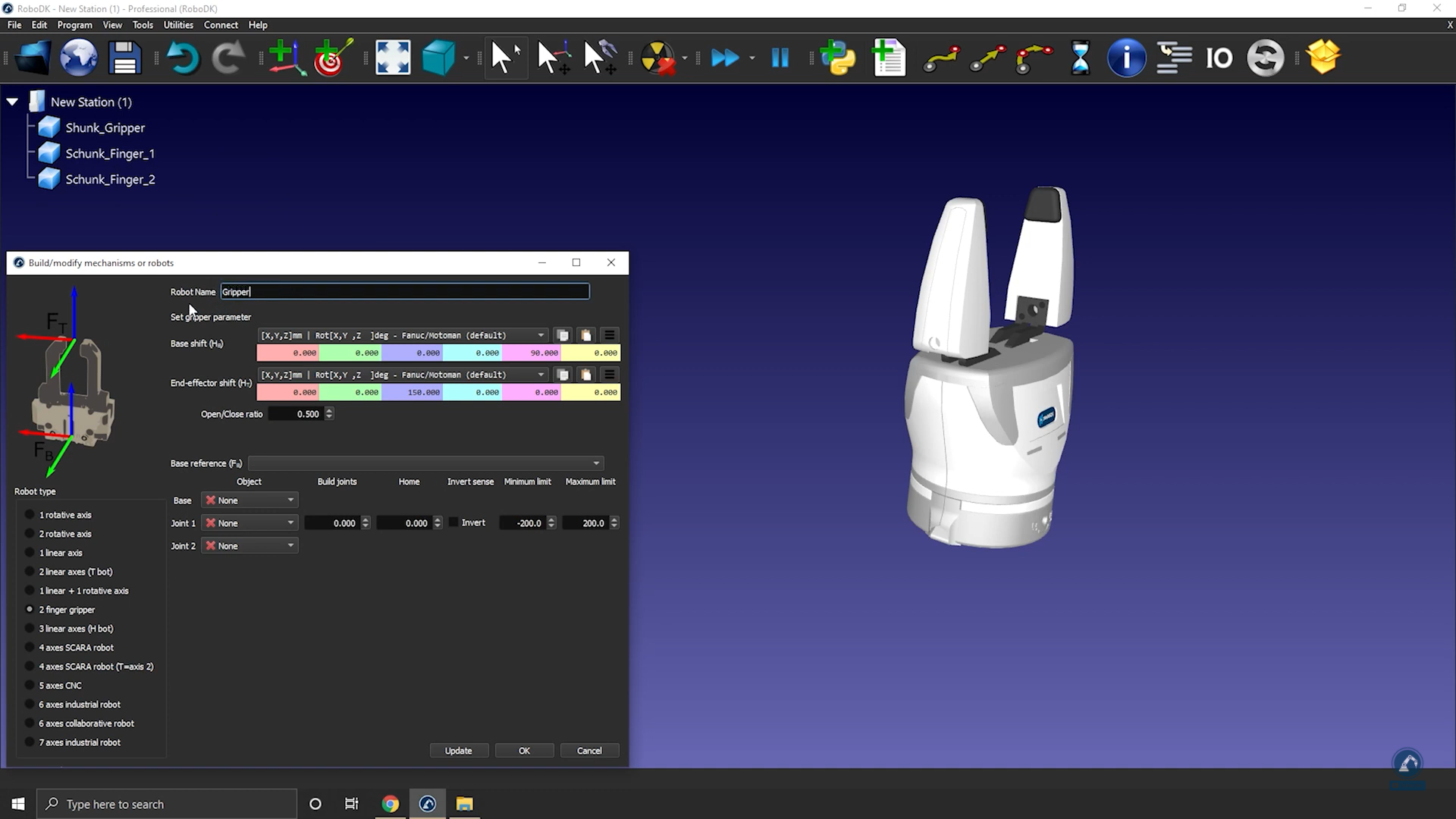
如何建模2指平行夹爪
通过"建模结构或机器人",你可以建模一个平行夹爪。平行夹爪也称为双指夹爪,可以让机器人抓取部件。
Video:如何制作双指夹爪:https://www.youtube.com/watch?v=kK4PRTjOZ48
按照以下步骤导入3D模型:
1.导入 3D 模型:拖放 STEP 文件将其载入工作站(IGES 或 STL 文件也可以)。
2.打开机械结构生成器:实用程序➔建模结构或机器人。
3.下拉选项中选择:2个抓手。
4.你可以给机器人命名为:2 finger gripper。
按照以下步骤调整坐标系:
5.创建参考坐标系,这里应位于夹爪下方,命名为:Frame Base。
6.确保刚才创建的坐标系根据图像定位:将参考坐标系调至 0.000 mm (X,Y,Z)。
Note:将夹爪手指置于原点(0 毫米)可以简化操作。如果希望零点位置是夹爪闭合的位置,则将手指向中间移动,直到手指相触。
7.在机械结构生成器窗口中输入夹爪的运动范围:如果将手指置于 0 位置,则最小限值为 0,最大限值为 80。
8.选择更新,此时会出现一个
9.双击
10.如果确认没问题,就可以在机械结构生成器窗口选择确定。
如何建模6轴机械臂
本示例展示了如何利用制造商提供的3D模型,从零开始为一个 6 轴工业机器人手臂建模。
Video:机械臂建模视频https://www.youtube.com/watch?v=-woD7T27hGQ
获取机器人模型:
1.你需要获取到原始的3D 模型(如 STEP 或 IGES 文件)。
2.你还需要找到机器人数据表或机器人手册。
打开机器人模型窗口:
3.在菜单栏选择:实用程序➔ 建模结构或机器人。
4.在下拉选项中选择:6 轴工业机器人。
通过以下操作将机器人3D 文件加载到 RoboDK 中:
5.通过点击文件的方式打开机器人,或者拖放到工作站的模式。
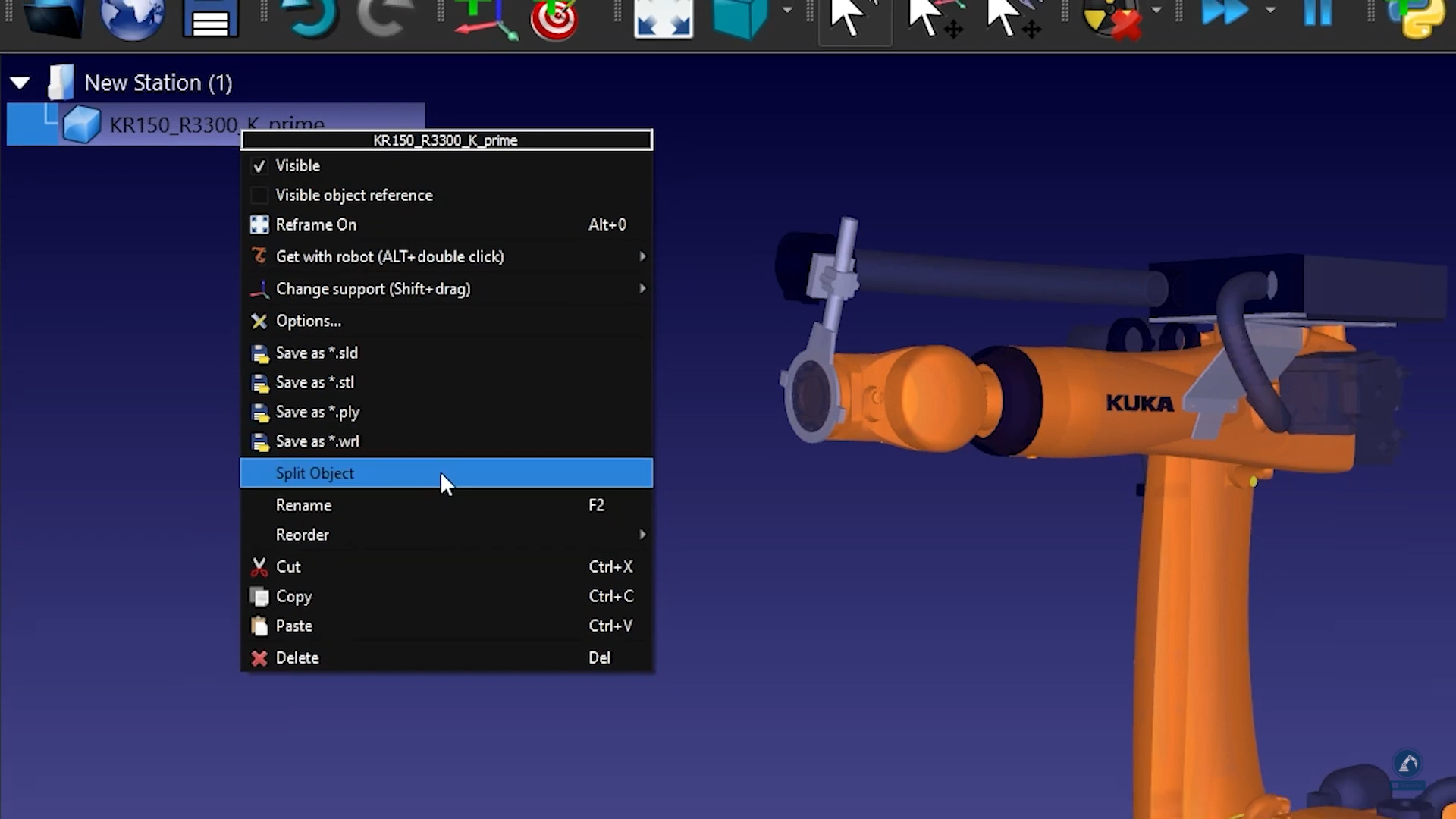
Note:有些 STEP 文件在加载时没有颜色,例如,如果你加载的是库卡(Kuka)机器人,它应该是橙色而不是灰色)。在这种情况下,你可以通过选择工具➔ 改变颜色完成变色。你也可以点击机器人的各个部分,选择 "移除",将颜色移除。
请按照以下步骤将物体分割成不同的片段,这样我们就可以分别处理每个片段:
6.如果你下载的 CAD 文件是单个物体,你可以右键点击物体,选择分离物体来取消对物体(STEP 文件)的分组。
7.然后,你可以将其重新组合,制作出机器人的不同部件。
请按照以下步骤在 RoboDK 中输入机器人运动学信息:
8.在 "机器人名称 "中输入机器人名称。
9.如果你的机器人部件顺序正确,那么所有 3D 模型都应正确填充。否则,你可以手动将每个物体链接到正确的机器人关节。
10.打开数据表,填写机器人的尺寸。
11.在数据表的 3D 草图上,你可以找到所需的所有值。在 RoboDK 中填写正确的值。
12.如果一切正常后,在窗口选择:更新。
Note: 使用机器人面板逐个移动关节,以确保你输入的测量值正确无误。
如何将机器人关节耦合在一起
有些机器人的两个关节耦合在一起,这意味着机器人的两个关节是相依的。例如,发那科(Fanuc)机器人的关节 2 和关节 3 联在一起。
请按照以下步骤在 RoboDK 中连接机器人的关节:
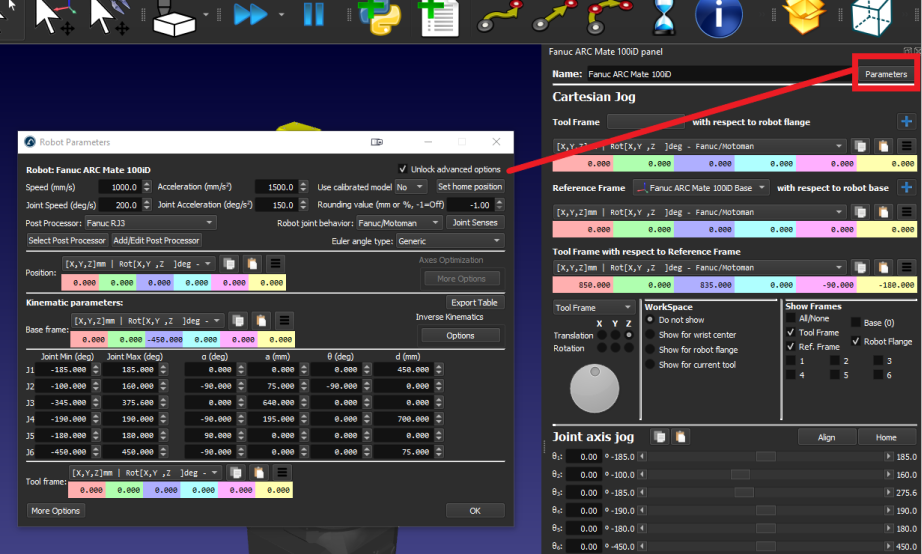
1.首先,双击机器人,打开机器人面板。
2.点击机器人名称旁"参数"选项卡。
3.勾选解锁高级选项。
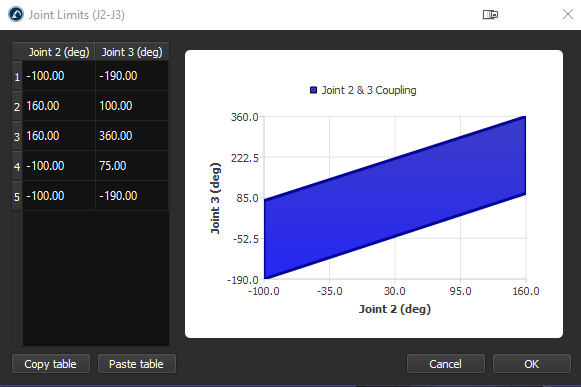
4.在机器人参数窗口,点击关节方向,此时会打开关节轴方向的选项卡。前6个数值代表关节的旋转方向,最后一个数值是关节2和3的耦合。将第7个数值改为-1以连接关节。此时会弹出一个带有耦合关节限制多边形的新选项卡,你可以编辑这些限制,以防止机器人发生自碰撞。
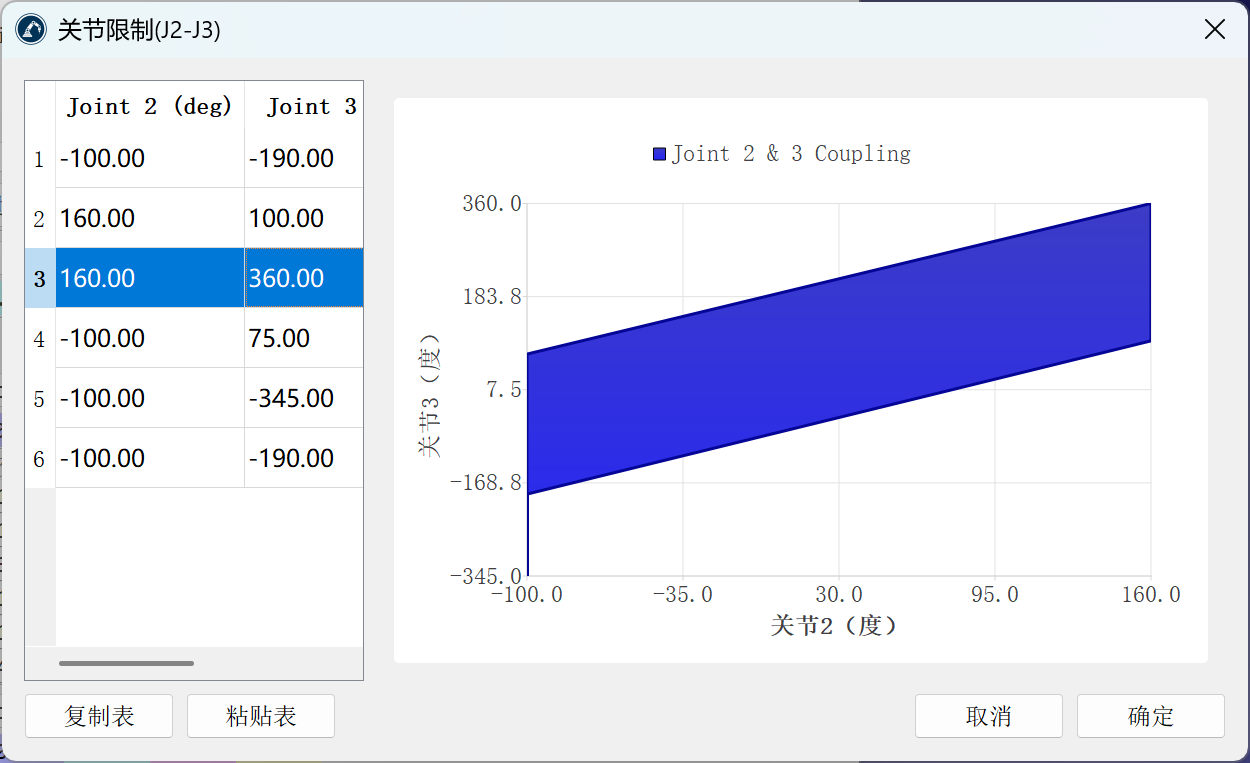
Note:耦合关节将使关节2和3一起移动,将值改为1而不是-1将反转关节的耦合方向。