本节介绍如何根据物体自身的几何特征对齐其参考坐标系(即调整坐标系位置和方向),使其与真实场景中的实际位置匹配。
Note:如果物体的参考坐标系已位于机器人TCP可探测的位置,则无需执行此流程。
操作步骤:
1.导入3D物体模型到工作站内。
2.选中
3.选择程序➔
确保后续参考坐标系是归属在根目录下。
4.右键点击:参考坐标系,在菜单中选择
流程与前一节定义参考系类似,但需选择虚拟物体上的几何点(而非真实物体上的点)。
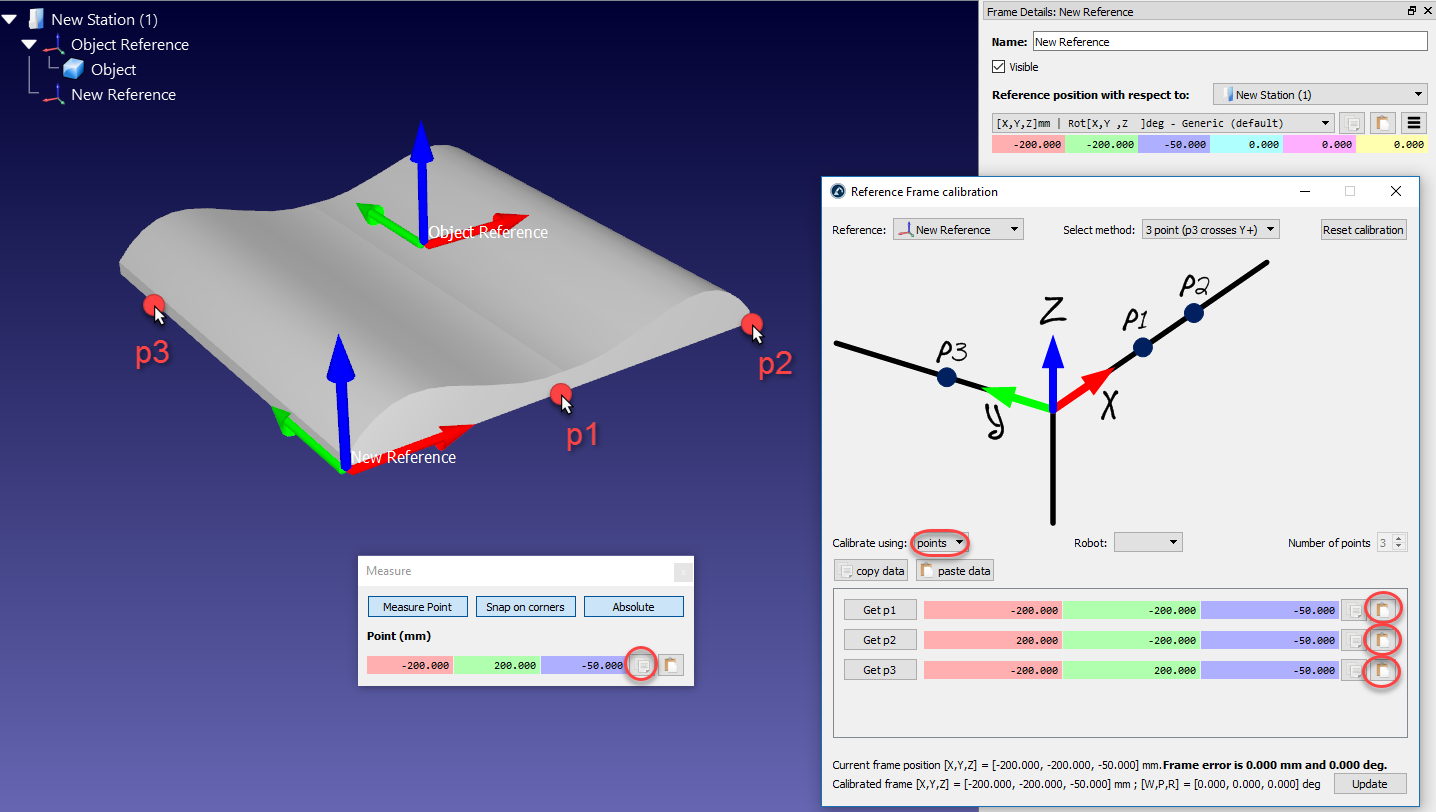
5.选择校准方法。
例如选择:3点(P3指向Y+)。
6.在参考坐标系的定义窗口,校准使用下拉选择:点位。
7.在主菜单中选择工具➔ 测量,打开测量工具。
8.在测量工具中打开"绝对"按钮,确保点位基于工作站坐标系(绝对基准)测量。
9.在物体上选择3 个点,并将其输入参考坐标系的定义窗口。
Tip:你可以使用复制/粘贴按钮,简化输入XYZ坐标的数值。
10.选择更新。参考坐标系将自动定位至目标位置。
11.右键点物体,选择:改变坐标系(按住Shift+拖动)。然后选择New Reference。物体绝对位置不变,但其相对于新坐标系的相对位置将被明确定义。
12.将新参考坐标系拖放至机器人基准坐标系下,即可开始离线编程操作。
Important:必须将参考坐标系直接连接到站点根部,以便我们能够使用测量工具进行绝对测量。
Tip:在一侧新建一个工作站点击:文件➔新建工作站,并单独将对象与参考坐标系对齐可能更容易。然后,仅将对象复制/粘贴到主RoboDK工作站中。