机器人对齐坐标系
本节介绍如何通过共享同一参考坐标系,实现多台机器人的离线协同编程。
在典型的离线编程应用中,物体位置通常基于单台机器人坐标系进行调整。但当多台机器人协同作业时,必须将所有机器人坐标系统一到同一参考基准(如工具坐标系或公共参考系)。
对齐多台机器人参考坐标系的操作步骤:
1.确保各机器人参考系与工具参考系独立。若存在依赖关系,需将所有参考系拖拽到根工作站下方。
2.为每台机器人基坐标系添加新参考系(比如Real Ref. A 和 Real Ref.B),用于表示工具相对于各机器人的实际位置。
3.分别校准这些参考系(使用校准参考系校准流程,例如3点法)
此时会看到三个参考系(工具参考系、机器人A或B真实参考系)本应重合,但因校准误差未对齐:
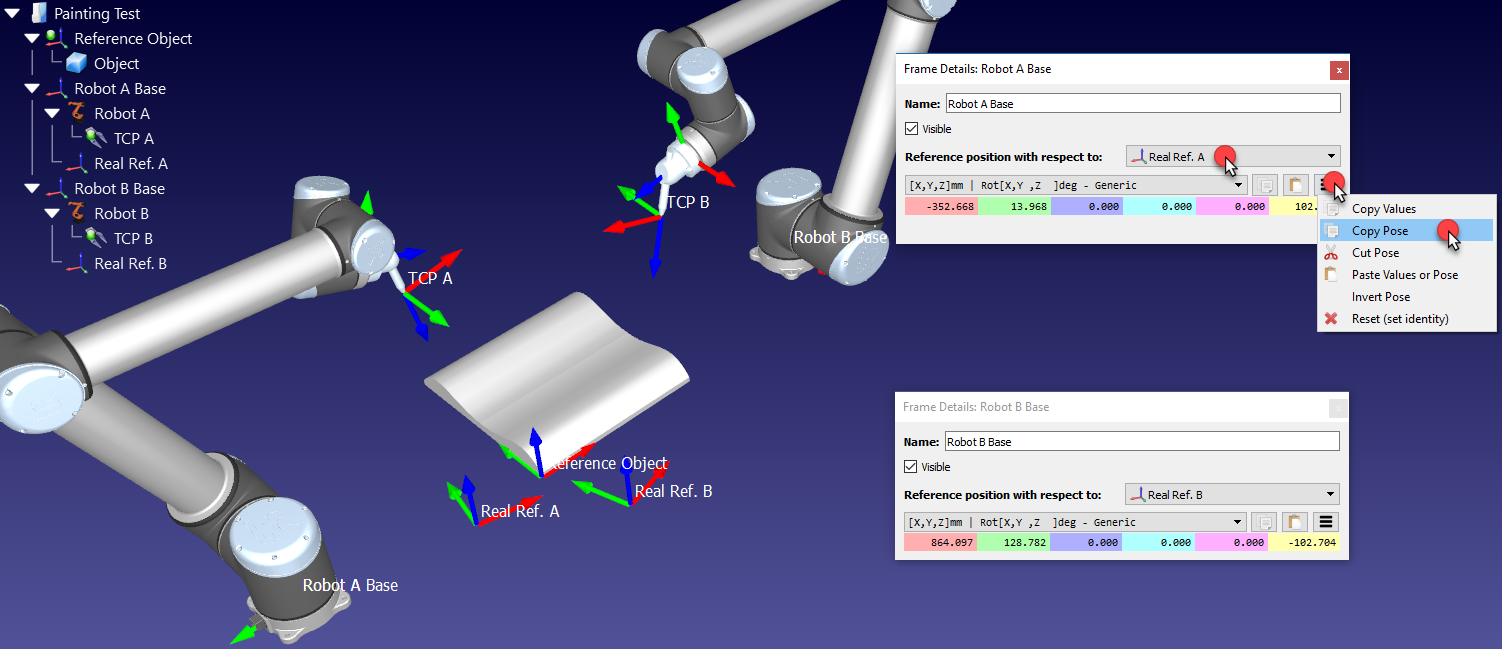
4.双击机器人基坐标系(如Robot A Base),打开参考系坐标详情窗口。
5.复制该机器人基坐标系相对于其真实参考系(Real Ref. A)的姿态,也可以点击复制按钮。
6.继续在该窗口中,将参考系的位置相对于选择为Reference Object参考系。
7.粘贴复制的坐标值。机器人基坐标系将移动,使Real Ref. A与Reference Object完全重合。
8.重复步骤4-7,对齐其他机器人的参考系
完成上述步骤后,所有机器人参考系将与Reference Object匹配,确保协同作业的一致性。