同步外部轴
该功能是指将机器人手臂与外部附加轴进行同步控制。外部轴既可单独用作定位装置,也能与机器人控制器同步联动。同步后,机器人本体与外部轴可同时运动,并保持相对于坐标系的高精度线性运动。
Note:并非所有机器人控制器都支持本体与外部轴同步运动。若控制器不支持,请勿强行同步,但仍可将外部轴作为定位装置使用。
通过RoboDK,最多可为任意机器人同步6个附加轴(6轴机器人+6附加轴=12轴系统)。
操作步骤:
1.从库中加载外部轴模型,或通过建模结构或机器人建模。
2.构建RoboDK 工作站:将机器人与外部轴/机构置于实际布局位置。
Note:使用直线导轨时,需在树形结构中使机器人嵌套于导轨下,如下图所示。
Tip:可通过添加参考坐标系实现对象间的相对定位。
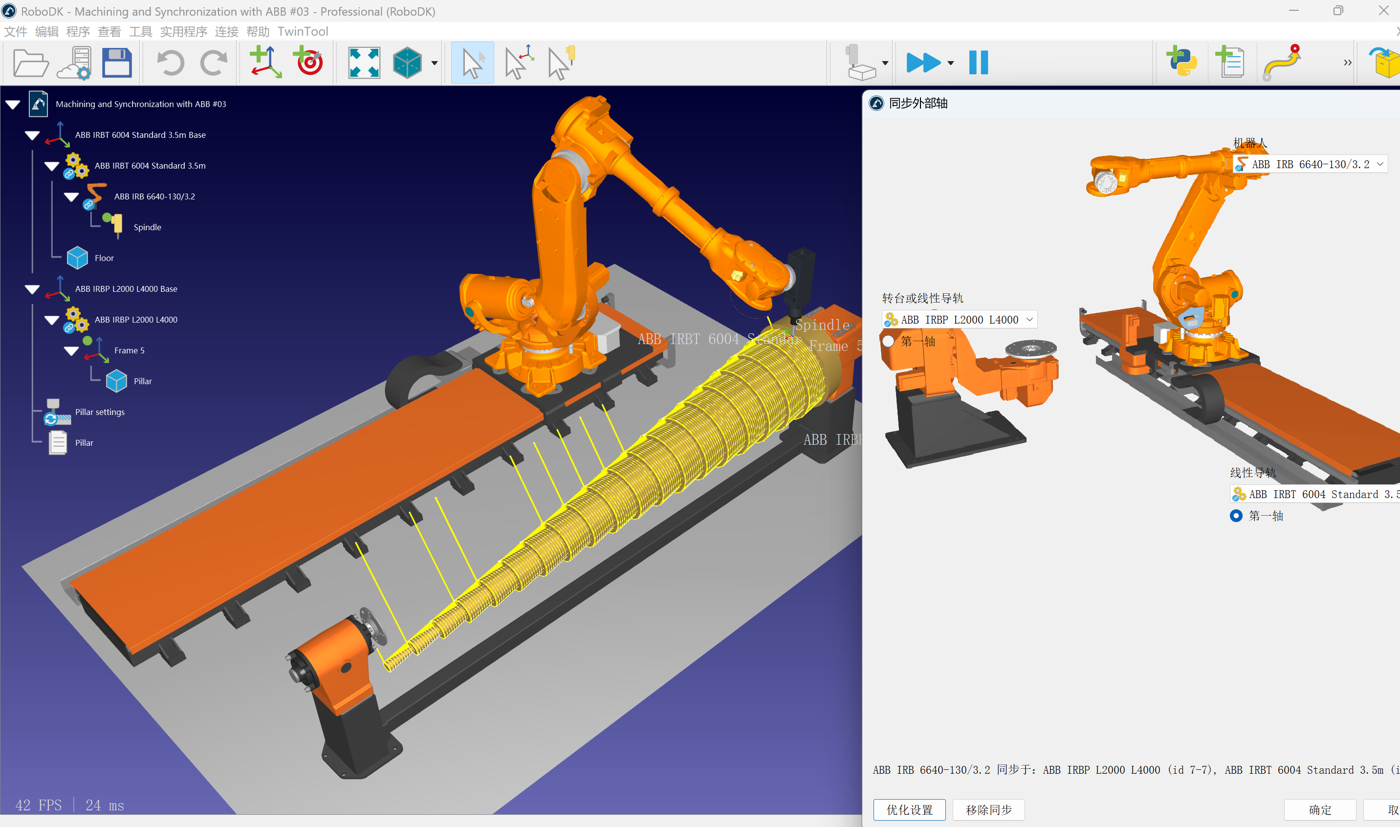
3.在菜单栏选择:实用程序➔ 同步外部轴。
4.选择机器人后,可用转台/直线导轨将显示为可同步状态。
5.选择 "确定"后,机器人控制面板将显示蓝色标记的附加轴。
同步机器人的目标点会以蓝色显示附加关节值。生成程序时可指定定位装置的优选位置,笛卡尔目标点将在路径运动中保持既定坐标位置。
机器人加工设置中会显示外部轴优选位置选项,且后处理器导出的每个运动指令都将包含外部轴位置数据。
Tip:双击控制面板中的轴限位值可更新关节限制。
Tip:若库中没有外部轴模型。你可以在主菜单栏选择实用程序➔建模结构或机器人,通过这个功能自定义。