通用操作
本章介绍如何在RoboDK中校准工具、坐标系和导入 3D 模型的通用操作,以便在RoboDK中创建项目。
包括以下主题:
●如何校准工具(TCP)
●如何校准参考坐标
●如何导入STEP或IGES档案
●如何改变仿真速度
●如何计算程序的执行周期
定义工具(TCP)
机器人工具,或称为工具中心点(TCP),用于将机器人移动到笛卡尔坐标系位置(如给定XYZWPR值的笛卡尔目标点)的基准点。TCP并不是一个独立存在的坐标系,而是通过一个变换从机器人法兰坐标系定义出来的。在任何机器人应用中,无论是否涉及离线编程,正确定义TCP都至关重要。
定义机器人工具的步骤:
1.选择实用程序➔
2.选择要定义的工具。
或者,右键单击工具,选择
3.选择方法:
a.通过点校准XYZ:以不同姿态使TCP接触同一固定点
b.通过平面校准XYZ:使TCP接触平面(类似测头),TCP 可以是点或球体。
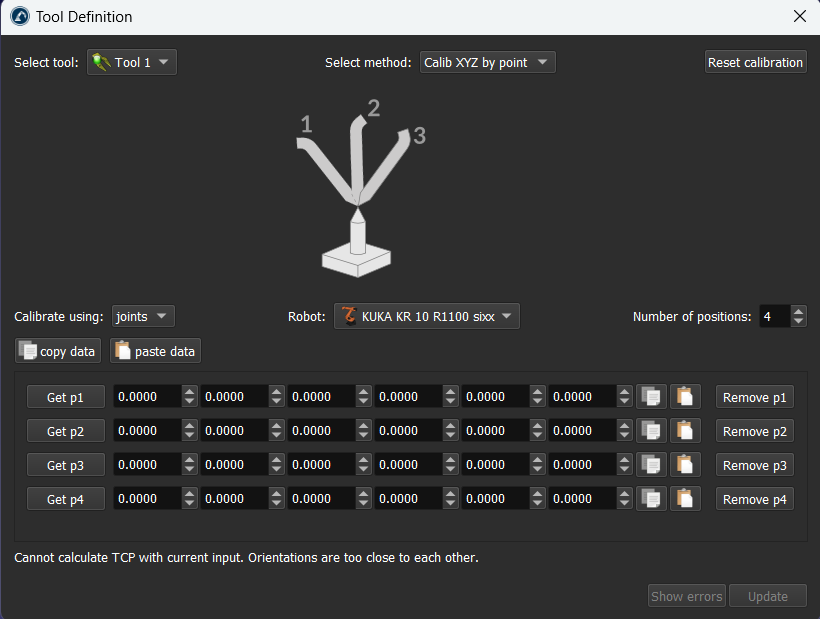
Note:通过不同姿态触碰同一点(第一种方法)与大多数机器人示教器内置方法相同。使用RoboDK可更直观查看TCP误差。
Note:若需计算球体中心,推荐使用平面法定义TCP。此方法会自动获取接触探针的中心。
4.默认使用关节值校准TCP。若已有笛卡尔目标数据,可切换校准使用为姿态。
Important:若通过姿态定义TCP,需提供机器人法兰相对于基坐标系或参考坐标系的位置和姿态(位姿)。有关如何提供这些值的更多信息,请参阅参考坐标系章节。
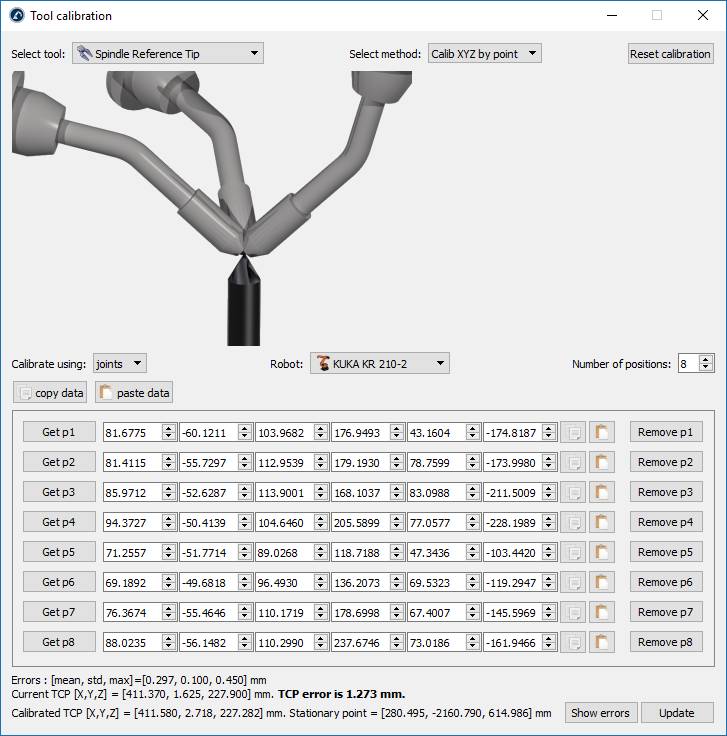
Tip:建议使用超过3-4组配置数据校准TCP,以提高精度并估算误差。高精度场景推荐8组以上数据,低精度需求可仅用3组。
5.选择目标机器人。
6.调整用于校准TCP的采样点数(后续可修改)。
7.在表格中填入测量的关节值或法兰位姿数据。
8.最后点击 “更新”, 应用新工具坐标系至RoboDK工作站。
Video:这段视频展示了如何使用欧姆龙TM 机器人校准机器人工具 (TCP):https://www.youtube.com/watch?v=TM-9vGR2r4k&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=2。
Tip:配置列表可通过右侧按钮手动填写或复制/粘贴数据。
Important: 提供关节值时建议保留至少4位小数(可在菜单栏:工具➔选项➔精度➔程序生成的小数位修改)。
Tip:若已设置机器人驱动,可通过 Get p1 按钮直接从真实机器人获取当前关节值至RoboDK。更多信息详见机器人驱动章节。
Important:建议保存所提供的数值的单独副本。选择 "复制数据 "和 "粘贴数据 "可复制/粘贴所有内容。
Note:输入数据后,新工具(TCP)会自动计算生成。
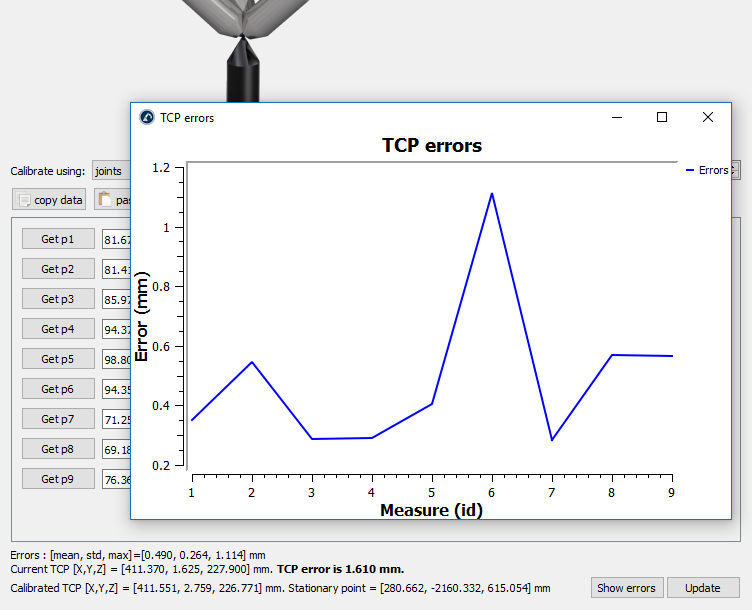
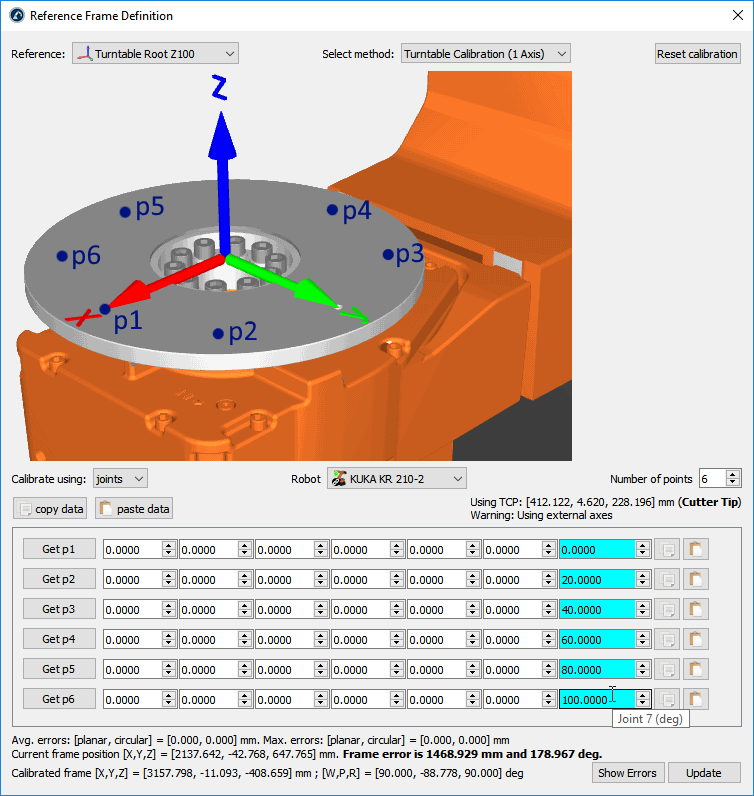
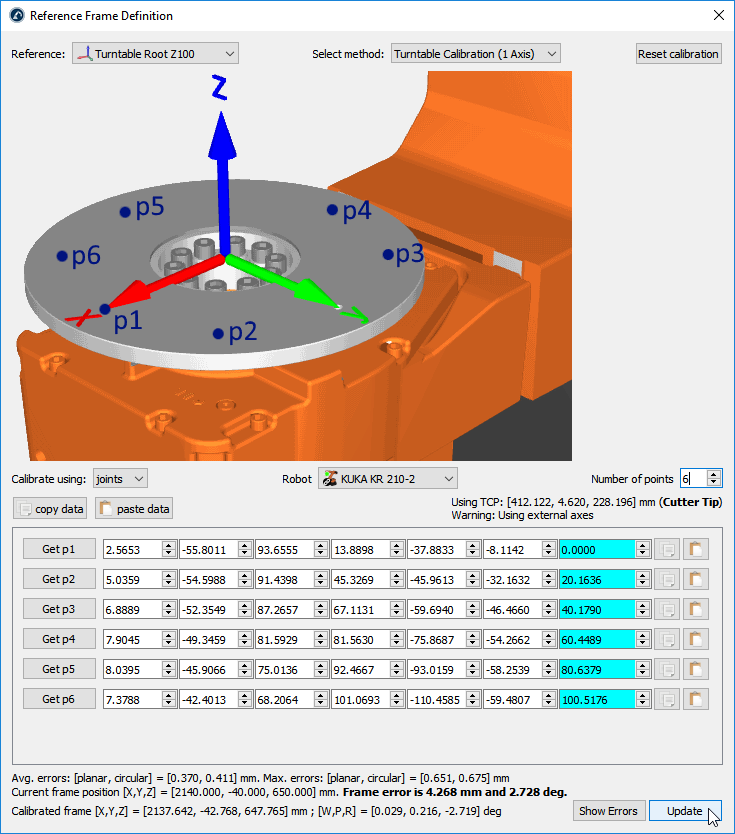
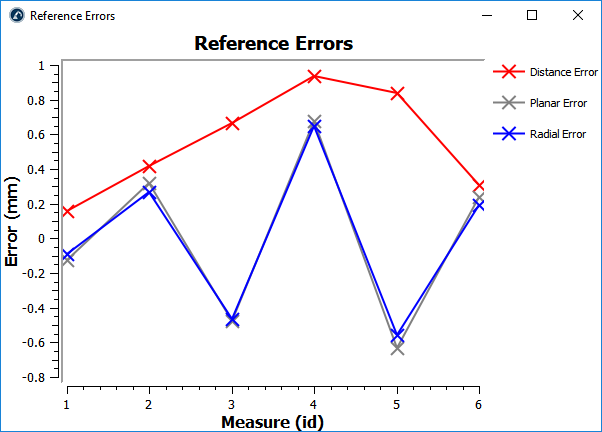
Tip:界面会显示平均误差、方差(std)和最大误差。点击“显示误差”可查看各采样点相对于平均值的误差分布图。手动操作易引入异常误差点,可通过 “删除pX” 按钮删除明显偏离平均值的点(例如图中删除第6点后误差改善)。
例如,下图显示了选择删除p6 按钮删除点 6 之前的错误。
定义参考坐标系
参考坐标系用于定义物体相对于机器人的位置和姿态。在机器人程序中基于参考坐标系示教目标点,这样可以在调整或移动程序位置时,无需重新示教所有目标点。
更多有关参考坐标系的信息详见参考坐标系章节。
定义参考坐标系需要使用机器人工具(TCP)探测若干点,并记录相应的关节值(或外部测量系统的坐标)。
Important:必须先正确定义TCP(除非使用外部测量系统获取的点),因为参考坐标系的校准依赖于机器人运动学模型。如果TCP校准存在误差,这些误差会传递到参考坐标系的校准结果中。
Note:也可以使用激光跟踪仪等外部测量设备完成参考坐标系的定义。
定义参考坐标系的步骤如下:
1.在菜单栏选择:实用程序➔
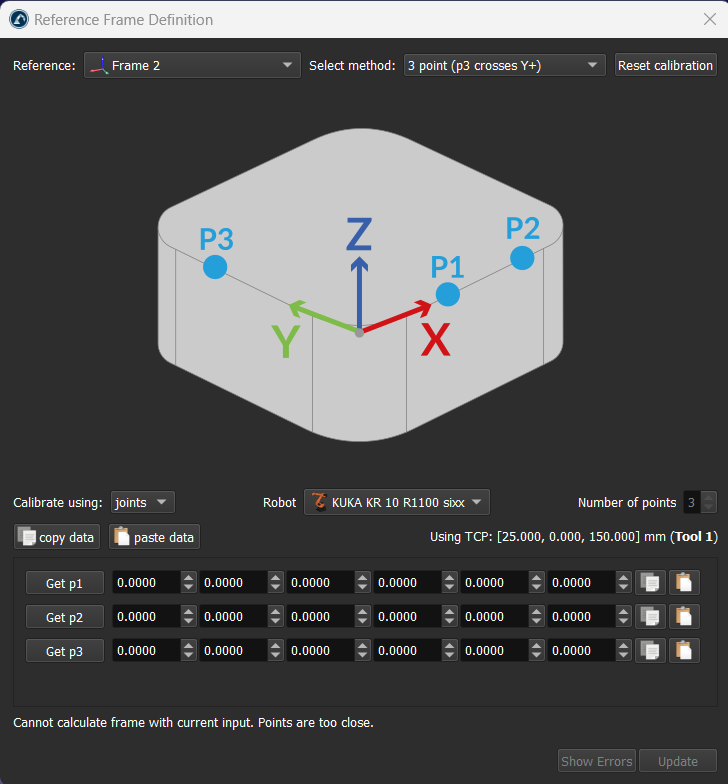
2.在参考坐标系的定义窗口下拉选择你需要校准的坐标系:选择参考坐标系。
或者,右键单击参考坐标系,选择
3.选择方法:
a.3点法(第3点位于Y轴正向)
b.3点法(第1点位于坐标系原点)
c.6点法(更高精度)
d.转台校准:用于校准转台上的参考坐标系,确保转台轴线对齐。
Note:机器人控制器通常允许通过示教器上列出的三点来定义坐标系。
4.默认的校准使用:关节。若已有各点相对于机器人基坐标系的XYZ坐标,可将校准使用切换为:点位。
6.在表格中填入测量点数据(关节值或XYZ坐标)。
7.最后,选择 "更新",这样就可以应用新的参考坐标系。
Tip:配置列表可手动填写数据,或使用右侧的复制/粘贴按钮快速输入。
Video:这段视频展示了如何使用欧姆龙TM机器人校准坐标系:https://www.youtube.com/watch?v=WmyIAgNyPC0&list=PLjiA6TvRACQd8Zju_r_VSL7LBNEmBE57E&index=3
Tip:如果已与机器人连接,可以选择"Get p"(获取 p点)按钮,直接从机器人上获取机器人关节。更多信息详见机器人驱动章节。并非所有机器人都可使用此选项,可能需要机器人增材制造厂商出售的附加软件选件。
Important:提供关节值时建议保留至少4位小数,修改位置:工具➔选项➔精度➔程序生成的小数位。
Note:选择“更新”后,RoboDK 将在工作站中保留副本数据。
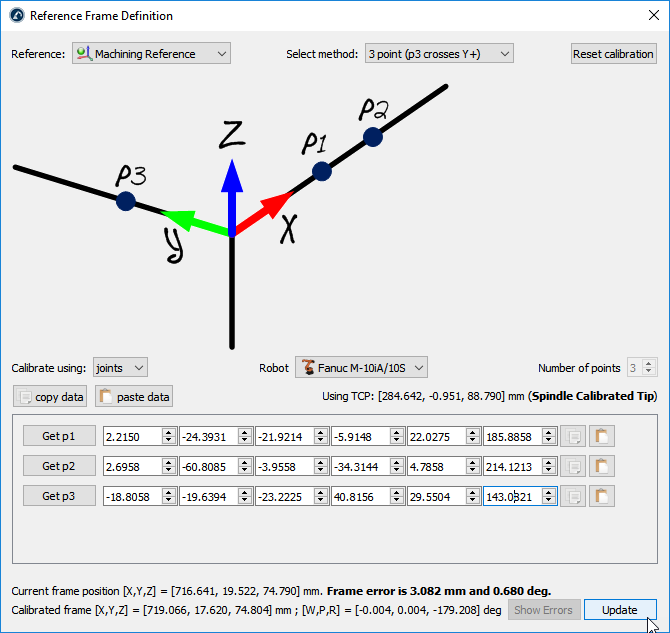
Note:校准完成后,RoboDK会自动计算参考坐标系,并保存输入数据至RDK文件。
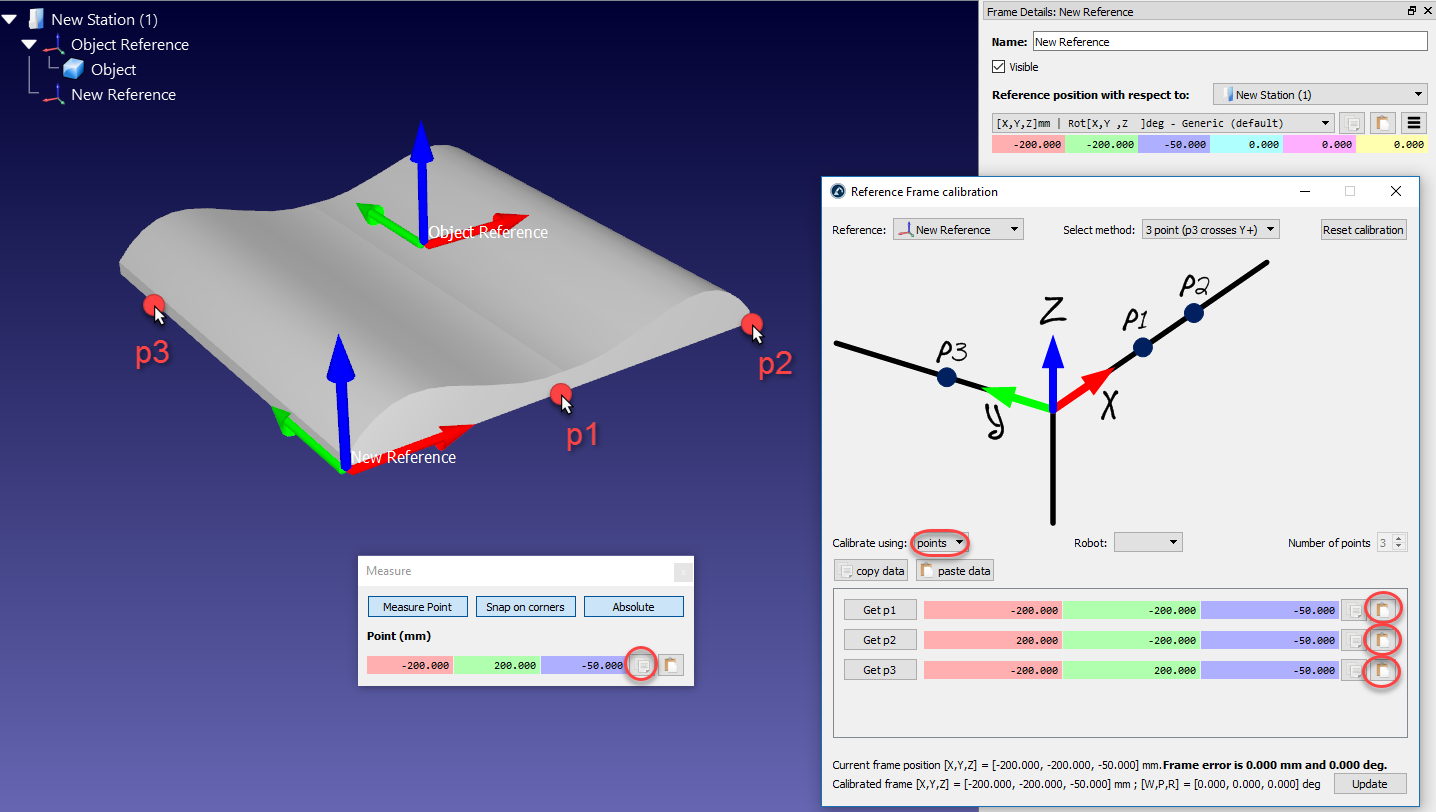
物体对齐坐标系
本节介绍如何根据物体自身的几何特征对齐其参考坐标系(即调整坐标系位置和方向),使其与真实场景中的实际位置匹配。
Note:如果物体的参考坐标系已位于机器人TCP可探测的位置,则无需执行此流程。
操作步骤:
1.导入3D物体模型到工作站内。
2.选中
3.选择程序➔
确保后续参考坐标系是归属在根目录下。
4.右键点击:参考坐标系,在菜单中选择
流程与前一节定义参考系类似,但需选择虚拟物体上的几何点(而非真实物体上的点)。
5.选择校准方法。
例如选择:3点(P3指向Y+)。
6.在参考坐标系的定义窗口,校准使用下拉选择:点位。
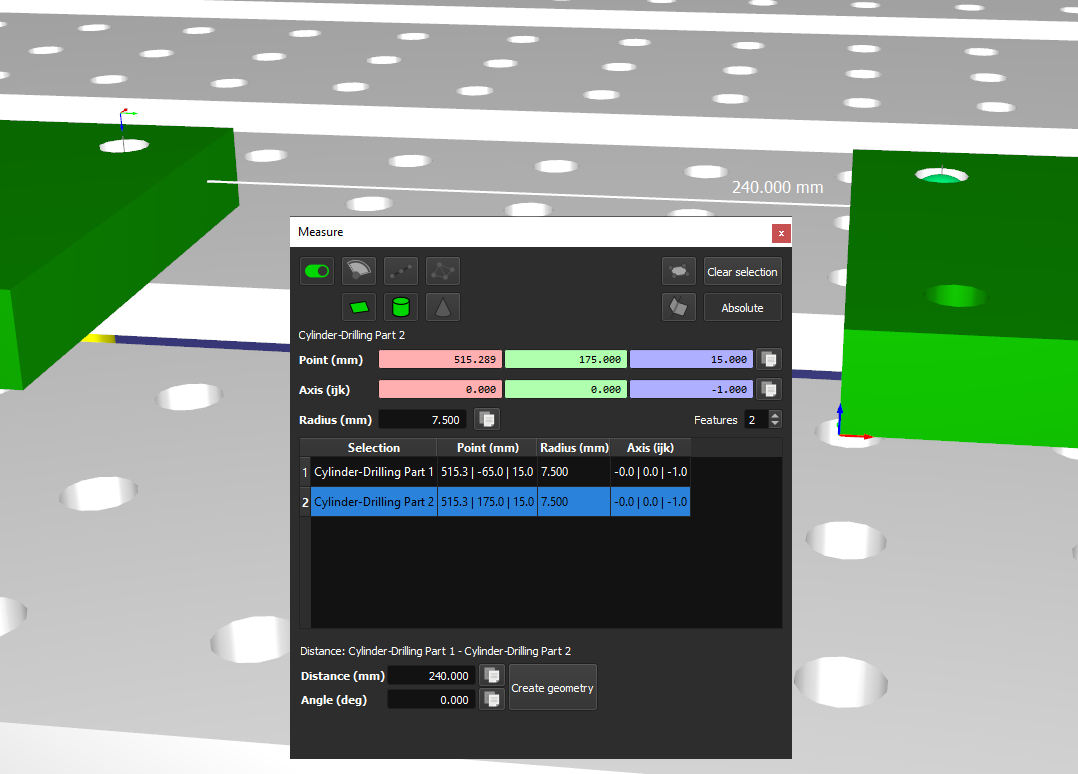
7.在主菜单中选择工具➔ 测量,打开测量工具。
8.在测量工具中打开"绝对"按钮,确保点位基于工作站坐标系(绝对基准)测量。
9.在物体上选择3 个点,并将其输入参考坐标系的定义窗口。
Tip:你可以使用复制/粘贴按钮,简化输入XYZ坐标的数值。
10.选择更新。参考坐标系将自动定位至目标位置。
11.右键点物体,选择:改变坐标系(按住Shift+拖动)。然后选择New Reference。物体绝对位置不变,但其相对于新坐标系的相对位置将被明确定义。
12.将新参考坐标系拖放至机器人基准坐标系下,即可开始离线编程操作。
Important:必须将参考坐标系直接连接到站点根部,以便我们能够使用测量工具进行绝对测量。
Tip:在一侧新建一个工作站点击:文件➔新建工作站,并单独将对象与参考坐标系对齐可能更容易。然后,仅将对象复制/粘贴到主RoboDK工作站中。
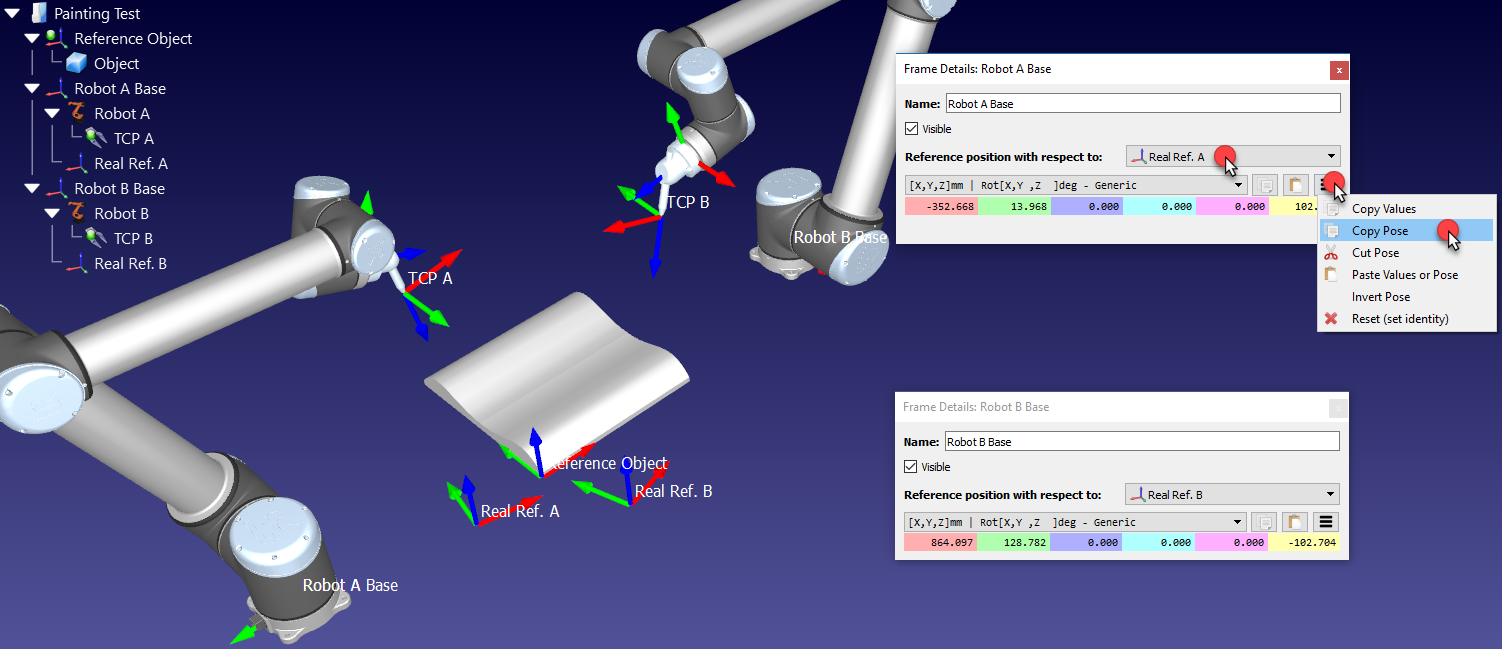
机器人对齐坐标系
本节介绍如何通过共享同一参考坐标系,实现多台机器人的离线协同编程。
在典型的离线编程应用中,物体位置通常基于单台机器人坐标系进行调整。但当多台机器人协同作业时,必须将所有机器人坐标系统一到同一参考基准(如工具坐标系或公共参考系)。
对齐多台机器人参考坐标系的操作步骤:
1.确保各机器人参考系与工具参考系独立。若存在依赖关系,需将所有参考系拖拽到根工作站下方。
2.为每台机器人基坐标系添加新参考系(比如Real Ref. A 和 Real Ref.B),用于表示工具相对于各机器人的实际位置。
3.分别校准这些参考系(使用校准参考系校准流程,例如3点法)
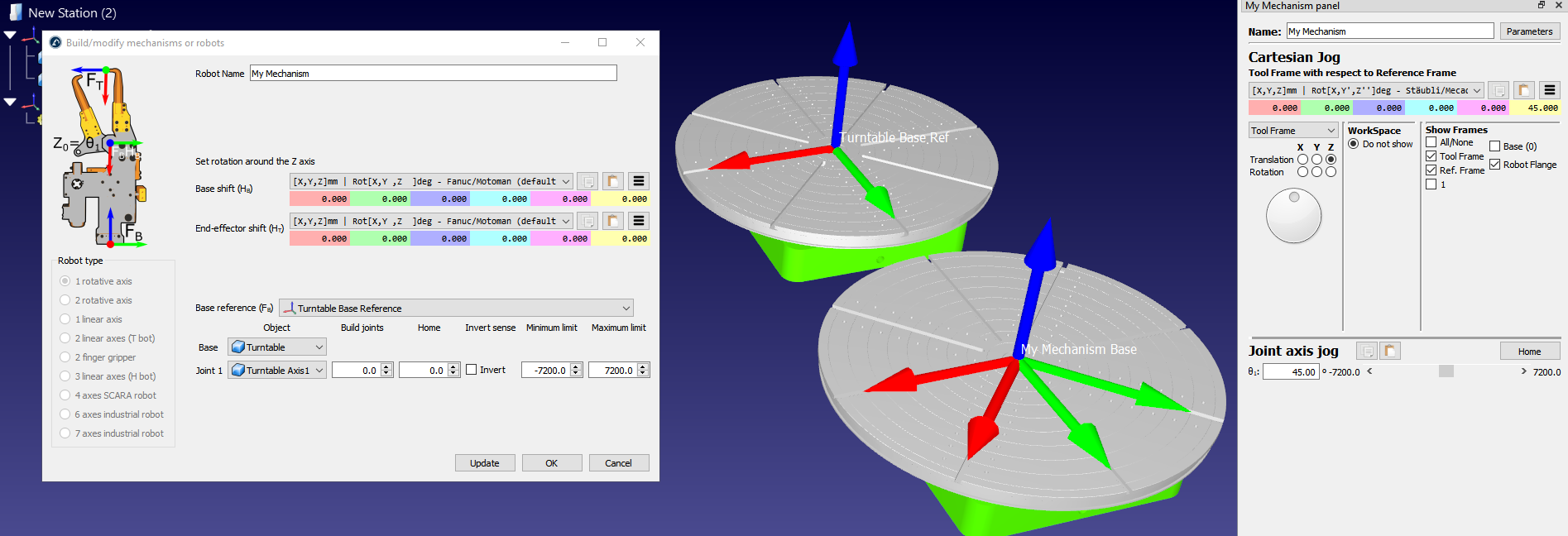
此时会看到三个参考系(工具参考系、机器人A或B真实参考系)本应重合,但因校准误差未对齐:
4.双击机器人基坐标系(如Robot A Base),打开参考系坐标详情窗口。
5.复制该机器人基坐标系相对于其真实参考系(Real Ref. A)的姿态,也可以点击复制按钮。
6.继续在该窗口中,将参考系的位置相对于选择为Reference Object参考系。
7.粘贴复制的坐标值。机器人基坐标系将移动,使Real Ref. A与Reference Object完全重合。
8.重复步骤4-7,对齐其他机器人的参考系
完成上述步骤后,所有机器人参考系将与Reference Object匹配,确保协同作业的一致性。
定义转台
上一章介绍的定义参考坐标系提供了两种校准转台相对于机器人位置的方法。转台的校准/识别可以通过机器人配合正确定义的工具或测量系统(如激光跟踪仪)来完成。
我们需要在移动转台轴时多次获取转台上某一点的位置。目前我们支持单轴和双轴转台的校准。
Important:除非使用外部测量系统获取的点数据,否则必须预先正确定义TCP。因为转台位置校准依赖机器人运动学模型,TCP的误差会直接传递到转台校准结果中(即使通过示教器获取点数据也是如此)。
校准1轴转台
按照此步骤校准单轴转台。
1.选择实用程序➔
2.选择要定义/校准的参考坐标系。
右键点击:参考坐标系,在菜单中选择
3.选择方法:转台校准(1 轴)
4.默认的校准使用:关节。若已有各点相对于机器人基坐标系的XYZ坐标,可将校准使用切换为:点位。
5.若项目中有多台机器人,需要选择一个机器人。
6.可以调整你需要的点位数量,这里最低要求为 3 点。
Important:在移动转台时,应与机器人一起探测转台的同一点。需要以正向旋转的方式移动转台(如上图所示)。建议至少使用 6 到 10 个点,以便更好地了解移动转台时的误差。
Important:第一个点将定义转台的 X 轴(静态参考点)。
Important:校准参考坐标系的 XY 平面将与弧/圆描述的平面相匹配。如果没有在该平面上取点,可能需要调整该偏移量。例如,你可以在校准参考系中嵌套添加一个新的参考系,以表示转台的根部。
7.开始在台面上填入机器人关节位置(或点)。
Tip:配置列表可以手动填写,也可以使用复制/粘贴按钮(关节值右侧的按钮)填写。
Tip: 如果你已与机器人连接,可以选择 "Get p"(获取 p点)按钮,直接从机器人上获取机器人关节。有关设置的更多信息详见机器人驱动章节。并非所有机器人都可使用此选项,可能需要机器人增材制造厂商出售的附加软件选件。
Important:如果手动输入数值,建议每个关节值至少包含 4 位小数(提供关节值时)。可以在工具➔选项➔精度➔最大小数中更换允许的小数位数。
Note:选择更新后,RoboDK 将在 RDK 工作站中保留一份所提供数据的副本。
8.最后点击:更新,将新位置应用到 RoboDK 站中选择的参考坐标系。
9.选择显示误差,以显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)。
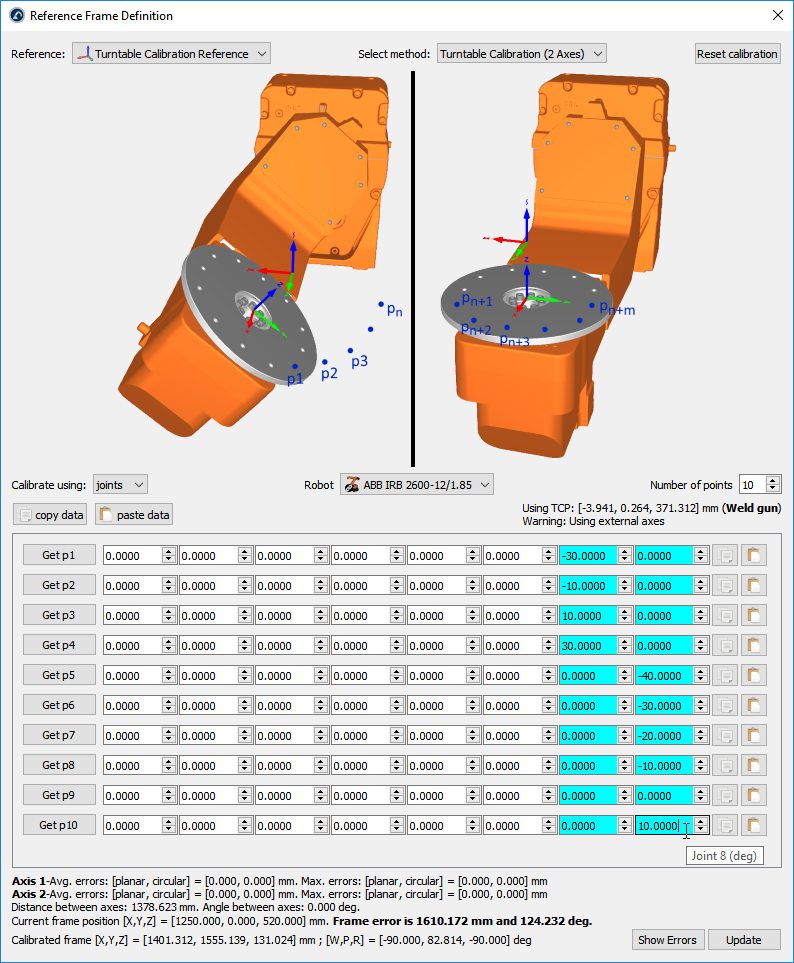
校准2轴转台
按照以下校准2轴转台:
1.在菜单栏中选择:实用程序➔
2.选中要定义的参考坐标系。
或者,右键单击参考坐标系,选择
3.选择方法:转台校准(2 轴)
4.默认的校准使用:关节。若已有各点相对于机器人基坐标系的XYZ坐标,可将校准使用切换为:点位。
5.若项目中有多台机器人,需要选择一个机器人。
6.选择你想要的点数(最低要求为 6 点:每个轴 3 点)。
Important:在移动转台时,应与机器人一起探测转台的同一点。转台需要在每个轴的正向旋转中移动。应先移动轴 1,然后移动轴 2(如上图所示)。建议至少使用12 到 20 个点,以便更好地了解移动转台时的误差。
Note:用于标识轴1 的点数不必与标识轴 2 的点数一致(例如,可以用 4 个点标识轴 1,用 6 个点标识轴 2)。
Important:校准基准的 Z 轴将与轴 2 一致,校准基准的 X 轴将与公共法线一致。此外,校准基准的原点将位于轴 2 和公共法线的交点(轴 2 上最靠近轴 1 的点)。
7.开始用机器人关节位置(或点)填充台面。
Tip:配置列表可以手动填写,也可以使用复制/粘贴按钮(关节值右侧的按钮)填写。
Tip:如果你已与机器人连接,可以选择 "Get p"(获取 p点)按钮,直接从机器人上获取机器人关节。有关设置的更多信息详见机器人驱动章节。并非所有机器人都可使用此选项,可能需要机器人增材制造厂商出售的附加软件选件。
Important:如果手动输入数值,建议每个关节值至少包含 4 位小数(提供关节值时)。可以在工具➔选项➔精度➔最大小数中更换允许的小数位数。
Note:选择更新后,RoboDK 将在 RDK 工作站中保留一份所提供数据的副本。
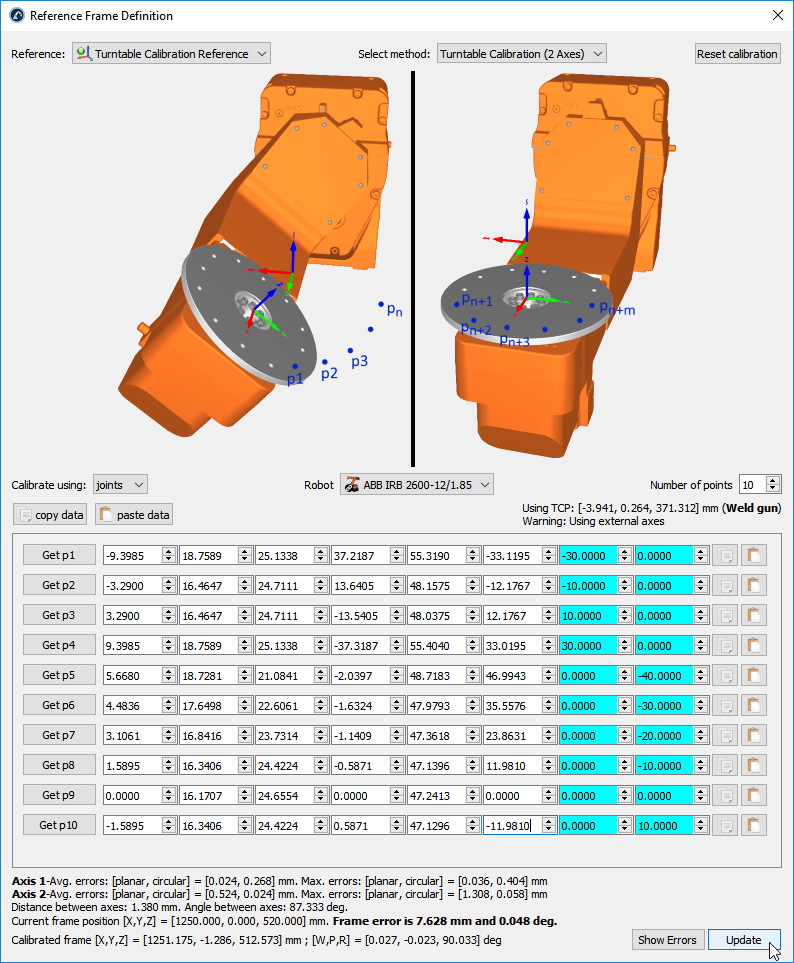
8.最后点击:更新,将新位置应用到 RoboDK 站中选择的参考坐标系。
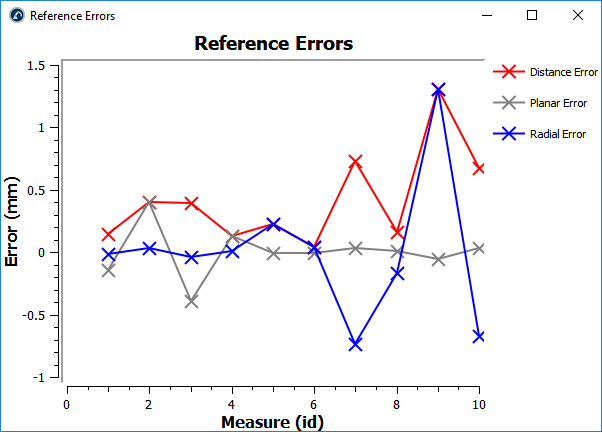
9.选择显示误差,以显示每个点的误差水平(距离误差相当于平面误差和径向误差的总和)。
导入STEP和IGES 文件
RoboDK 支持的两种文件格式:STEP文件和IGES 文件。两者都是参数化的3D 文件。也支持其他格式。
如果文件较大或复杂,导入 STEP 或 IGES 文件可能需要很长时间。在这种情况下,可以在工具➔选项➔ CAD中:快速导入设置,缩短导入这些文件的时间。
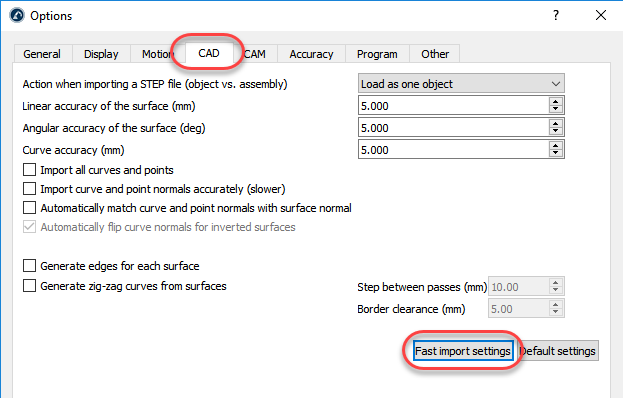
该选项将更新默认设置,以更快导入这些参数化文件。但另一方面,曲线边缘将不会被导入,且曲面的精度可能不够平滑。
Tip:提高曲面的线性/角度精度可以更快地导入文件。降低这些值可提高导入物体的精度。
这里可以查阅更多有关CAD设置中导入的信息。
显示性能
如果你有一个大型或复杂的机器人单元,这会导致仿真过程中显示性能下降或帧率降低。如果你的工作站中有大量物体或复杂几何体,就可能出现这种情况。导入大型 3D 文件可能会降低坐标系的帧频并减慢仿真速度(请参阅上一节)。
提高仿真速度并获得更快帧率的操作:
a)忽略显示小物体:选择工具➔ 选项➔ 显示,选中 "不要显示小于"选项,并将其设置为 2% 或更大。
b)简化物体几何形状:在同一个 "显示"选项卡中选择 "简化对象..."。此操作不会改变3D对象的外观。选择站点的根项目(首项)将对站点中所有对象应用简化。
c)移除小物体选择 "移除小物体... "以删除小对象和三角形。此操作将删除小于指定尺寸的对象和三角形。
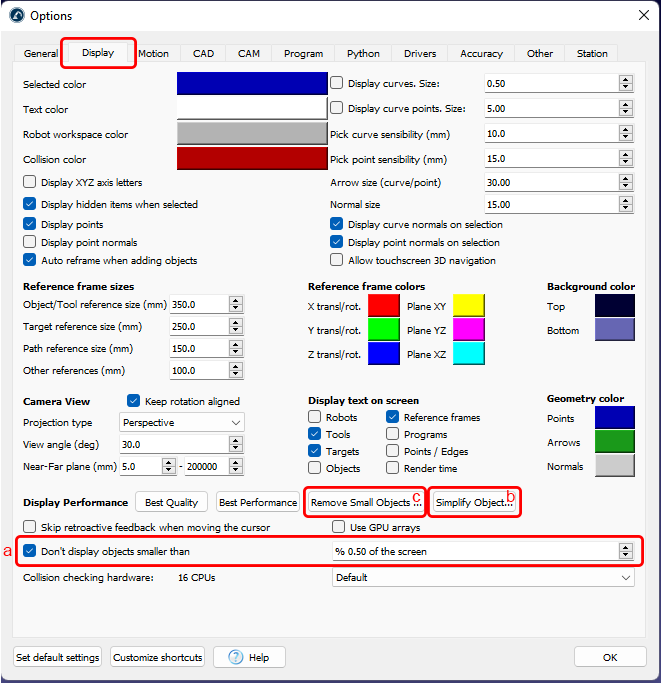
Tip:选择 "简化对象...... "后,请选中工作站的根节点以简化单元内所有对象和机器人。
Tip:在工具➔ 选项➔显示中选择渲染时间,即可查看帧频。帧频将显示在屏幕左下方。
Tip:如果有专用显卡,可以在 工具➔ 选项➔ 显示,勾选使用GPU阵列,这样会提供更快的结果。
Note:如果使用 VR,还可以遵循 VR 部分所述的其他性能操作。
导出仿真
在RoboDK中准备好仿真/程序后,你可以将其导出为可共享的RoboDK for Web链接、3D HTML或3D PDF。
Note:Mac 和 Linux 系统无法导出3D PDF。
生成RoboDK for Web链接、3D HTML和3D PDF的操作步骤:
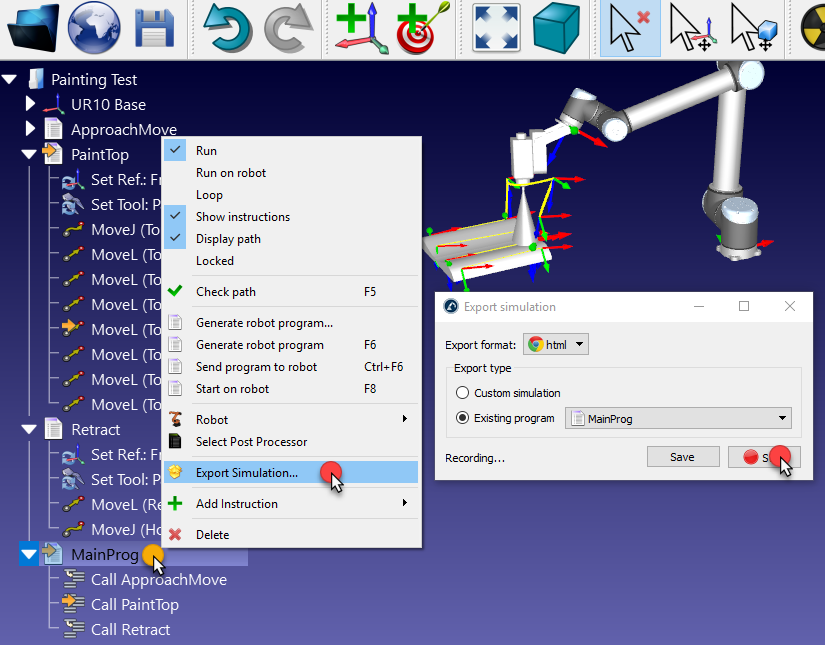
1.右键单击程序(本例中程序名为:MainProg)
2.选择
3.选择"开始"。程序将启动,仿真将一直记录到程序结束。
保存文件。文件保存后会自动打开,你可以预览结果。
Video:如何导出机器人仿真和机器人程序:https://www.youtube.com/watch?v=38Yzhsom54E&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=6
导出仿真 RoboDK for Web
你可以将项目导出为可共享的 RoboDK for Web 链接,该链接允许任何人访问。
导出项目时,你会获得一个链接,用于访问管理导出链接的仪表板。
Note:将项目导出到RoboDK for Web需要专业许可证。
以下是导出RoboDK for Web 的链接示例:
●导出 RoboDK 项目的示例:https://robodk.com/lnk/35303930233736
●打开此链接https://robodk.com.cn/example/cn/Assembly-and-Palletizing-with-ABB-and-Fanuc
●你可以选择资源库中任何实例的详细信息,然后选择切换 3D 视图,在 RoboDK for Web 中预览项目。
Note:RoboDK for Web 不支持 Python 程序。
导出仿真 3D HTML
你可以将项目导出为一个 3D HTML 仿真文件。对 HTML 文件进行压缩后,文件大小会明显减小,你还可以通过电子邮件发送文件。
以下是 3D HTML 仿真的示例:
●https://robodk.com/simulations/UR-Paint.html
●https://robodk.com/simulations/Welding-3-Fanuc-Robots.html
●https://robodk.com/simulations/Robot-Drawing.html
导出仿真 3D PDF
你可以将仿真或程序导出为 3D PDF 文档。导出的 PDF 文档应使用 Acrobat Reader(而不是浏览器)打开。
Tip:如果生成 3D PDF 所需的时间过长,建议在导出前将项目尽可能简化(请遵循显示性能部分中的Tip)。你还可以隐藏仿真中不使用的物体,这样使3D PDF 生成速度更快。
以下显示了3D PDF 仿真的示例:
●https://robodk.com/simulations/UR-Paint.pdf
●https://robodk.com/simulations/Welding-3-Fanuc-Robots.pdf
●https://robodk.com/simulations/Milling-with-External-Axes.pdf
导出仿真 Blender
你可以使用 Blender Export插件,将仿真导出为 Blender 项目。
Tip:你可以在帮助文档的Blender导出插件章节和Blender插件中找到更多信息。
Note:导出到 Blender 需要 Blender 导出插件选项。任何类型的许可证默认情况下都不包含该选项。
仿真速度
仿真速度(或仿真比率)是指RoboDK仿真真实运动的速度。仿真比率为1意味着真实机器人上耗时1秒的运动在仿真中也将耗时1秒完成。
RoboDK默认以5倍于实时速度进行模拟。这意味着在实际机器人上需要5秒执行的程序,在仿真中仅需1秒即可完成。加速模拟功能可将该比例提升至100倍。常规与快速模拟速度可通过"工具➔选项➔运动"菜单进行调整。
Tip:菜单中选择:程序➔
Tip:选择退格键,或在主菜单中点击程序➔
周期时间
RoboDK在仿真程序时可提供周期时间预估。周期时间即程序运行完成所需时长。RoboDK提供的周期时间精度取决于诸多因素,包括机器人控制器型号、运动轨迹类型(关节运动与直线运动)、圆滑过渡设置的使用以及实际速度/加速度限制等。
在适当条件下,RoboDK能够精确计算循环时间。这需要满足两个前提:机器人程序执行精确的点到点运动(不启用圆滑过渡),且实际运行速度与加速度不超过物理限制。
Note:当你以接近机器人极限的速度和加速度进行编程时,实际速度和加速度将高度取决于机器人负载及其所处位置,因此循环时间计算仅为估算值。RoboDK中的循环时间计算结果可能存在2倍或更大的误差。
机器人速度和加速度非常Important,因为它们与机器人有关。必须以指令形式或在机器人参数菜单中提供机器人速度和加速度(线速度和关节速度/加速度)。例如,你可以在程序中使用设置速度指令更改速度。RoboDK 假定机器人在达到最大速度之前具有均匀加速度,然后,均匀减速。
默认情况下,RoboDK 对关节移动使用关节速度和关节加速度,对线性移动使用线性速度和线性加速度。该设置可以切换,位置在工具➔ 选项➔ 运动➔移动时间计算(线性与关节速度)。

Note:在运动选项卡(工具➔选项➔运动),可以指定关节/线性速度/加速度如何以正确的时序应用于关节和线性运动,并准确计算循环时间。例如,优傲(Universal Robots)对线性运动使用线性速度和加速度,对关节运动使用关节速度和加速度(RoboDK中的默认设置)。其他机器人控制器可能会应用最严格的限制。其他机器人制造商可能不允许提供数值形式的加速度参数。
Note:如仿真时间部分所述,RoboDK 的默认仿真速度是实际运动速度的 5 倍。可在菜单工具➔选项➔ 运动中调整。
改变颜色
通过"改变颜色"功能,改变RoboDK 中物体的颜色。
Video:如何更改 3D 模型的颜色:https://www.youtube.com/watch?v=20dJN1r9wjo
请按照以下步骤更改机器人的颜色:
1.在菜单栏选择:工具➔改变颜色。
2.导入3D模型后,你就可以看到机器人原色。
3.在 "改变颜色 "窗口中勾选"选择面",在3D模型中选择要更改颜色的面。
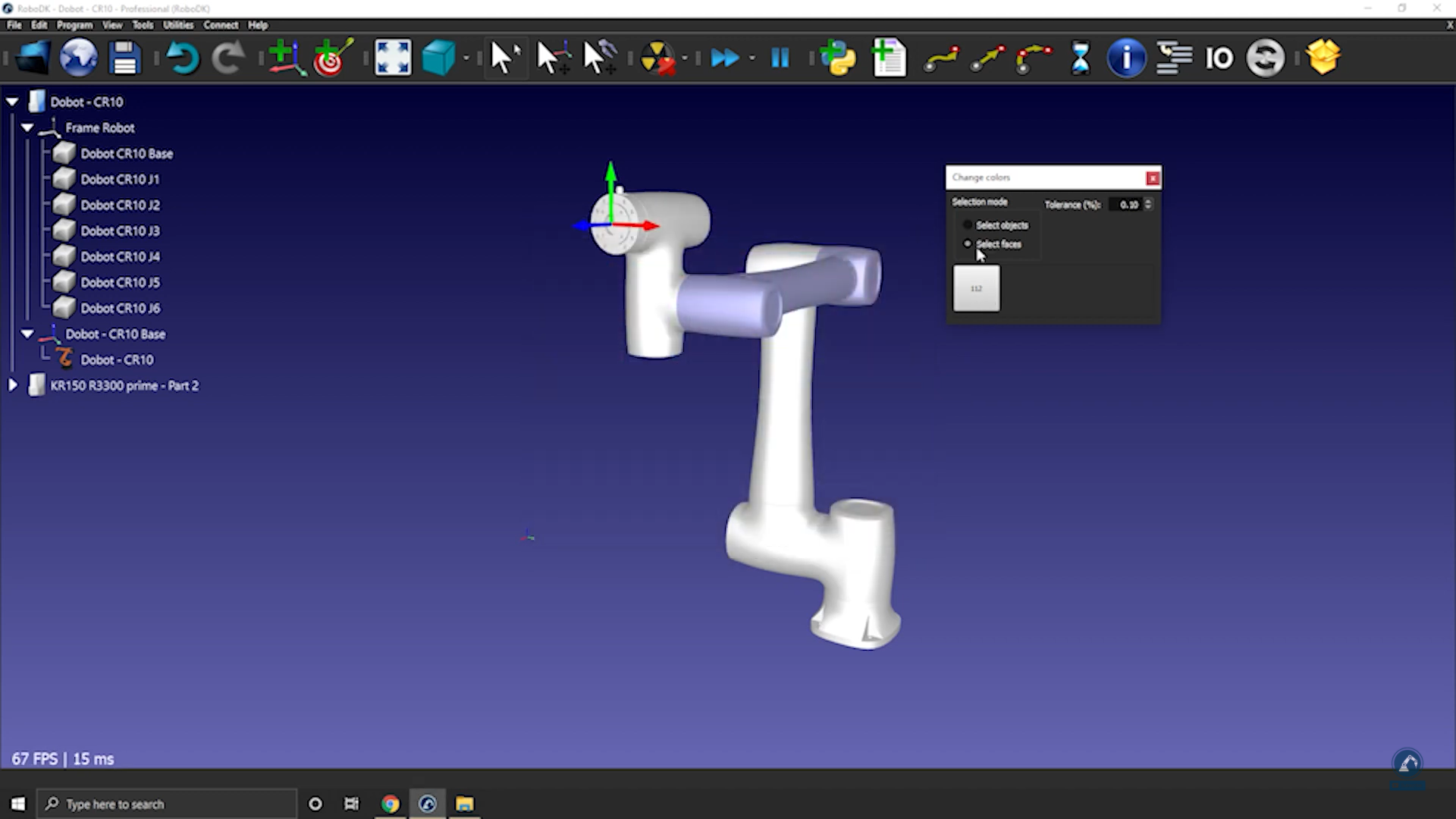
4.然后单击颜色,选择新颜色。
Note:若需将相同颜色应用到机器人的其他部件,可以复制HTML对应的颜色数值。
测量
通过使用RoboDK的测量工具,你可以测量不同几何特征(如圆柱体和平面)之间的距离,并提取其属性。
在菜单栏选择:工具➔ 测量,打开测量工具。然后你就可以在 3D 窗口中选择几何特征。
Tip:你可以使用筛选器来筛选你想要使用的特征(圆柱、圆锥、平面、圆弧、直线等)。
建构结构或机器人
在RoboDK中,你可以建模各式各样的机械装置,包括转台、1~3个线性轴结构、机器人手臂、SCARA机器人、AGV、CNC机床、夹爪。
简化的操作步骤:
1.在菜单中选择:实用程序➔ 建构结构或机器人。
2.选择要创建的机械结构或机器人类型。
3.选择代表机械结构原点的坐标系。
4.为每个关节(机械结构或机器人的运动部件)选择一个物体。
5.输入相应图片中描述的机器人参数。
6.在窗口中点击:更新,就可以查看新的机械结构。
Tip:确保与图像中提供的参数和坐标系相匹配。
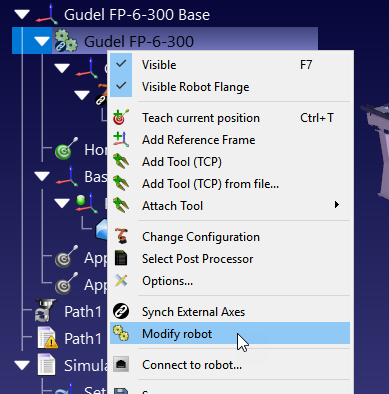
你也可以通过右键单击树中的机器人项并选择修改机器人,修改现有的机械结构。此选项适用于你自己创建的机器人和机械结构。
支持的结构类型:
●单旋转轴(如转台或旋转夹爪)
●双旋转轴(如2轴变位机)
●单线性轴(如直线导轨)
●双线性轴(如T型台)
●三线性轴(如H型台)
●1线性轴 + 1旋转轴(混合机构)
●双指夹爪
●SCARA机器人(4轴)
●6轴/7轴工业机器人
Tip:建议创建新工作站中对其他机械结构或机器人进行建模(选择文件➔ 新建工作站),再通过将机器人保存为机器人文件(右键单击机器人,选择另存为...)或直接复制/粘贴到你的项目中。
如何建模1轴转台
本章节介绍如何为1轴转台建模。转台通常用于机器人加工应用。
Video:以下教程展示了如何为1轴转台建模:https://youtu.be/18HKgBaE7Ag
创建转台模型的步骤:
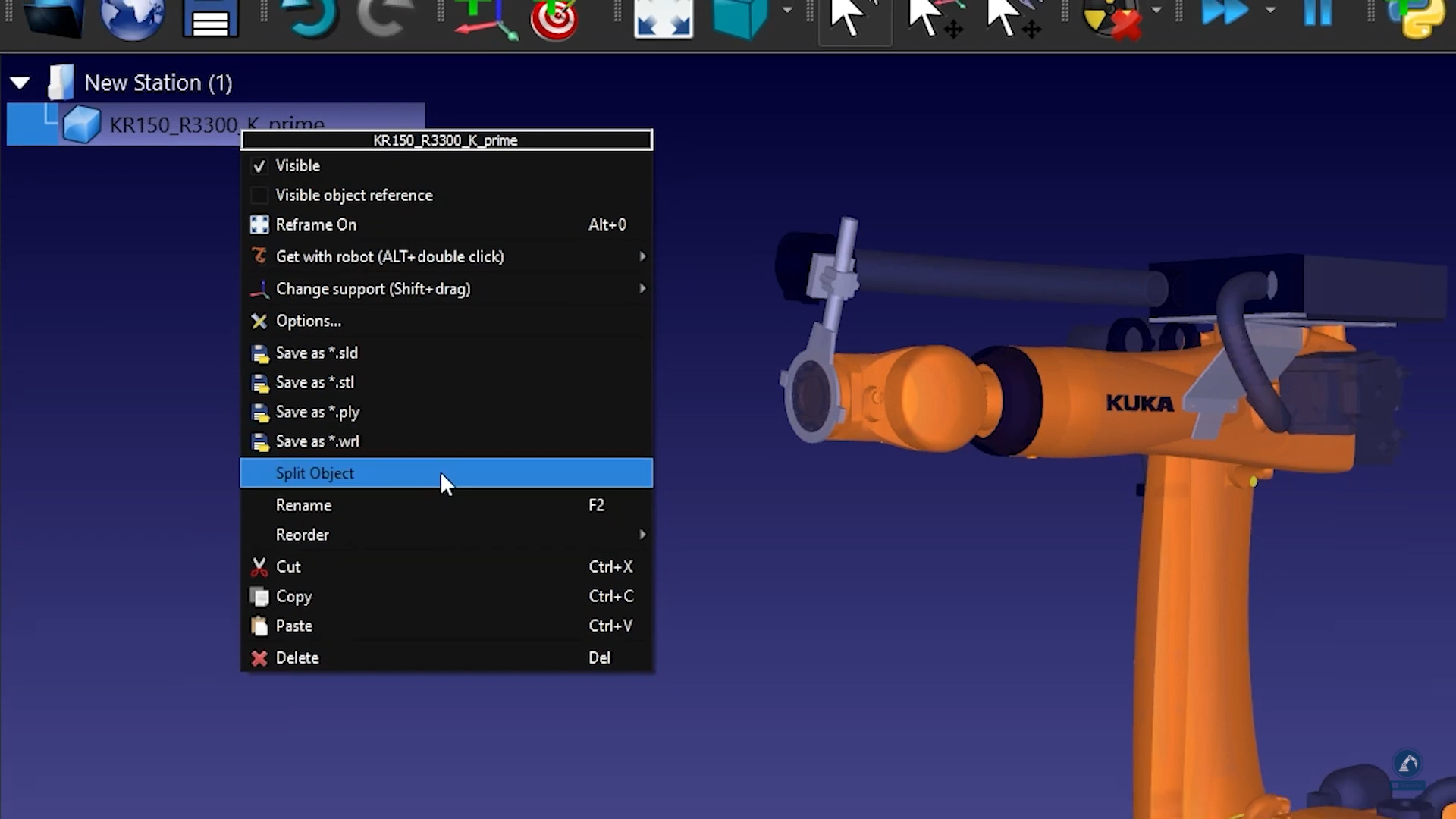
1.加载转台的 3D 模型:将 3D 模型(STL、STEP 或 IGES 文件)拖放到 RoboDK 窗口。
Important:转台的每个运动部件需作为独立对象。右击对象选择分离物体,可分割子部件,选中多个对象后选择合并可重新组合。
Important:为简化建模,需确保参考坐标系的Z轴(蓝色轴)与旋转轴对齐。
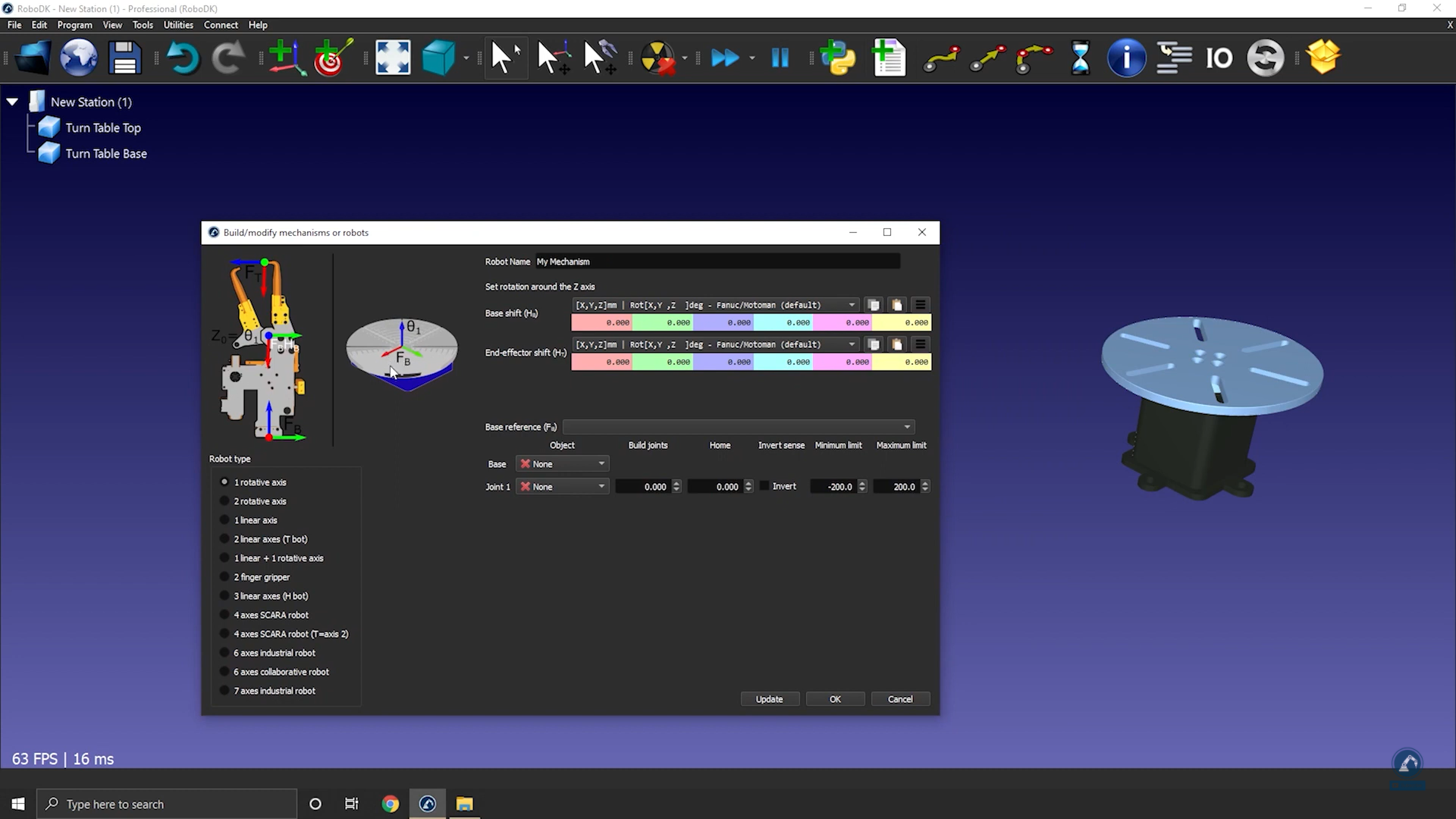
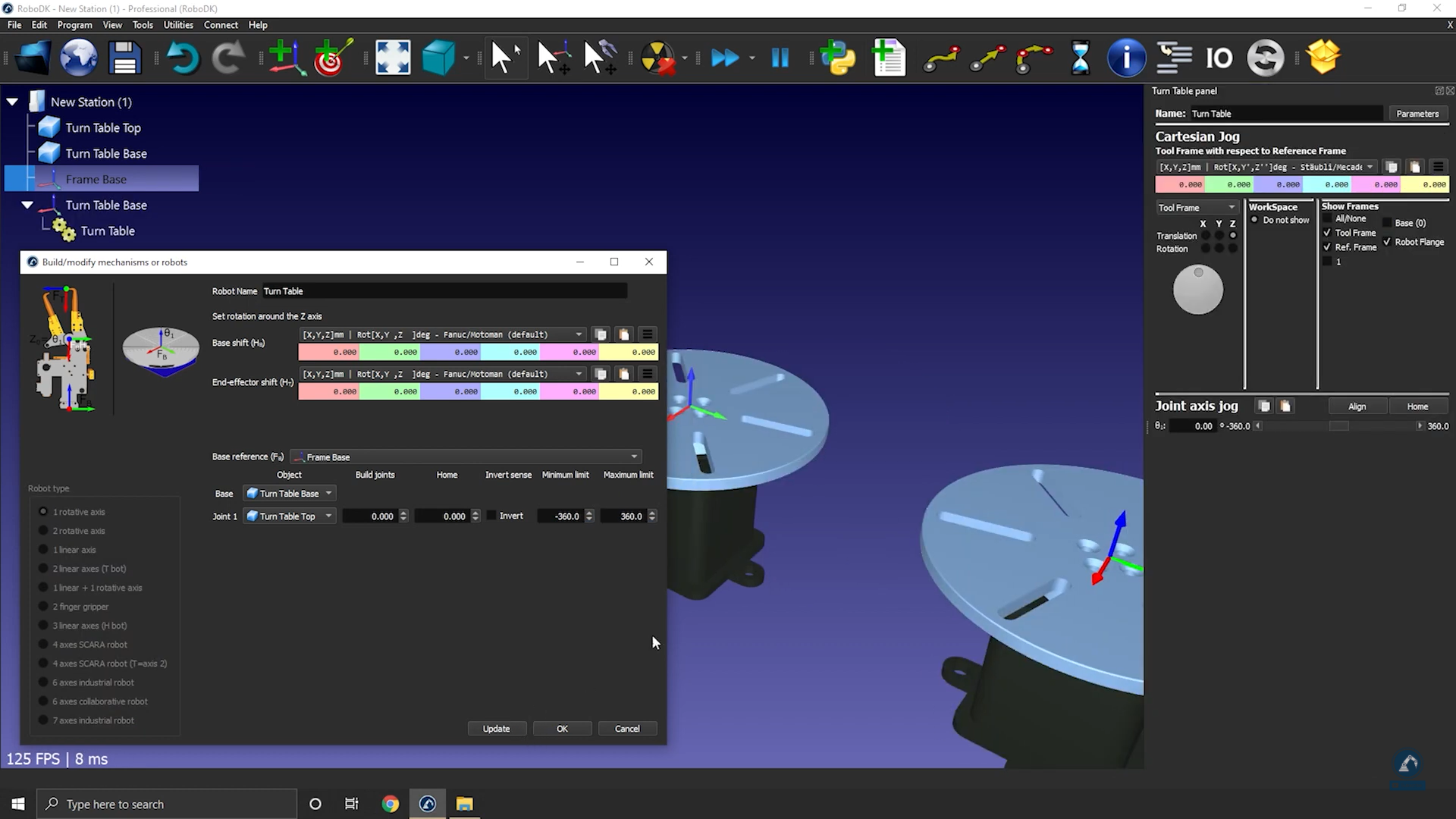
2.在菜单栏处点击:实用程序➔ 建模结构或机器人。
3.下拉选项选择:1 个旋转轴。
4.根据界面示意图,确保基座(Base)和顶板(Top Plate)正确对齐。旋转轴方向:结构将围绕基座坐标系(Fb - Frame Base)的 Z轴 旋转。
5.将机械结构重命名为TurnTable。
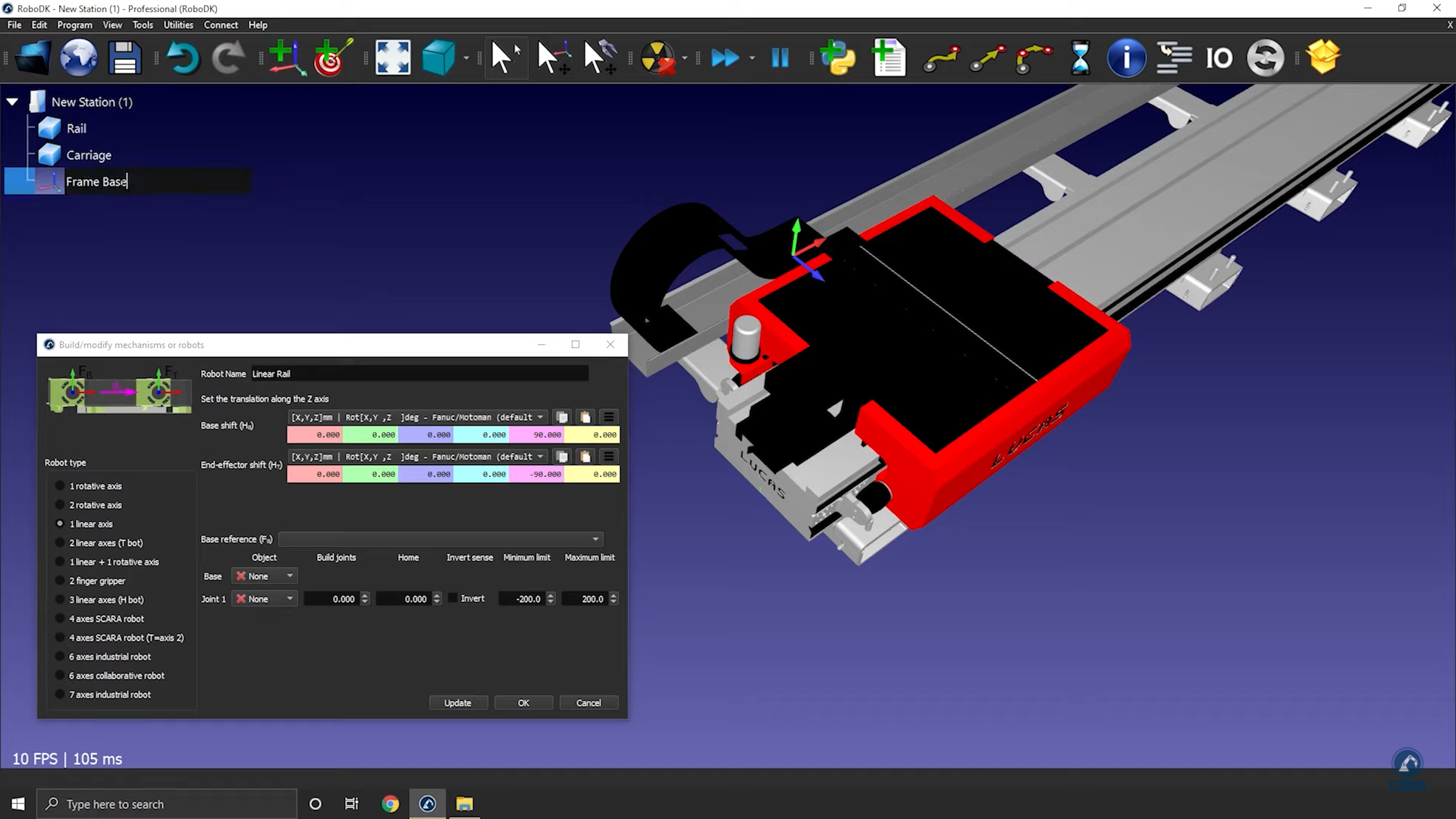
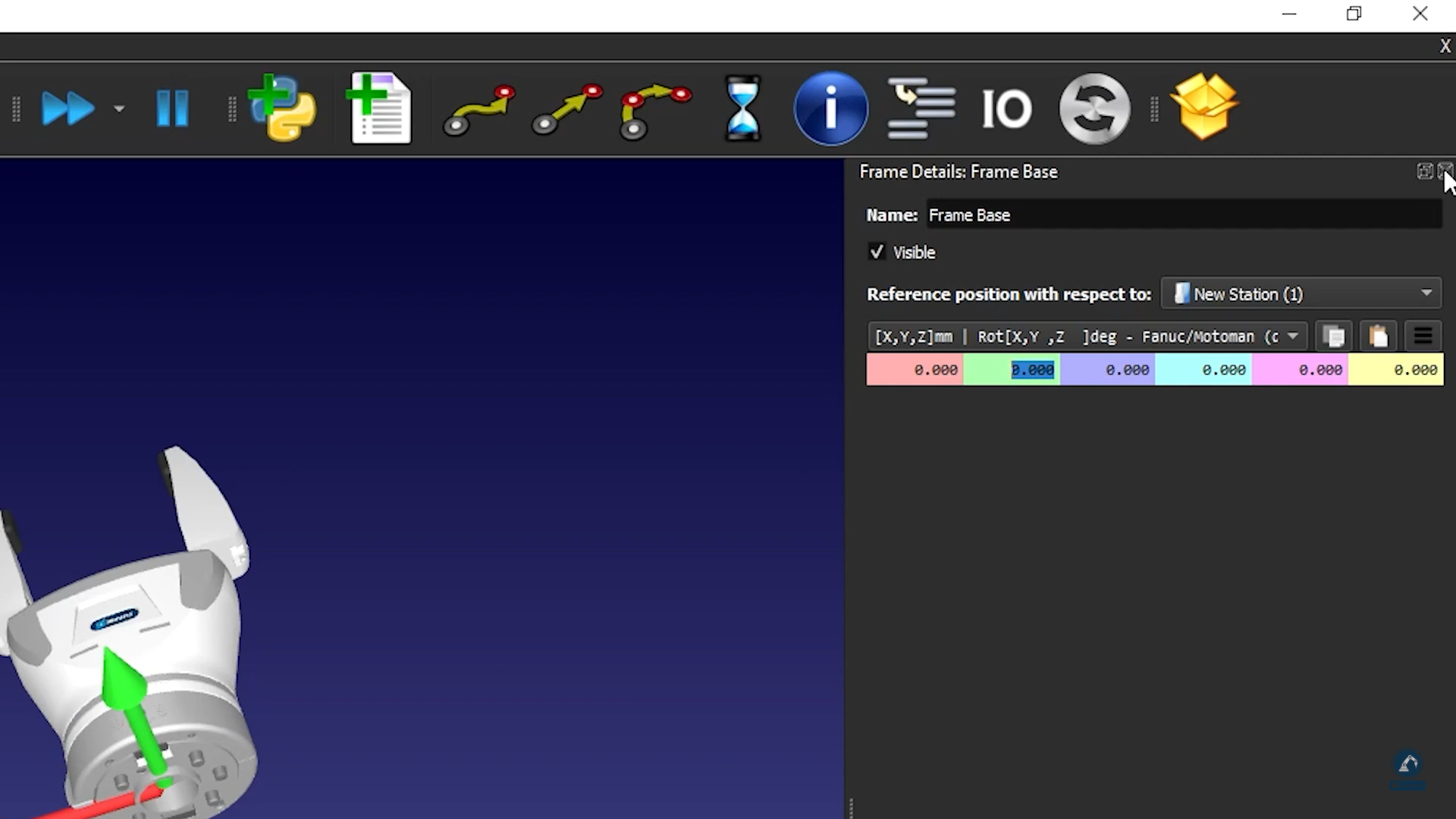
通过创建新的坐标系来定义转台的参考基准::
1.创建新坐标系,命名为Frame Base(FB)。
2.打开坐标系面板,调整位置。
3.选择 "工具",然后选择 "测量"。
4.点击物体表面的测量位置,将测量值粘贴至坐标系的面板,如下图所示。
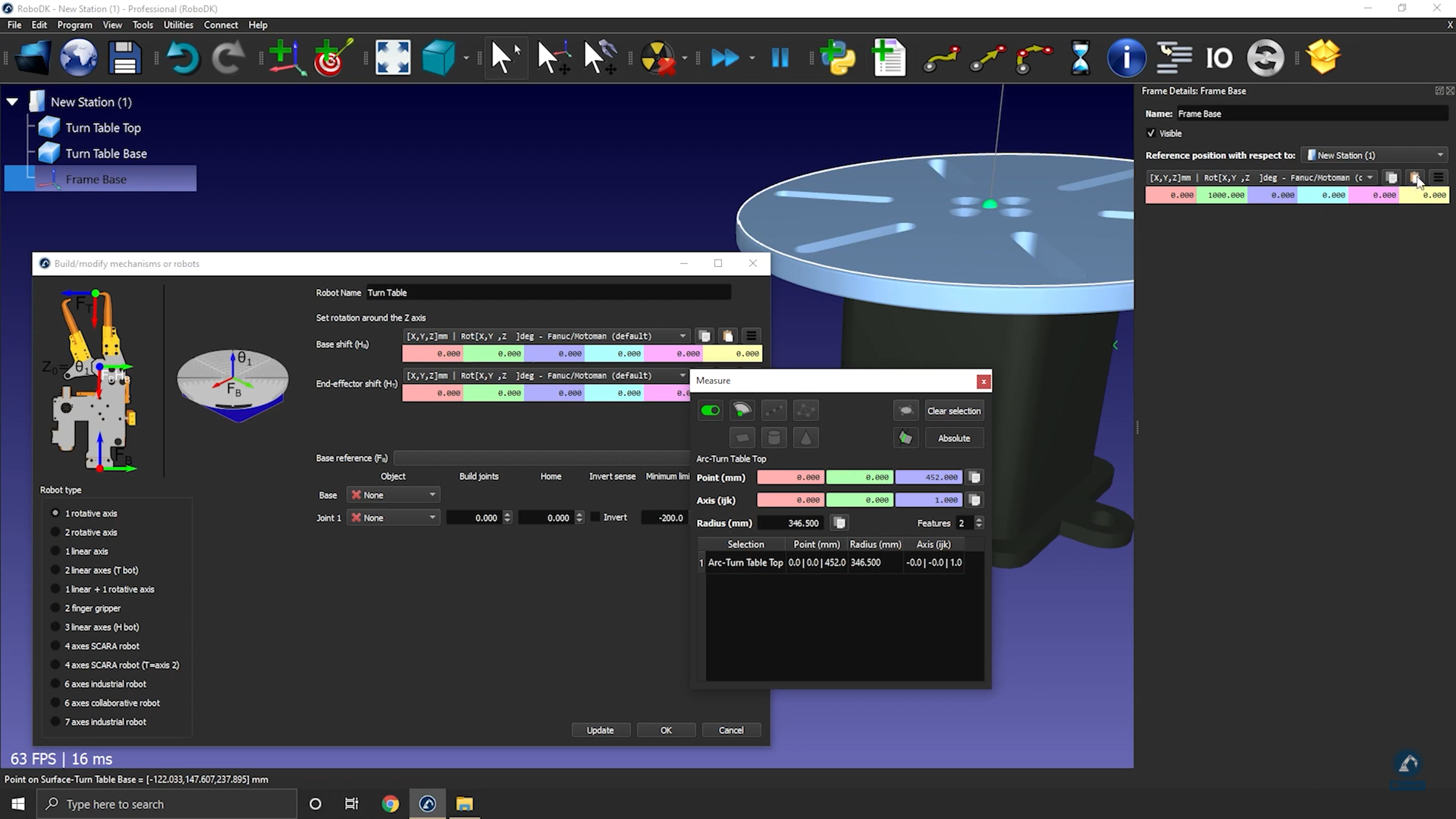
现在参考位置应与图像中的参考位置匹配。参考框架和对象项应自动填充。如果自动选择不正确,你可以相应地进行更新。
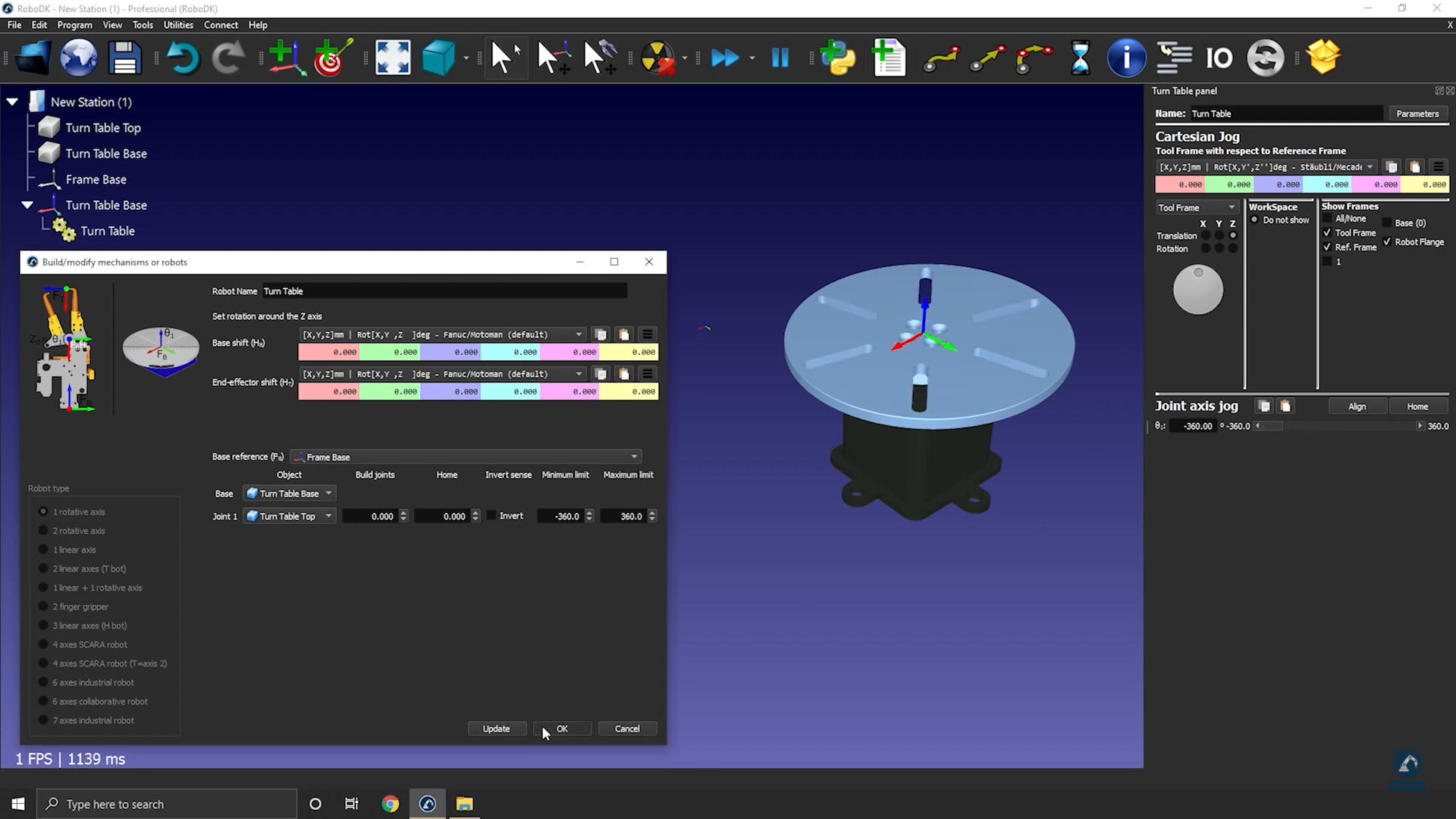
6.调整关节限位(可选)若需设置转台旋转范围为±20圈(即±7200度),可直接在关节限位栏输入数值。后续修改:双击机器人面板中的关节限位标签即可重新调整。
7.点击更新,就会生成结构模型。
8.点击 确定即可关闭窗口,或继续调整转台参数。
9.创建完成后,可删除用于构建结构的原始3D模型文件,结构数据已嵌入RDK项目文件,不需要外部依赖。
10.测试转台运动方向和轴限制是否符合预期后,点击确认完成建模。
Note:如果右上角图像中的参考坐标系与基础参考坐标系(Fb)不匹配,你可能需要输入相应的平移量作为基础偏移(Hb)。你还可以添加一个新的参考坐标系,并使用工具➔测量工具在特定位置放置一个坐标系。
Tip:需校准转台与机器人的相对位置时,可参考校准1轴程序精确定位。
Tip:按照此单轴转台校准步骤,可准确地将转台置于机器人的位置。
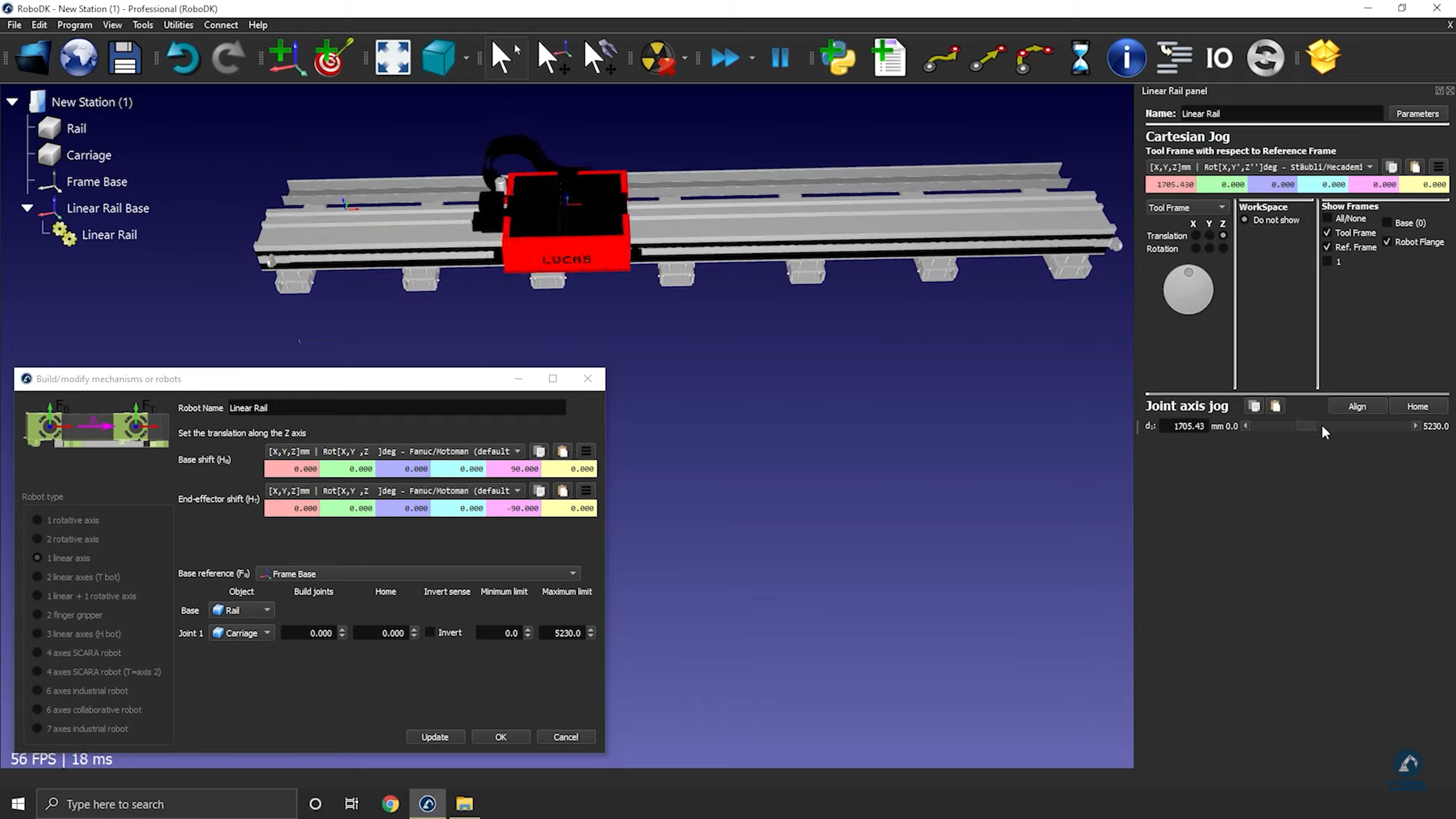
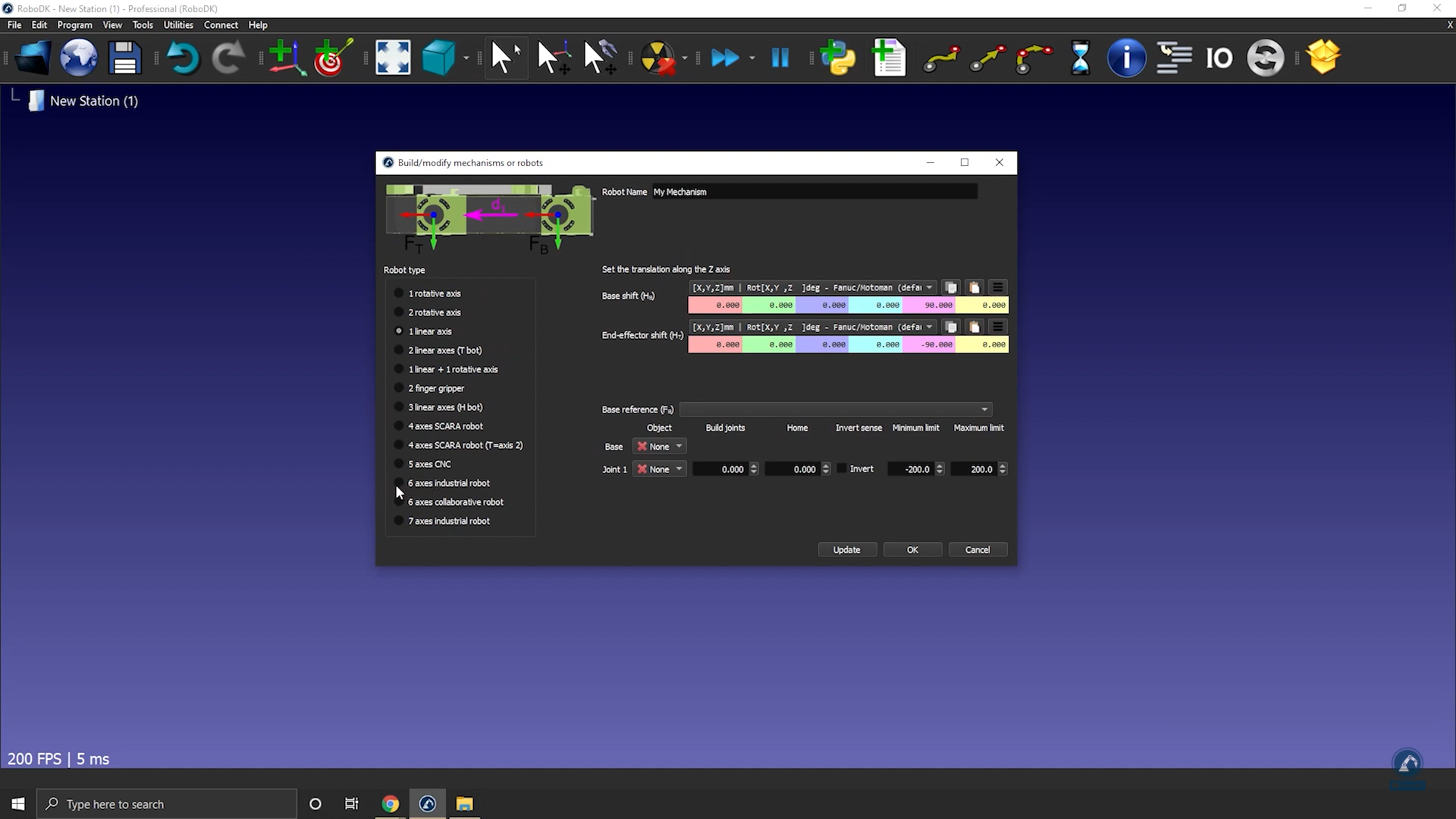
如何建模1轴直线导轨
本节介绍如何对单轴线性轨道(也称线性轴或线性轨道)进行建模。线性轨道有助于扩展机器人手臂的触及范围。
Video:如何制作单轴直线导轨:https://www.youtube.com/watch?v=KTRDmHTOy0M
按照以下步骤导入 3D 模型:
1.在 RoboDK 中拖放 3D 模型,将物体导入工作站(可接受的文件格式包括 STEP、IGES 或 STL 等常见 3D 格式)。
请按照以下步骤打开机械结构生成器:
2.选择实用程序➔ 建模结构或机器人。
3.在下拉选项中选择:1 个移动轴。
4.如果3D模型是组合在一块的,你可以在 RoboDK 中拆分模型。
Note:要将物体分成两块,并更改模型的颜色,可以按照六轴机器人的建模步骤进行。
按照以下步骤定位机器人基坐标系:
5.现在你已经加载了物体,再次打开模型机械结构生成器通过:实用程序➔建模结构或机器人。
6.你可以在该窗口的名称位置为机械结构重新命名。
7.考虑将基坐标系置于导轨的0位置:在此处创建一个参考坐标系,并将其命名为 "Frame Base"。
按照以下步骤调整基坐标系的位置:
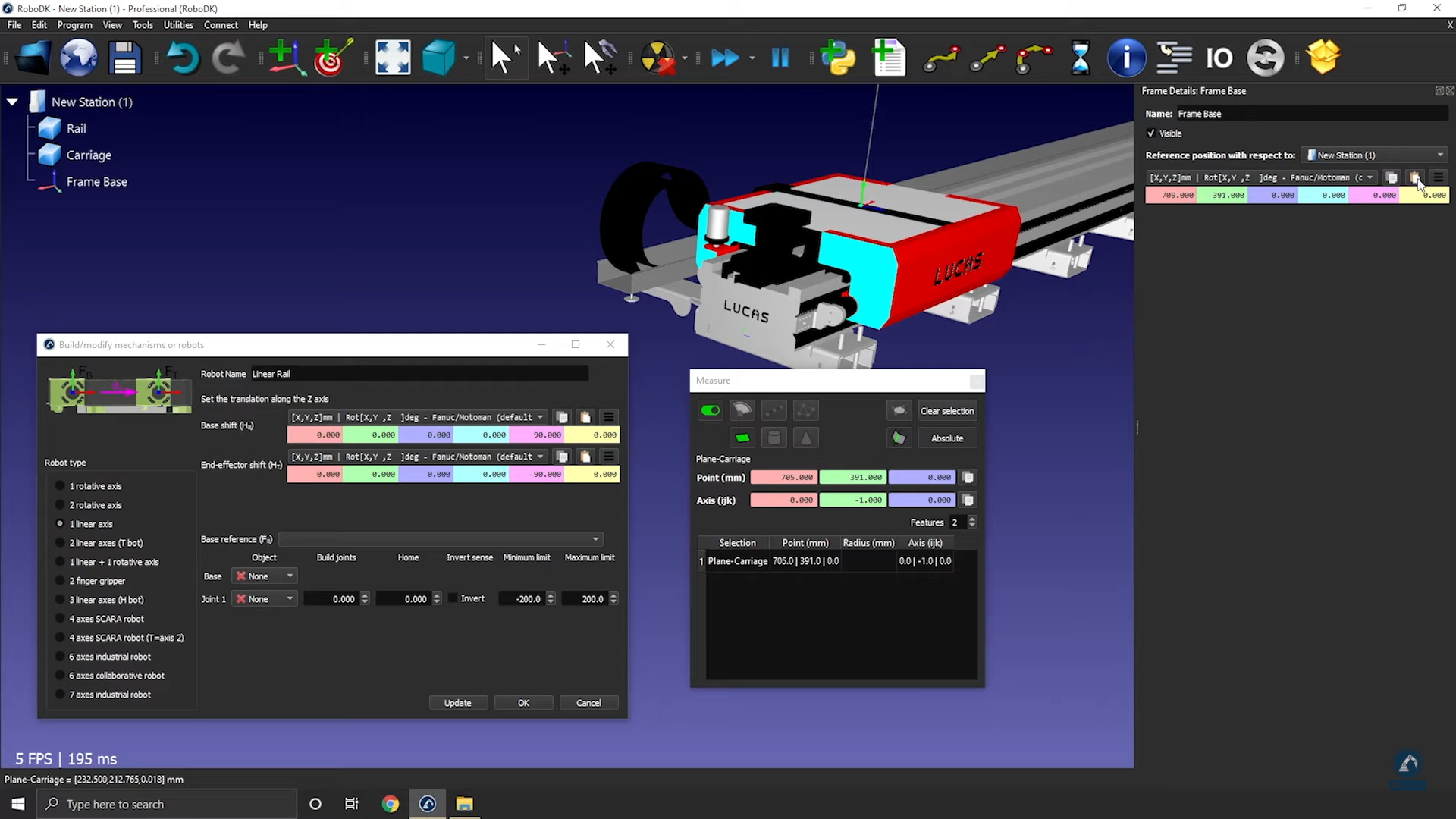
8.选择工具➔测量。
9.使用测量工具,根据下图所示的测量界面选择图标。
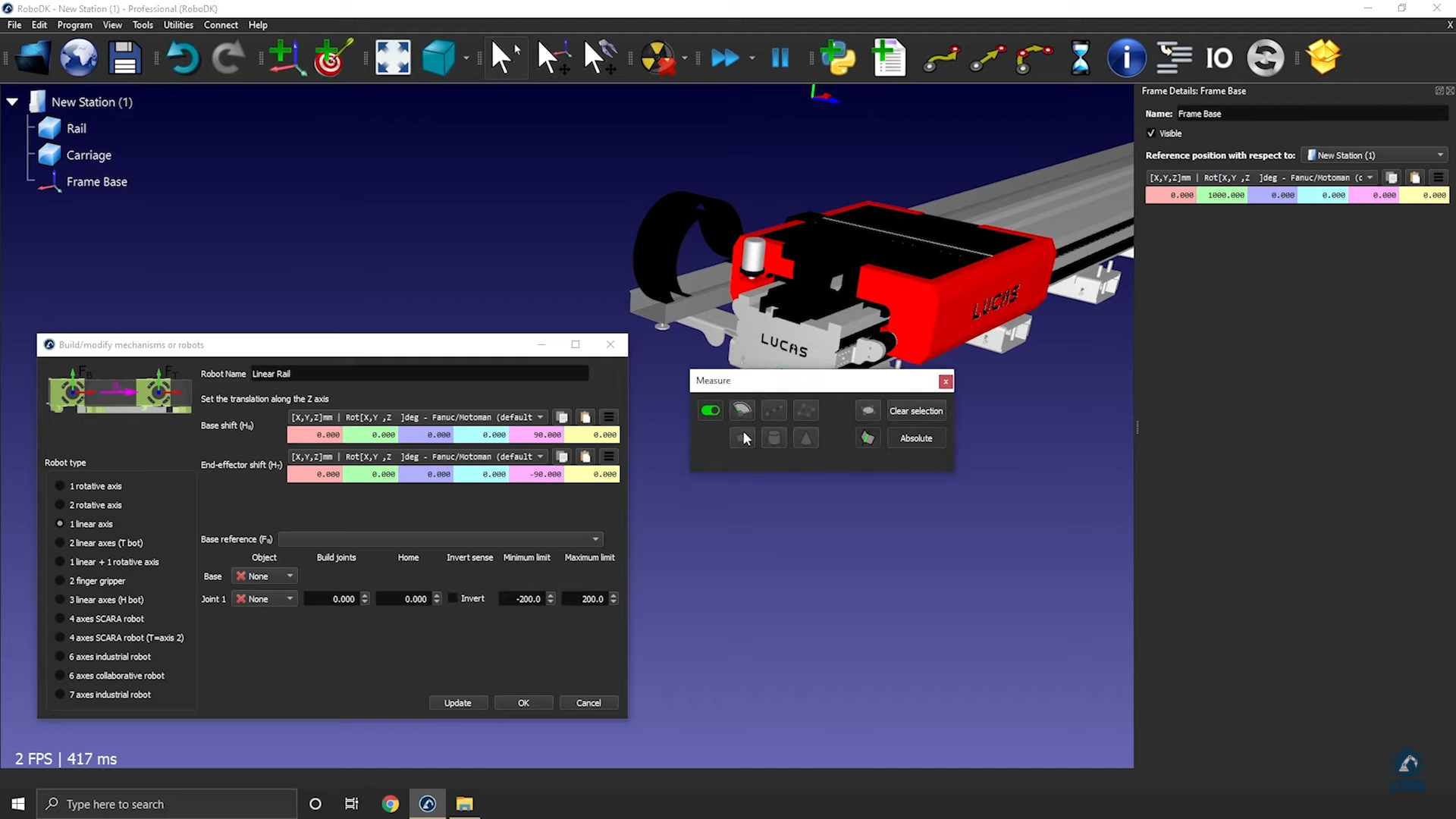
10.把值复制粘贴到Frame Base坐标系详情里(如下图所示)。
按照以下步骤检查方向并输入导轨长度:
11.绕X轴顺时针旋转90度:在参考坐标系位置窗口中输入 -90.000度
12.在模型机械结构窗口中输入轨道的长度(如下图所示)。
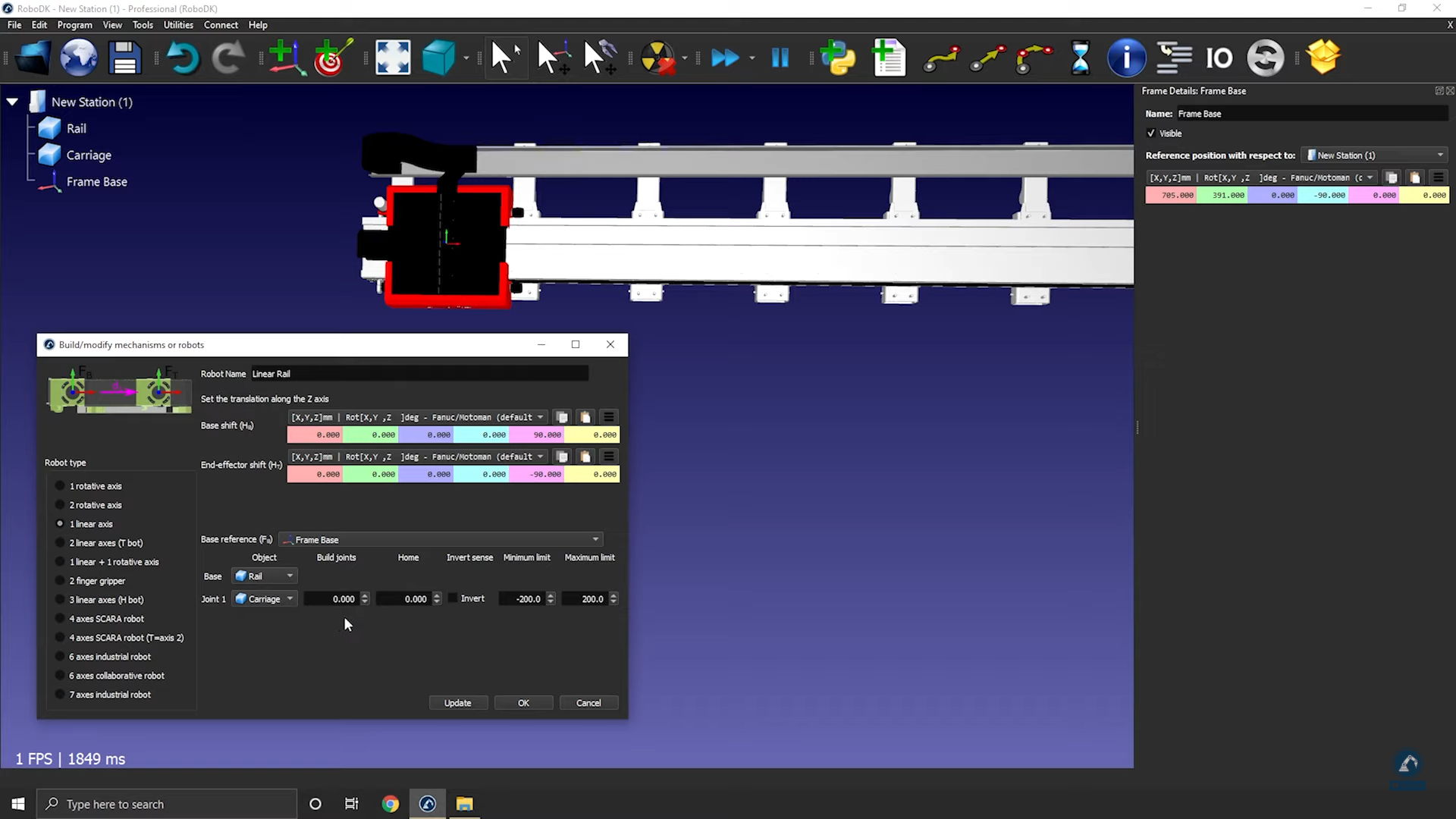
13.在建模窗口点击更新,即可创建机器人。
14.你可以通过“手动调节关节轴”测试轨道限位和移动方向是否符号预期。
15.核准无误后选择 "确定",完成建模。
如何建模2轴直线导轨
本示例展示了如何建模一个双轴线性导轨,也称为线性轴或线性轨道。线性轴用于扩展机器人手臂的工作范围。
Video:如何制作2轴直线导轨:https://www.youtube.com/watch?v=7_8yPS7SV2s
按照以下步骤导入3D模型:
1.将 3D 模型导入 RoboDK,将 STEP 文件拖放到工作站中。
2.打开机械结构生成器:实用程序➔建模结构或机器人。
3.下拉选项中选择:2个移动轴(T bot)"。
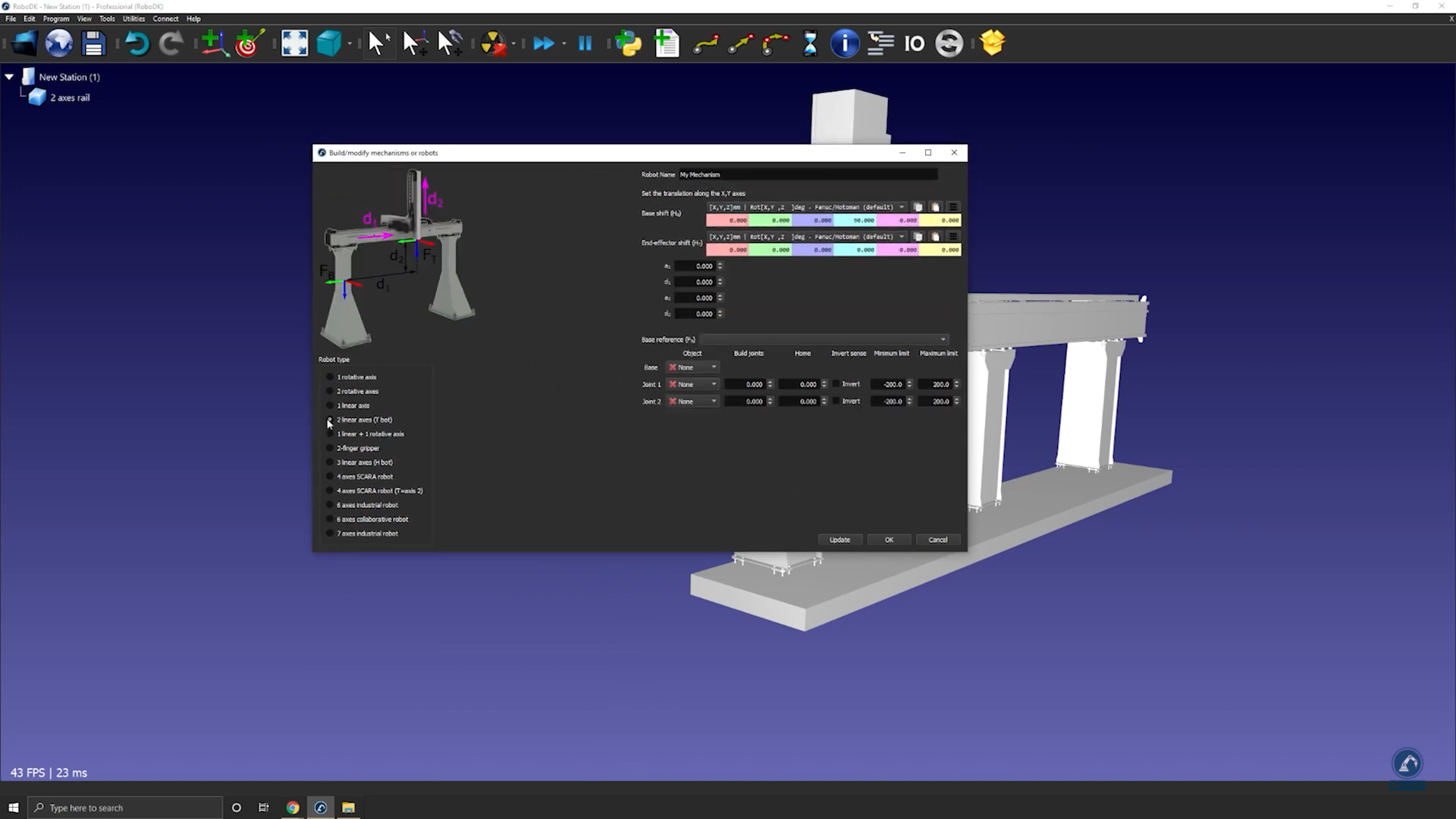
Note:基坐标系(FB)要位于工作站的原点。
Note:如果你需要将物体分割成多个(用于测量),如果你需要更改机械结构的颜色,请按照六轴机器人的建模步骤进行操作。
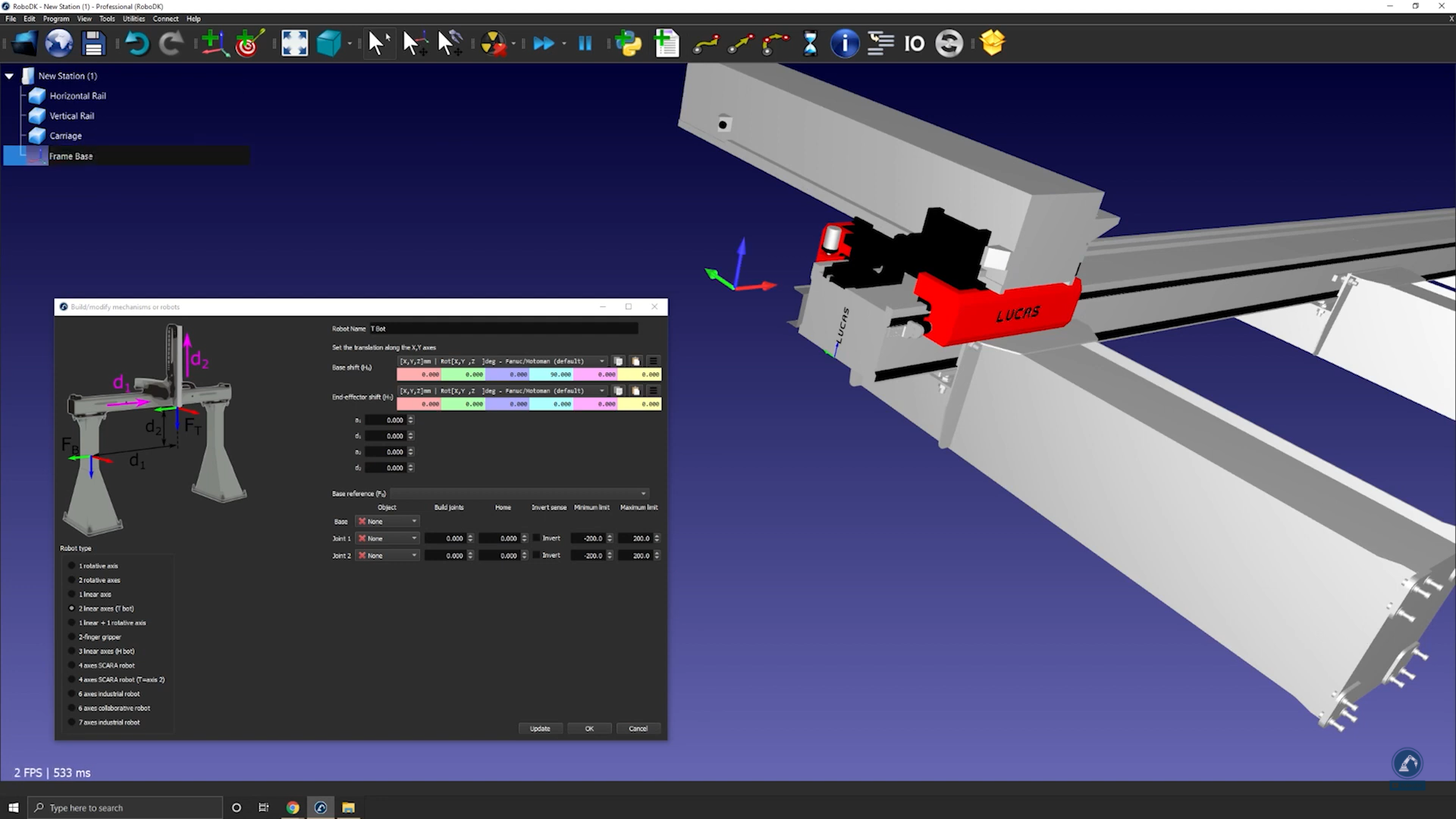
4.将模型分割成 3 块后,重新打开轨道生成器:选择实用程序➔建模结构或机器人。
5.选择选项:2个移动轴(T bot)。
6.将机械结构重命名为T-bot(在机器人名称下)。
按照以下步骤定位基坐标系的位置:
7.考虑基坐标系置于导轨的0位置:在此处创建一个参考坐标系,并将其命名为 "Frame Base"。
按照以下步骤调整基坐标系位置:
8.双击基坐标系,打开坐标系详情面板。
9.打开测量工具,测量表面中心的位置:工具➔ 测量。
10.在测量工具中点开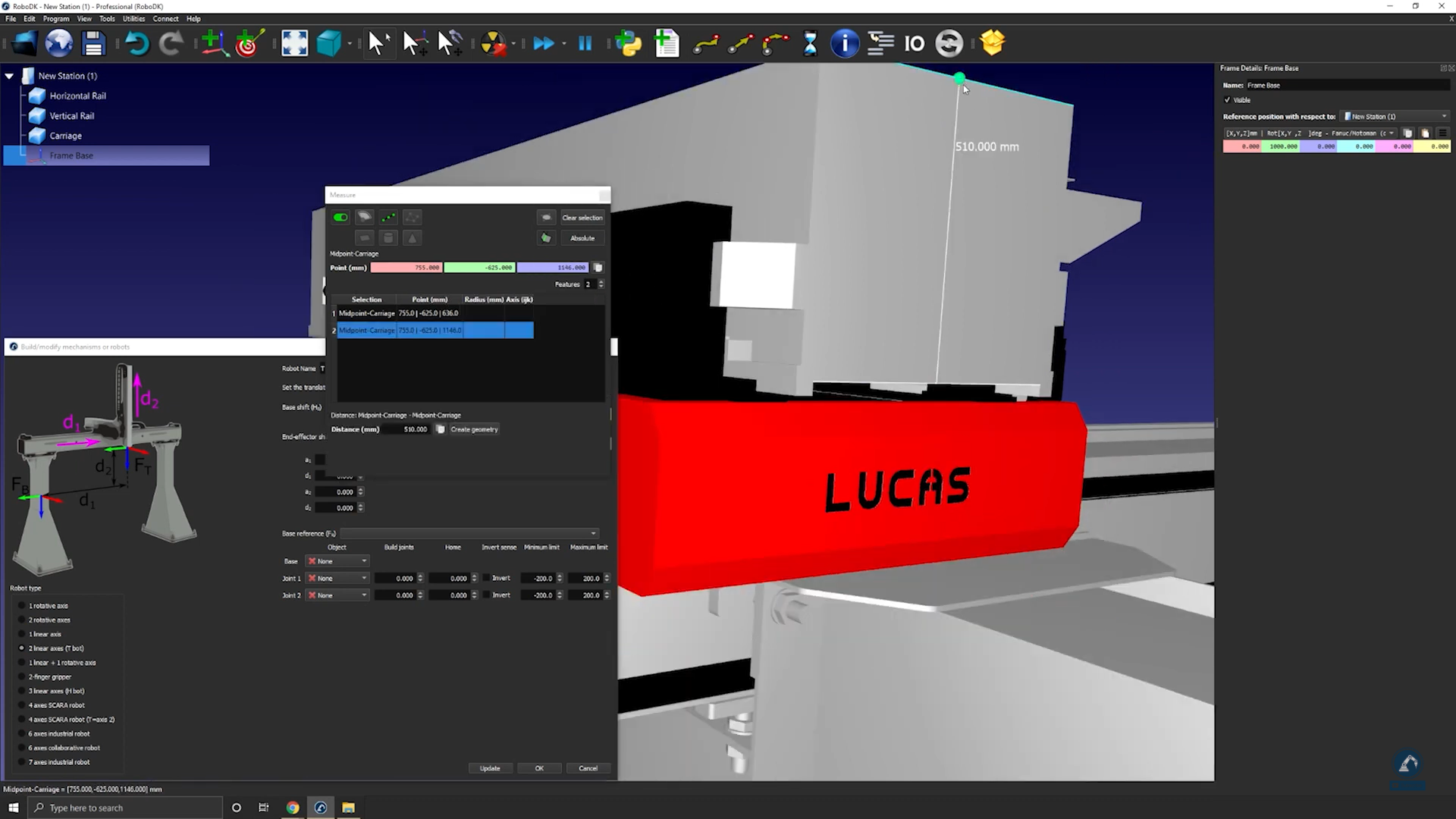
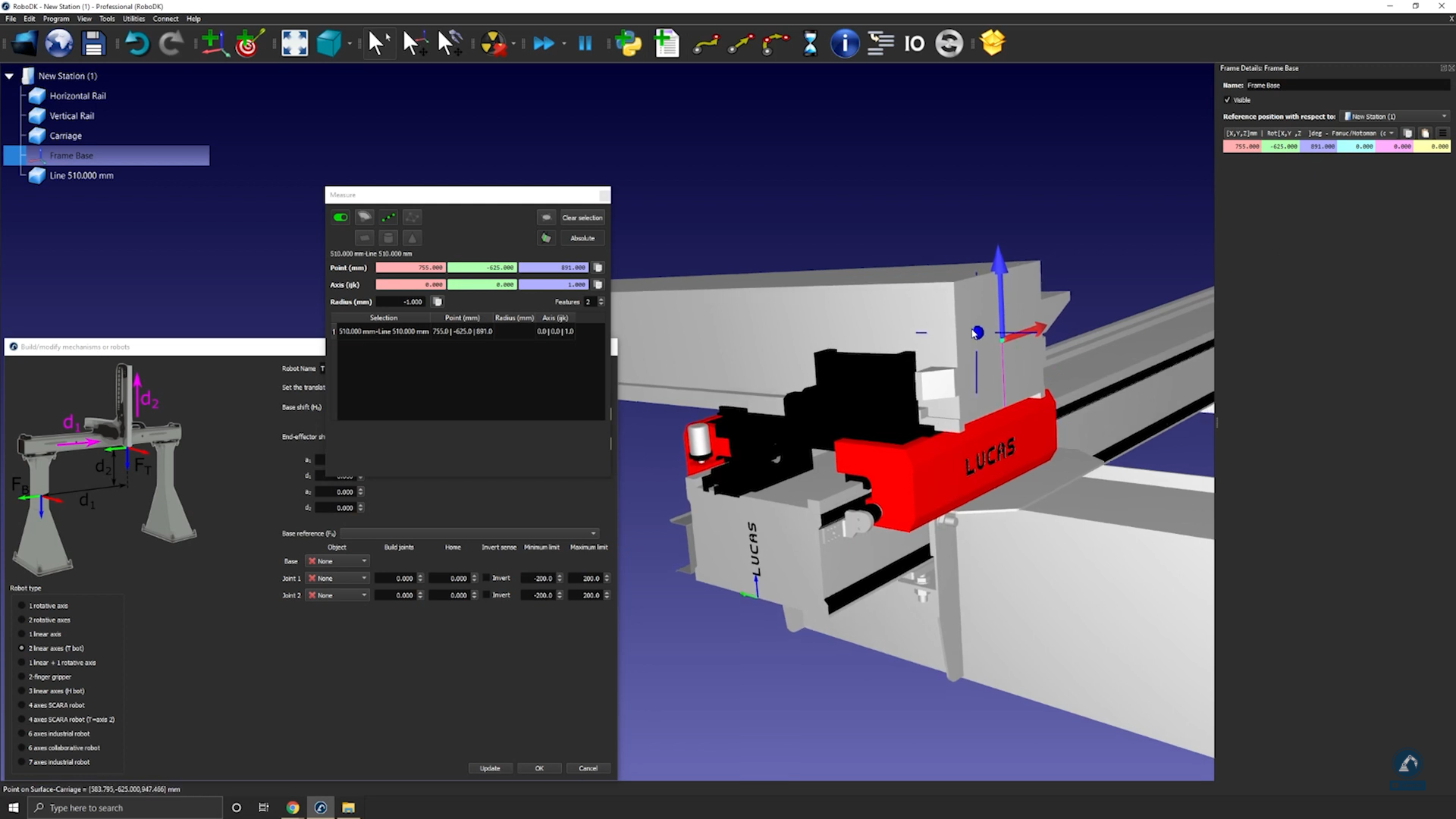
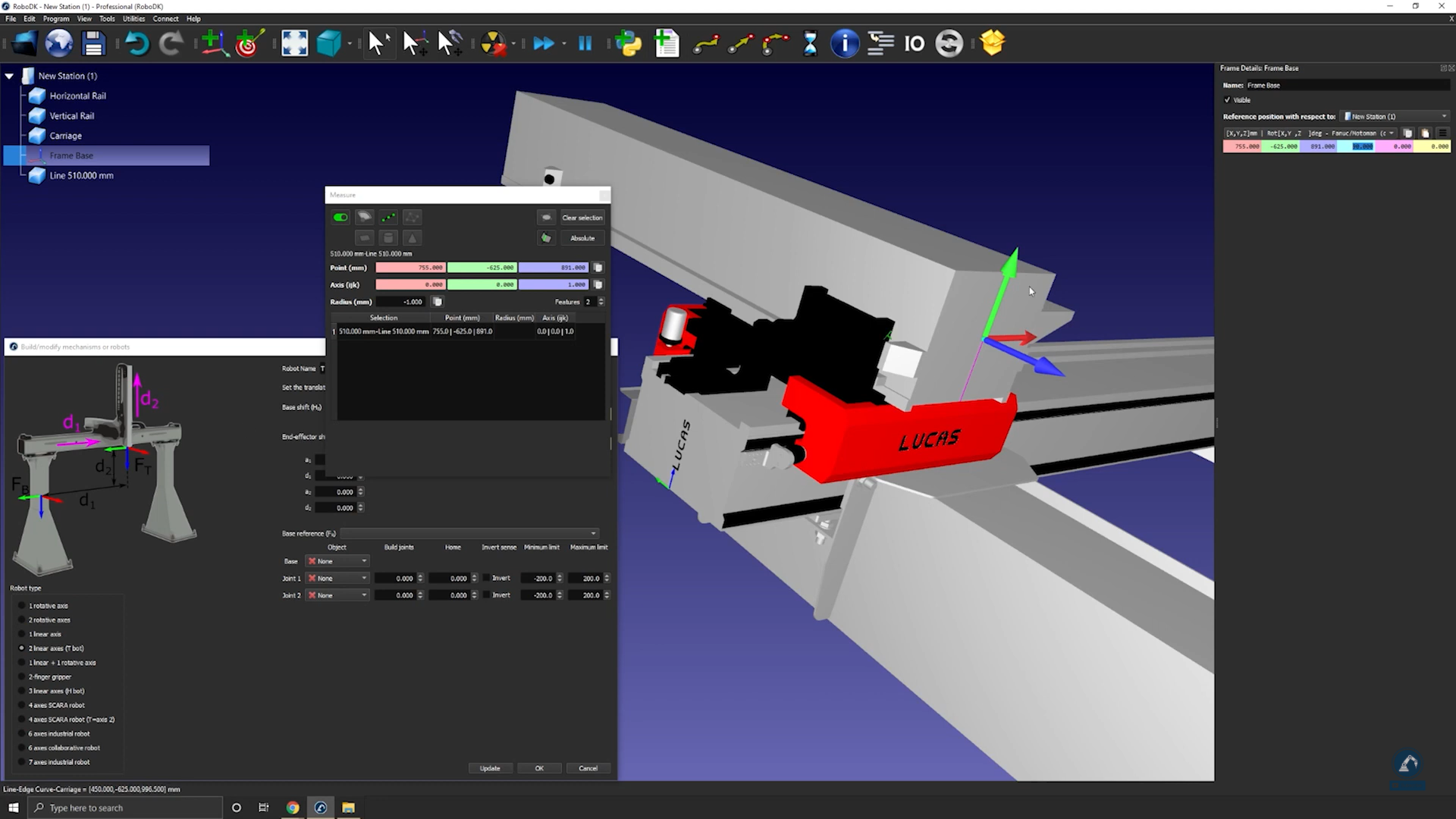
11.在 "测量 "窗口中选择 "创建几何体",在两点之间创建一条直线。
12.选择清除选择。
按照以下步骤测量两条线之间的中心点位置:
13.选择线条的中心点。
14.复制 "测量 "窗口中的数值,并将数值粘贴为坐标系位置(如下图所示)。
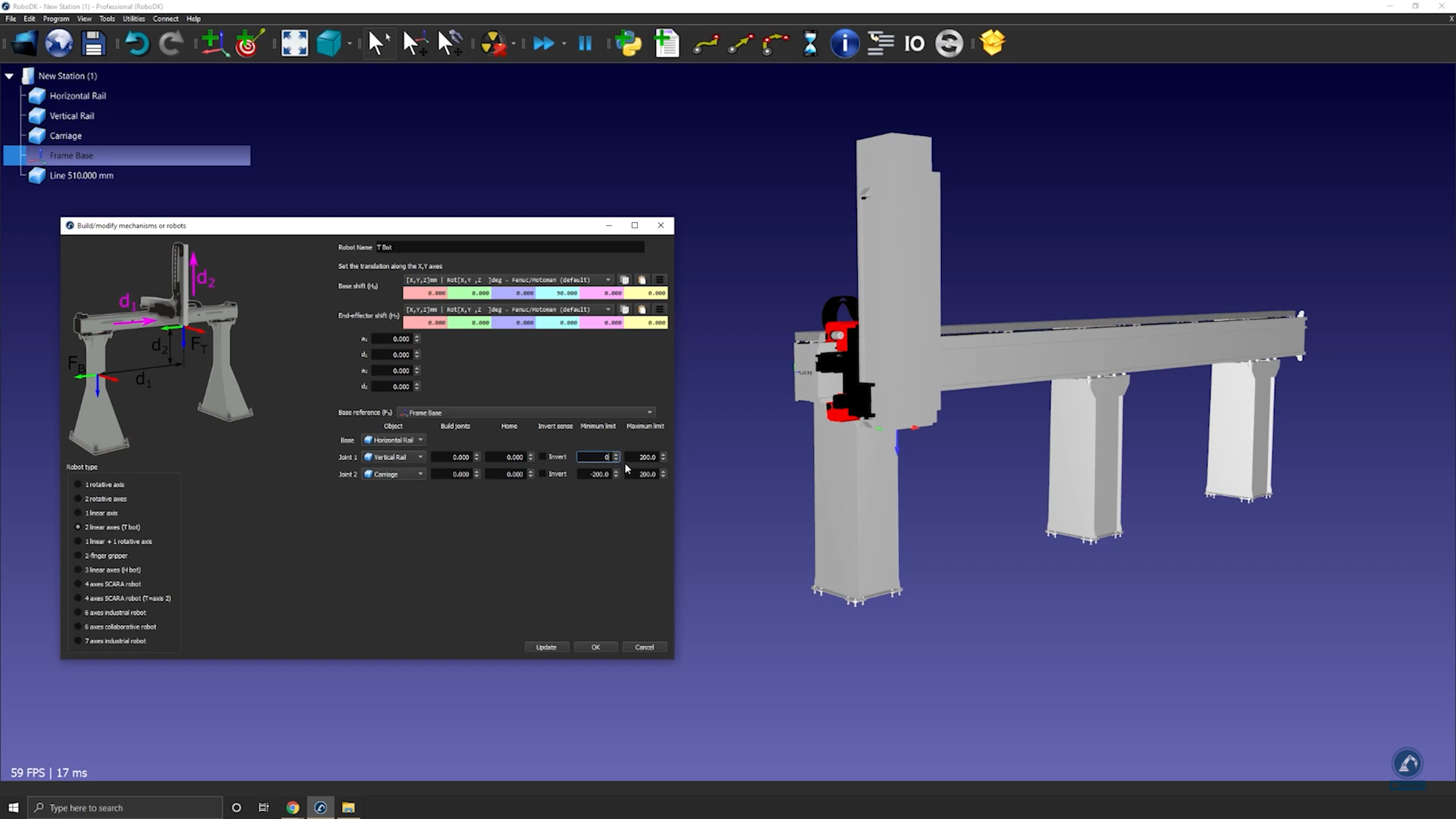
请按照以下步骤确保方向一致:
15.绕X轴逆时针旋转90度,然后绕Z轴旋转90度(如下图所示)
16.在"建模结构或机器人"窗口中输入导轨的测量值,如下图所示。
17.选择更新,创建机器人。
Note:你可以双击机器人,并手动调节关节轴,检查轴的运动方向是否正确,关节限位有无问题。
18.如果对结果满意,请在 "机械结构或机器人模型 "窗口中选择 "确定"。
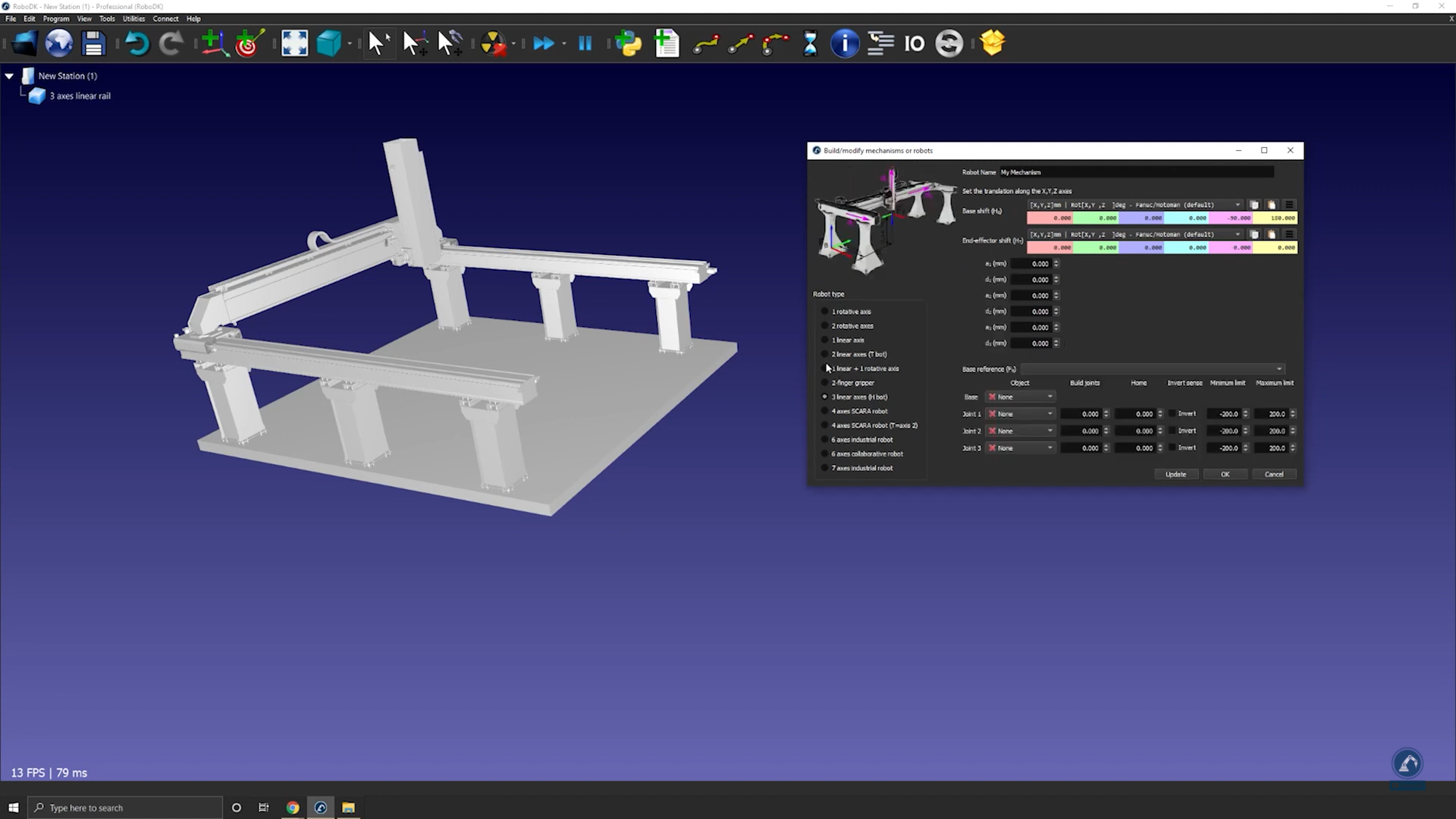
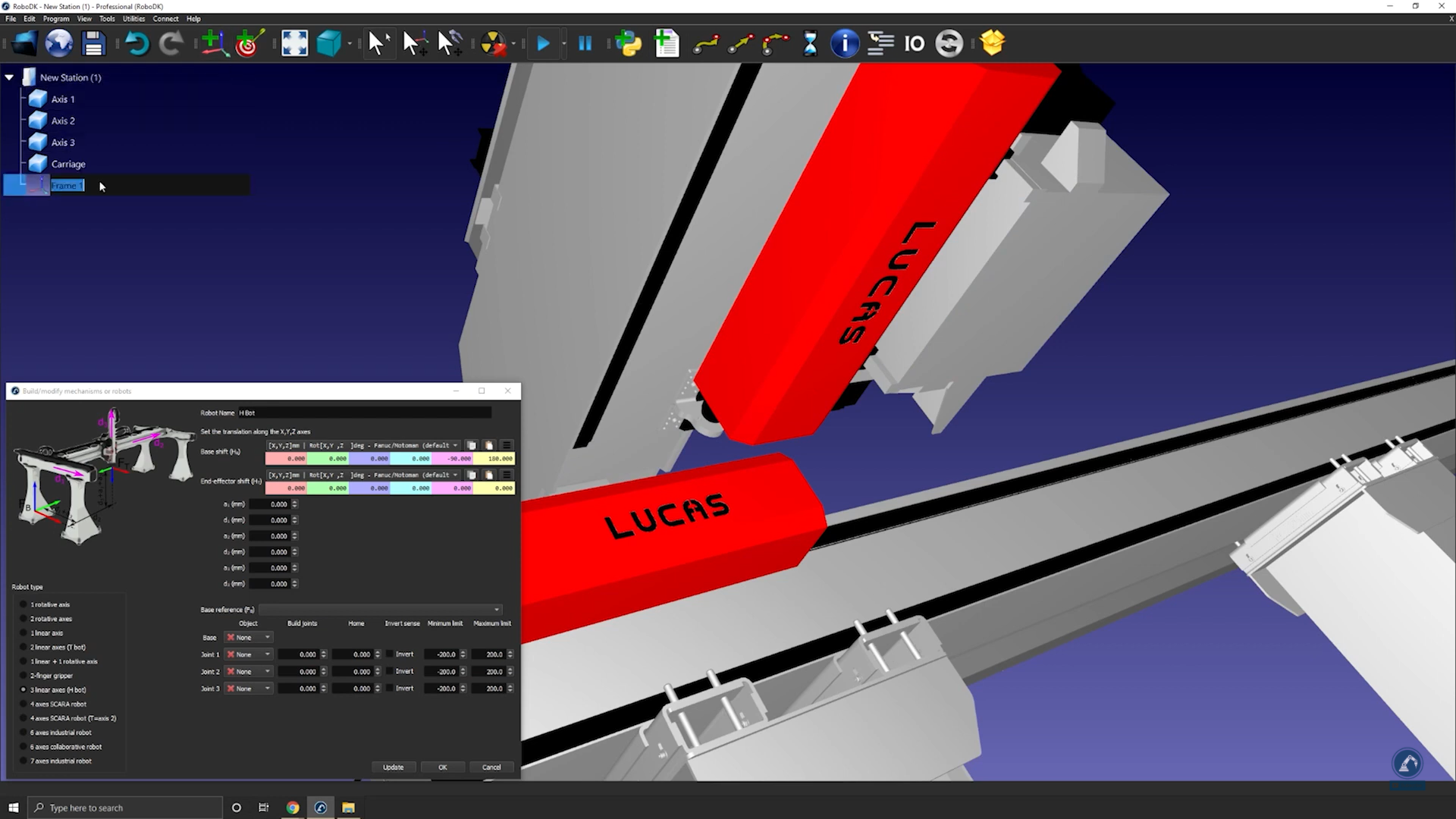
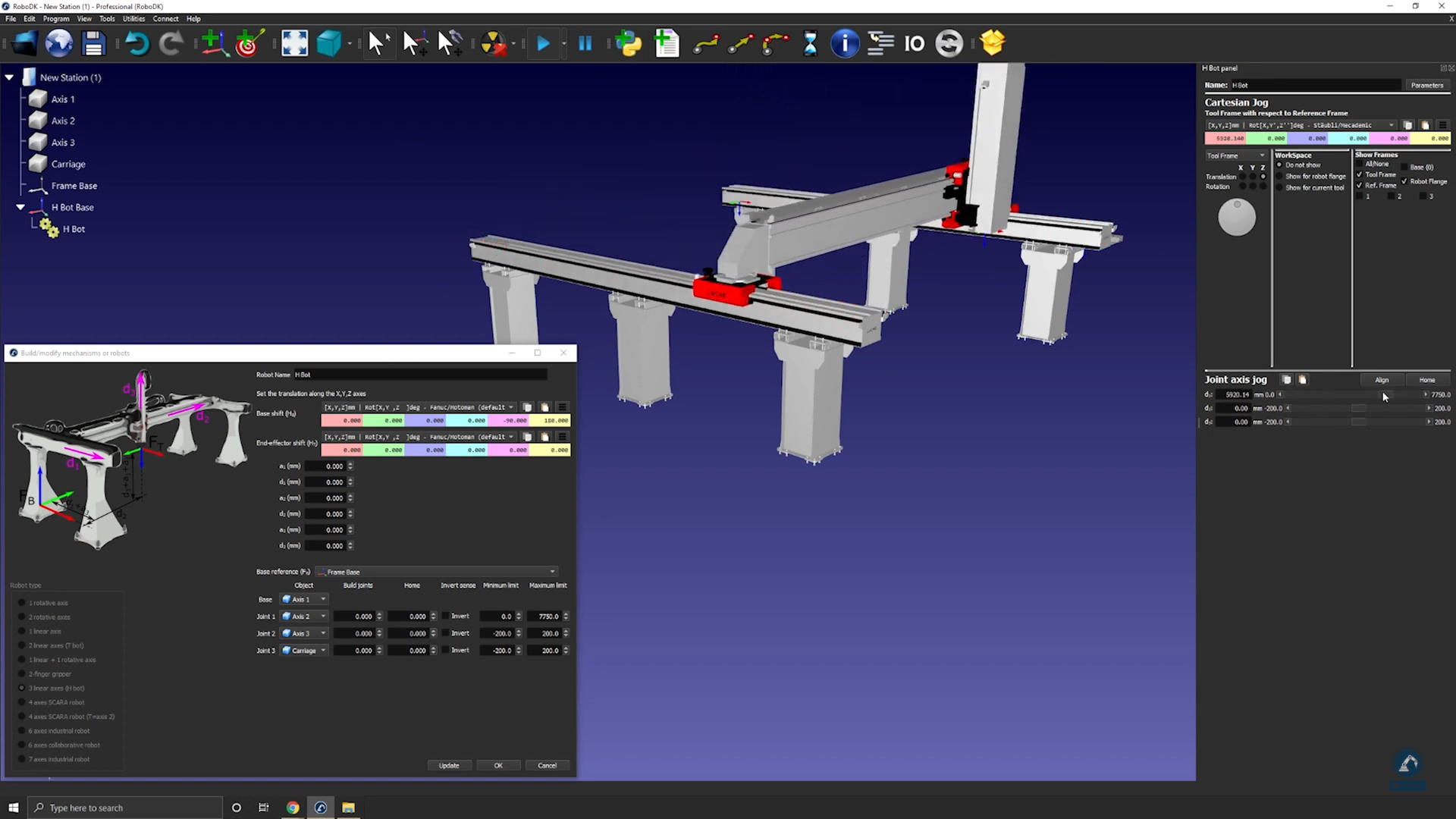
如何建模3轴机械装置
以下视频演示3轴机械装置(H-Bot结构)的建模方法。该机构可通过在外部轴向安装机械臂实现工作范围扩展。
Video:三轴机械装置的建模实现过程https://www.youtube.com/watch?v=L1wG93rRZS0
按照以下步骤导入3D模型:
1.在 RoboDK 中拖放 3D 模型(STEP 或 IGES 文件),将其加载到工作站中。
2.打开机械结构生成器:选择实用程序➔建模结构或机器人。
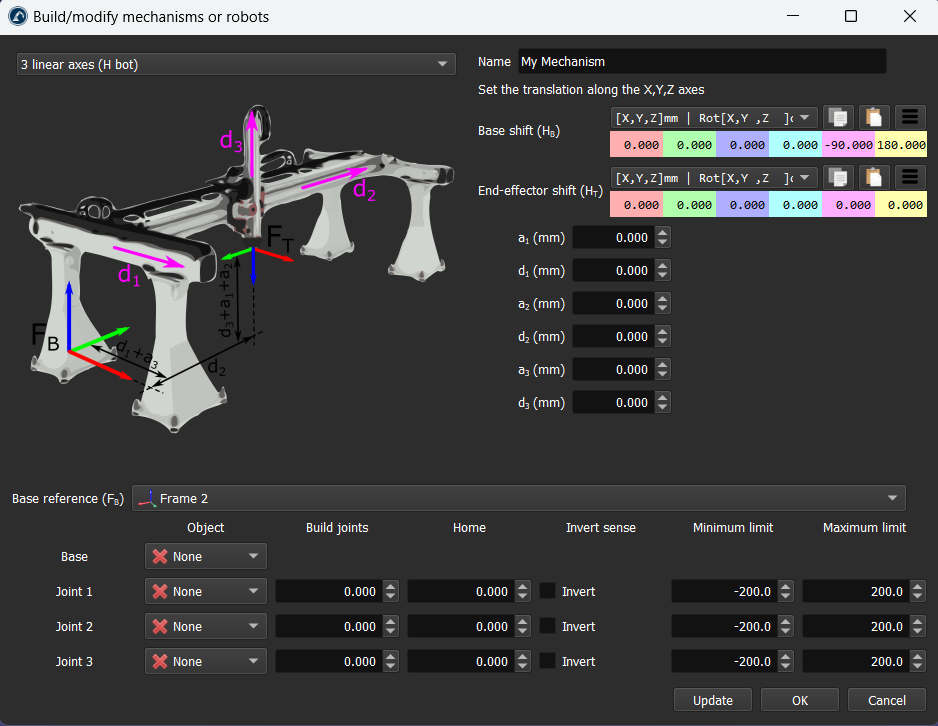
3.在下拉选项中选择:3个线性轴(H-bot)。
Note:基准坐标系(Fb)位于机械结构的 0.00 位置。
Note:当你需要将物体分割成多块,你可能需要改变机械结构的颜色,可以按照六轴机器人建模教程中的步骤进行操作。
按照以下步骤创建基坐标系:
4.当你把对象分割成不同部分后,需要重新打开机械结构生成器(通过点击实用程序➔建模结构或机器人➔ 3个线性轴(H-bot))。
5.你可以给机械结构命名为H-bot。
6.在轨道的 0 位置创建基坐标系,比如Frame Base。
按照以下步骤调整基坐标系的位置:
7.双击Frame Base,打开坐标系面板。
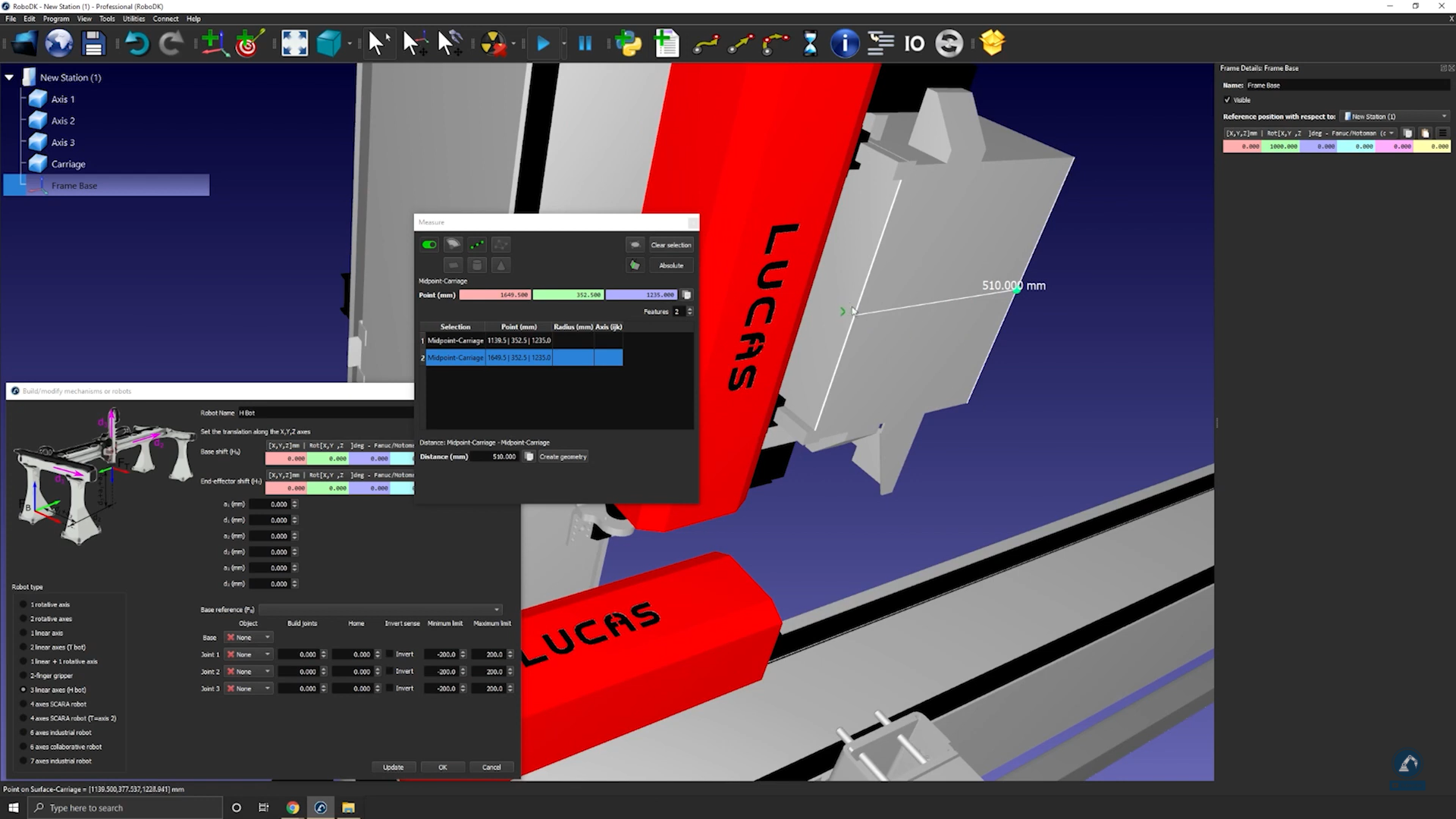
8.然后打开测量工具:工具➔ 测量。
9.在测量工具中点开
10.在测量窗口,点击创建几何按钮,此时会在两个中心点之间生成一条直线。
11.现在两个点之间的线已创建,你可以在测量窗口 "清除选择"。
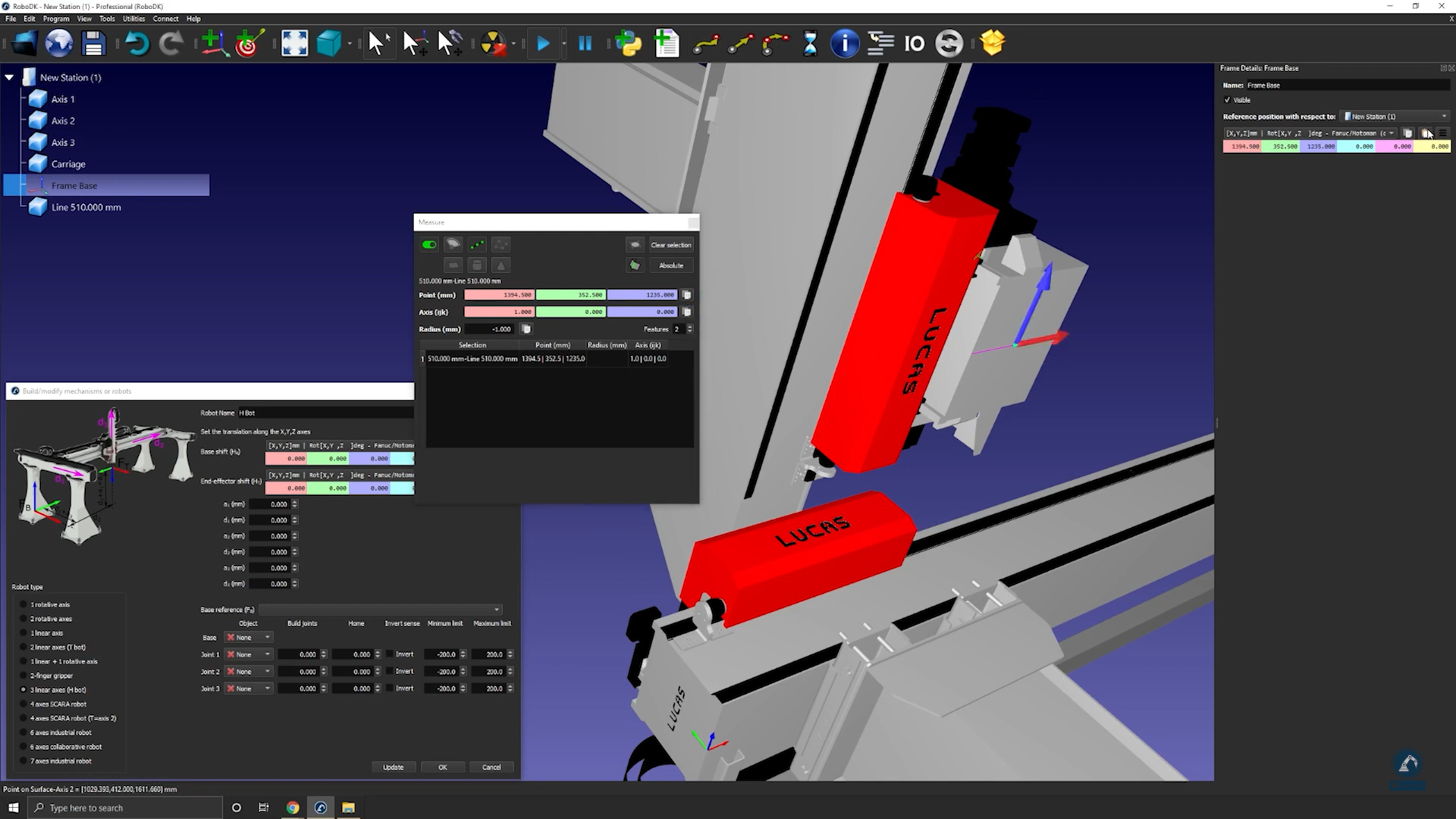
12.然后点击该直线的中心点,此点是新创建直线中心点。
13.复制数值并粘贴到基坐标系(如下图所示),确保坐标系位置与参考坐标系图像一致。
按照以下步骤确保方向一致:
14.逆时针旋转90 度。
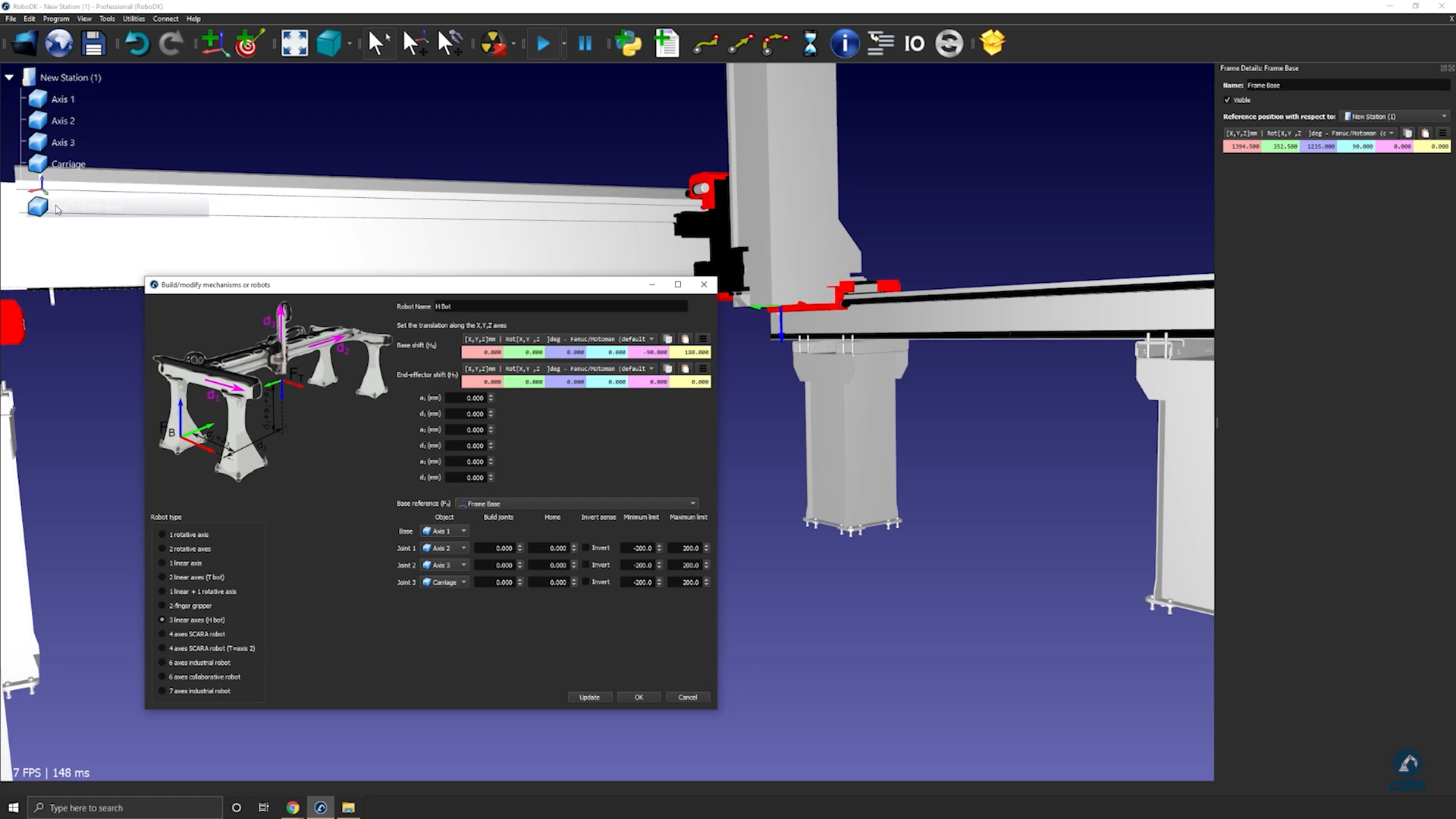
15.如下图所示,选择对应的坐标系,然后逐个为每个轴选择物体对象。
16.在该窗口输入每根导轨的长度。
17.测试:在手动调节关节轴窗口滑动每个轴,确保每个轴滑动的范围符合预期。
18.测试完每个轴后,按 "更新 "键,即可创建机械结构了。
19.如果一切正常,此时选择确定,这个机械结构就完成了。
Note:如果轴未按预期方向移动,你可以在机械建模器中勾选每个轴的“反转”选项来调整角度。
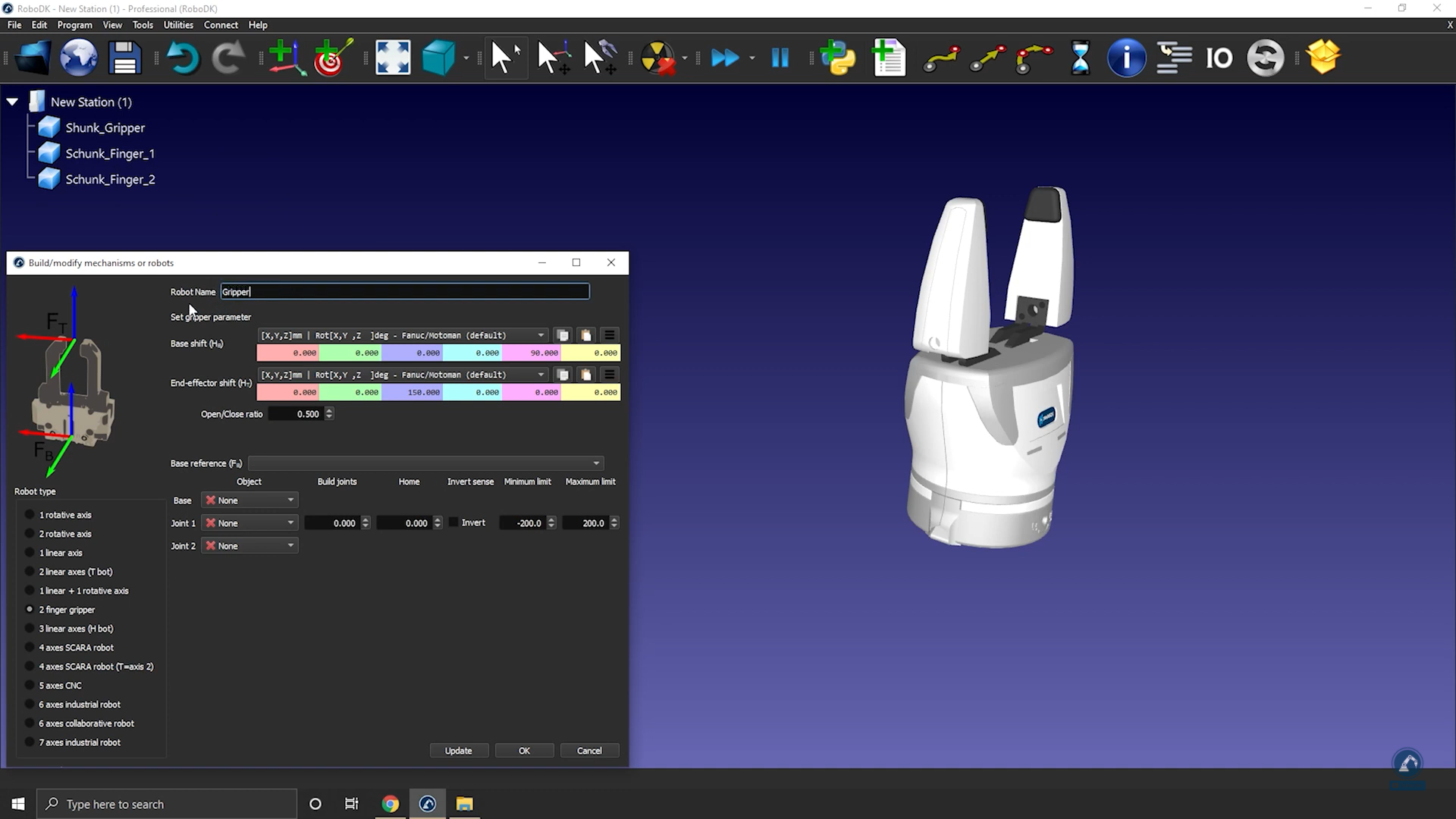
如何建模2指平行夹爪
通过"建模结构或机器人",你可以建模一个平行夹爪。平行夹爪也称为双指夹爪,可以让机器人抓取部件。
Video:如何制作双指夹爪:https://www.youtube.com/watch?v=kK4PRTjOZ48
按照以下步骤导入3D模型:
1.导入 3D 模型:拖放 STEP 文件将其载入工作站(IGES 或 STL 文件也可以)。
2.打开机械结构生成器:实用程序➔建模结构或机器人。
3.下拉选项中选择:2个抓手。
4.你可以给机器人命名为:2 finger gripper。
按照以下步骤调整坐标系:
5.创建参考坐标系,这里应位于夹爪下方,命名为:Frame Base。
6.确保刚才创建的坐标系根据图像定位:将参考坐标系调至 0.000 mm (X,Y,Z)。
Note:将夹爪手指置于原点(0 毫米)可以简化操作。如果希望零点位置是夹爪闭合的位置,则将手指向中间移动,直到手指相触。
7.在机械结构生成器窗口中输入夹爪的运动范围:如果将手指置于 0 位置,则最小限值为 0,最大限值为 80。
8.选择更新,此时会出现一个
9.双击
10.如果确认没问题,就可以在机械结构生成器窗口选择确定。
如何建模6轴机械臂
本示例展示了如何利用制造商提供的3D模型,从零开始为一个 6 轴工业机器人手臂建模。
Video:机械臂建模视频https://www.youtube.com/watch?v=-woD7T27hGQ
获取机器人模型:
1.你需要获取到原始的3D 模型(如 STEP 或 IGES 文件)。
2.你还需要找到机器人数据表或机器人手册。
打开机器人模型窗口:
3.在菜单栏选择:实用程序➔ 建模结构或机器人。
4.在下拉选项中选择:6 轴工业机器人。
通过以下操作将机器人3D 文件加载到 RoboDK 中:
5.通过点击文件的方式打开机器人,或者拖放到工作站的模式。
Note:有些 STEP 文件在加载时没有颜色,例如,如果你加载的是库卡(Kuka)机器人,它应该是橙色而不是灰色)。在这种情况下,你可以通过选择工具➔ 改变颜色完成变色。你也可以点击机器人的各个部分,选择 "移除",将颜色移除。
请按照以下步骤将物体分割成不同的片段,这样我们就可以分别处理每个片段:
6.如果你下载的 CAD 文件是单个物体,你可以右键点击物体,选择分离物体来取消对物体(STEP 文件)的分组。
7.然后,你可以将其重新组合,制作出机器人的不同部件。
请按照以下步骤在 RoboDK 中输入机器人运动学信息:
8.在 "机器人名称 "中输入机器人名称。
9.如果你的机器人部件顺序正确,那么所有 3D 模型都应正确填充。否则,你可以手动将每个物体链接到正确的机器人关节。
10.打开数据表,填写机器人的尺寸。
11.在数据表的 3D 草图上,你可以找到所需的所有值。在 RoboDK 中填写正确的值。
12.如果一切正常后,在窗口选择:更新。
Note: 使用机器人面板逐个移动关节,以确保你输入的测量值正确无误。
如何将机器人关节耦合在一起
有些机器人的两个关节耦合在一起,这意味着机器人的两个关节是相依的。例如,发那科(Fanuc)机器人的关节 2 和关节 3 联在一起。
请按照以下步骤在 RoboDK 中连接机器人的关节:
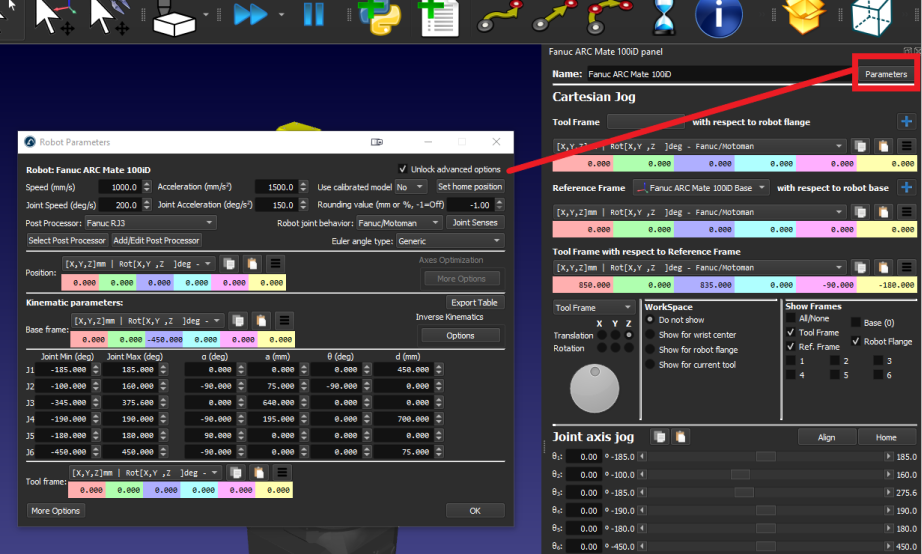
1.首先,双击机器人,打开机器人面板。
2.点击机器人名称旁"参数"选项卡。
3.勾选解锁高级选项。
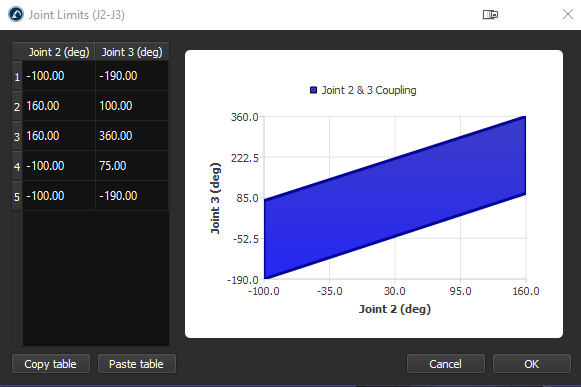
4.在机器人参数窗口,点击关节方向,此时会打开关节轴方向的选项卡。前6个数值代表关节的旋转方向,最后一个数值是关节2和3的耦合。将第7个数值改为-1以连接关节。此时会弹出一个带有耦合关节限制多边形的新选项卡,你可以编辑这些限制,以防止机器人发生自碰撞。
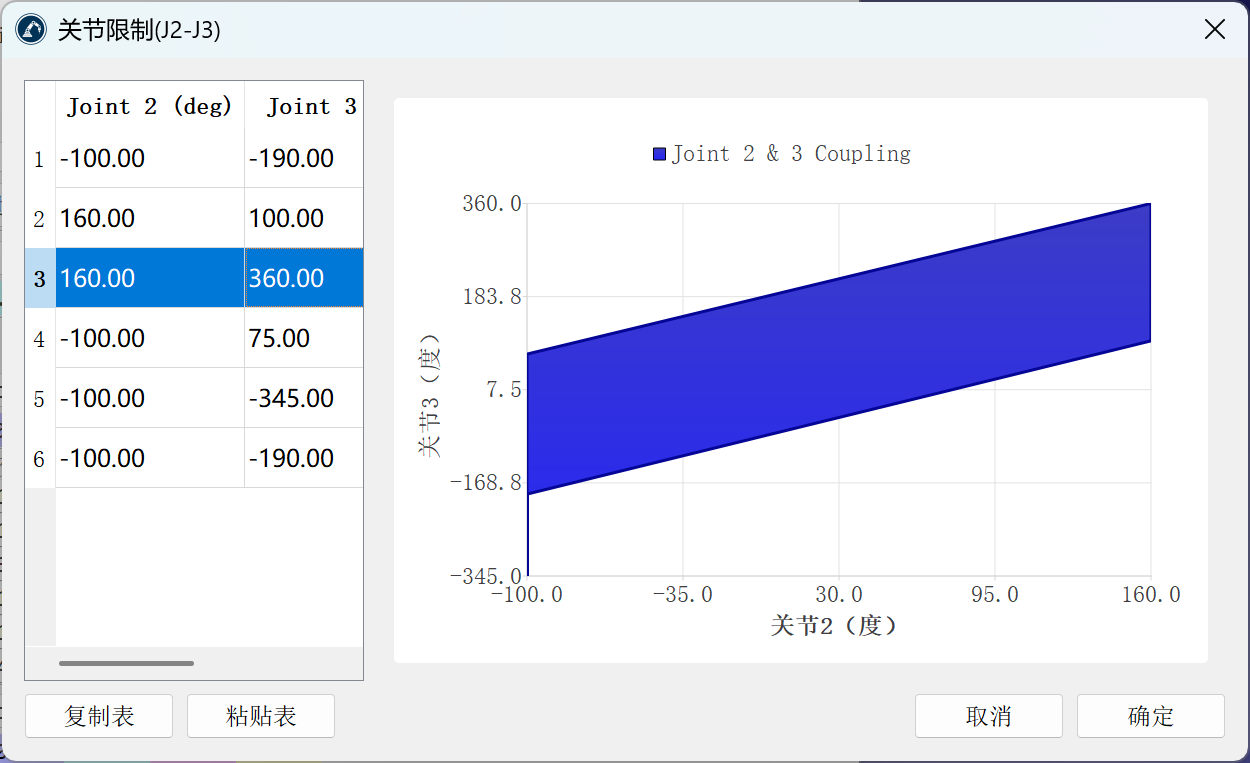
Note:耦合关节将使关节2和3一起移动,将值改为1而不是-1将反转关节的耦合方向。
同步外部轴
该功能是指将机器人手臂与外部附加轴进行同步控制。外部轴既可单独用作定位装置,也能与机器人控制器同步联动。同步后,机器人本体与外部轴可同时运动,并保持相对于坐标系的高精度线性运动。
Note:并非所有机器人控制器都支持本体与外部轴同步运动。若控制器不支持,请勿强行同步,但仍可将外部轴作为定位装置使用。
通过RoboDK,最多可为任意机器人同步6个附加轴(6轴机器人+6附加轴=12轴系统)。
操作步骤:
1.从库中加载外部轴模型,或通过建模结构或机器人建模。
2.构建RoboDK 工作站:将机器人与外部轴/机构置于实际布局位置。
Note:使用直线导轨时,需在树形结构中使机器人嵌套于导轨下,如下图所示。
Tip:可通过添加参考坐标系实现对象间的相对定位。
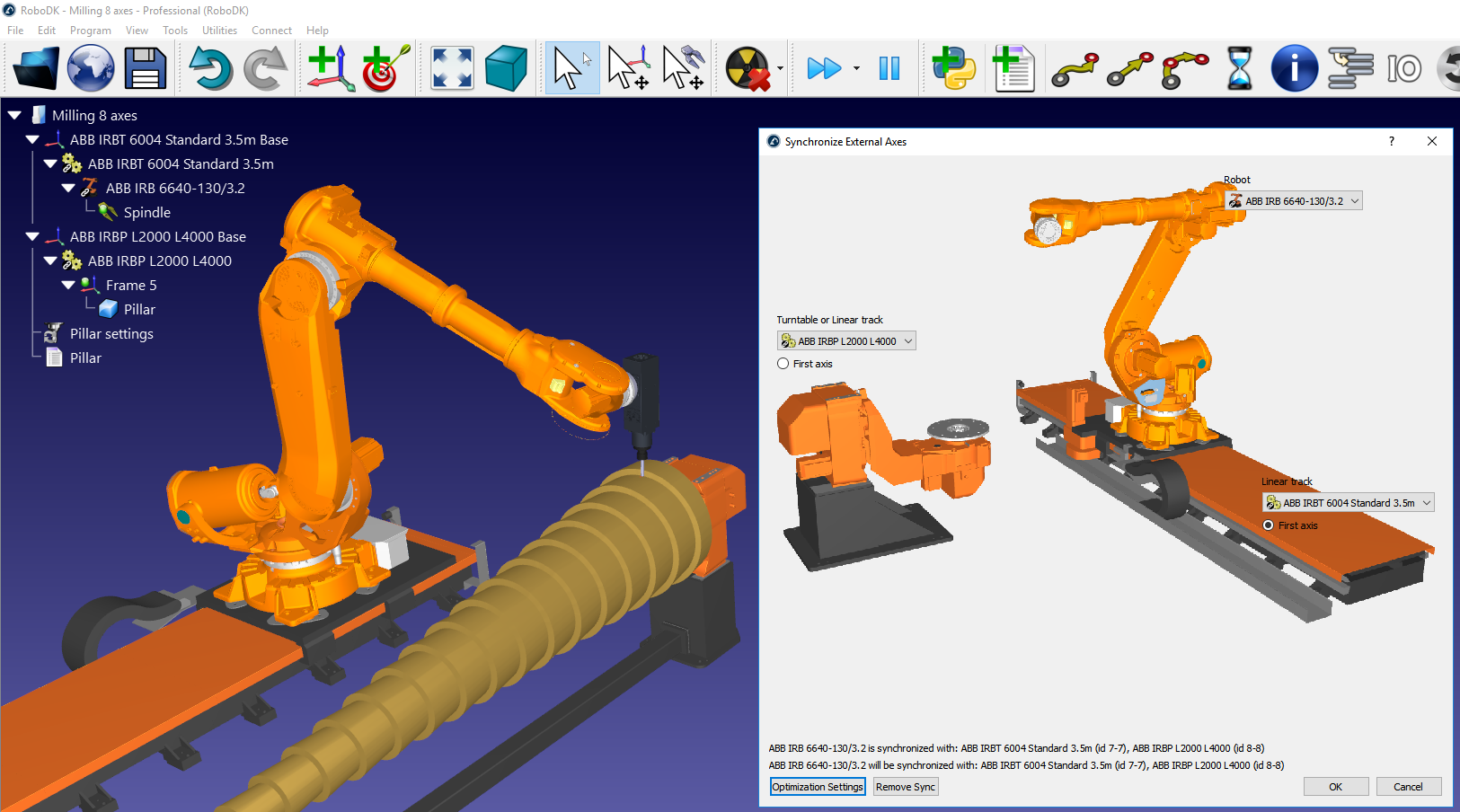
3.在菜单栏选择:实用程序➔ 同步外部轴。
4.选择机器人后,可用转台/直线导轨将显示为可同步状态。
5.选择 "确定"后,机器人控制面板将显示蓝色标记的附加轴。
同步机器人的目标点会以蓝色显示附加关节值。生成程序时可指定定位装置的优选位置,笛卡尔目标点将在路径运动中保持既定坐标位置。
机器人加工设置中会显示外部轴优选位置选项,且后处理器导出的每个运动指令都将包含外部轴位置数据。
Tip:双击控制面板中的轴限位值可更新关节限制。
Tip:若库中没有外部轴模型。你可以在主菜单栏选择实用程序➔建模结构或机器人,通过这个功能自定义。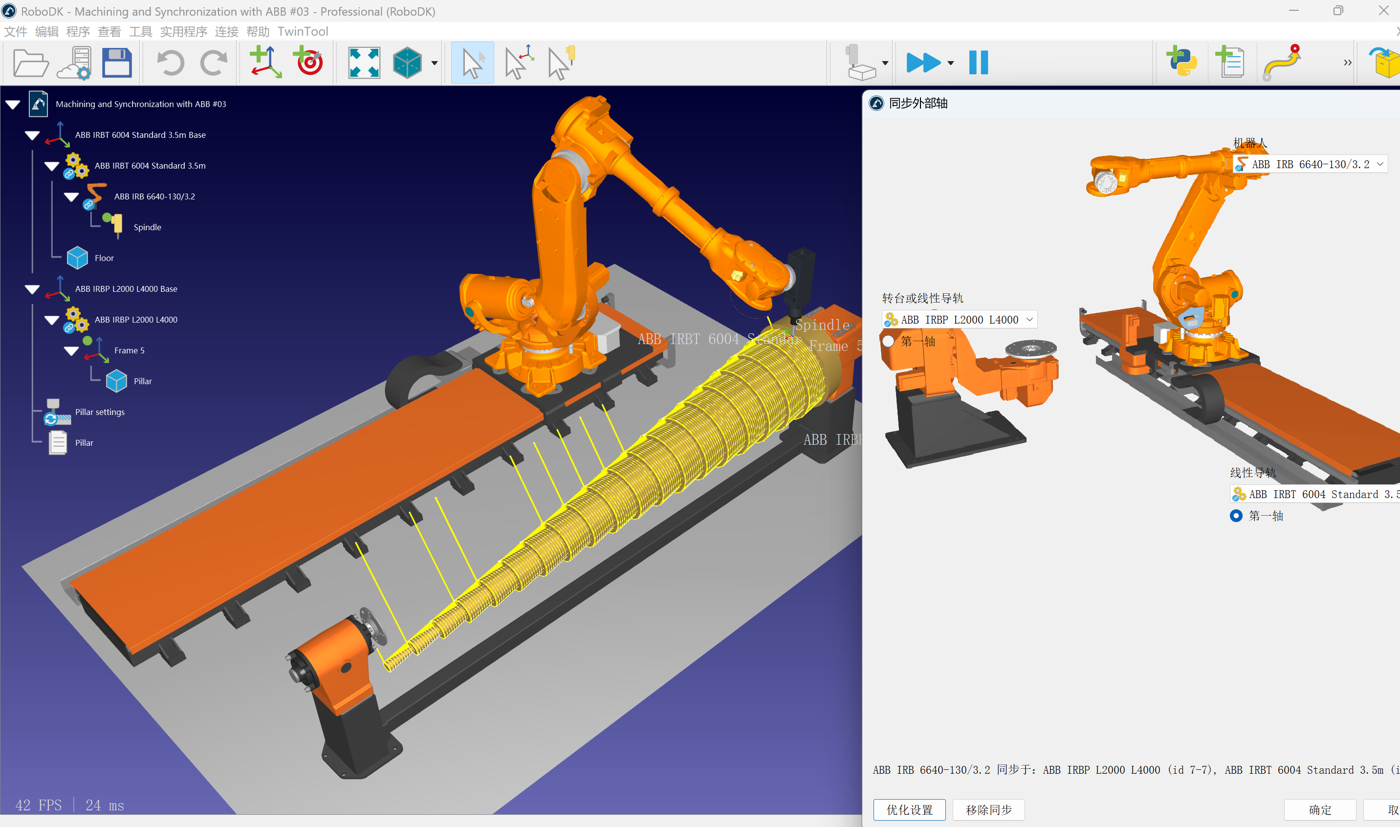
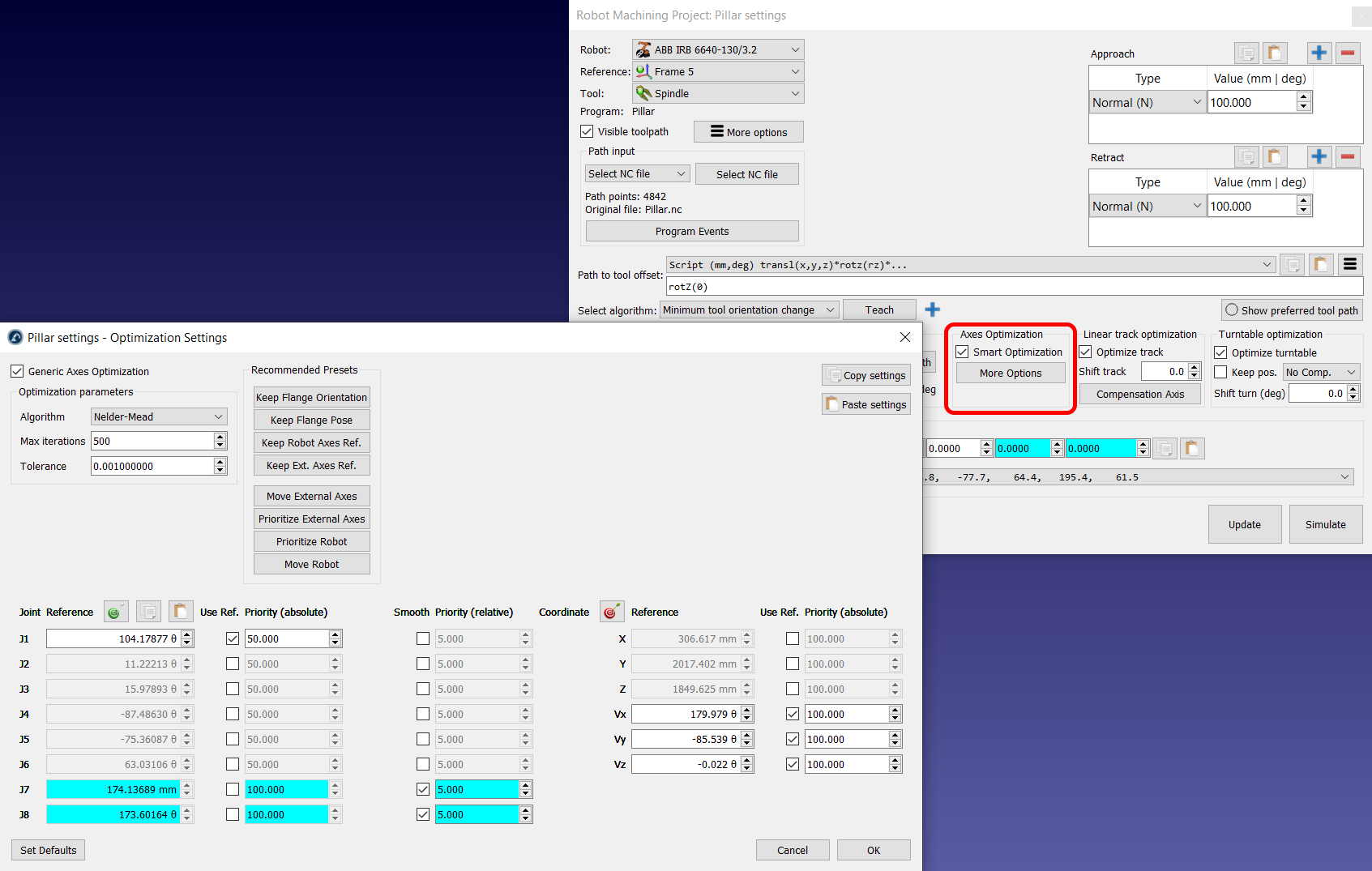
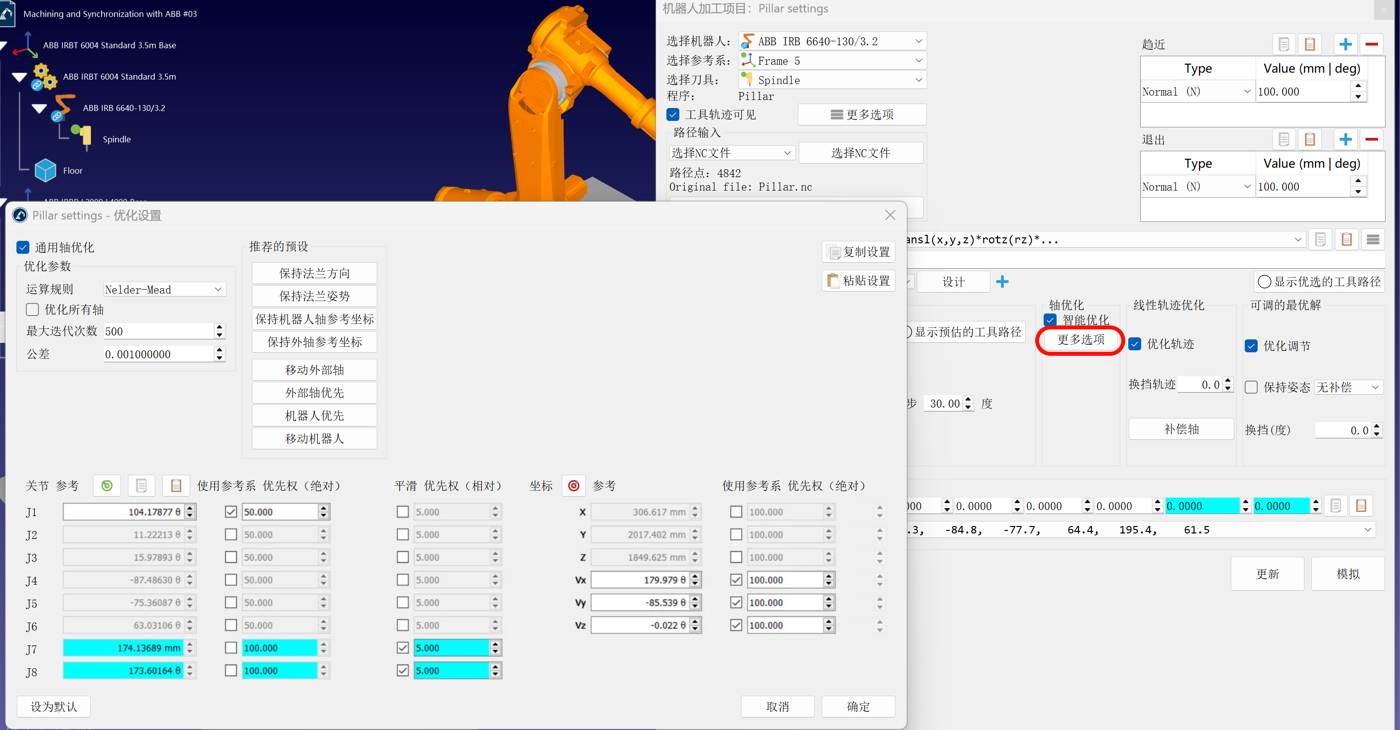
优化外部轴运动
当机器人同步了一个或多个外部轴时,你可优先驱动特定轴,并根据优化标准调整机器人加工、曲线/点跟踪及3D打印项目的运动策略。
在机器人加工项目窗口有一个“轴优化” 模块,点击“更多选项”,即可配置外部轴优化参数。你可基于以下准则设置优先级:
你可以根据以下标准提供不同的优先级:
●保持参考关节位置:为部分(或全部)关节设定目标位置。权重越高,程序运行中越倾向于匹配该参考值。
●最小化运动(匹配上一位置):对特定轴的突变运动施加“惩罚”(相对运动优化)。
●保持参考姿态:设定机器人需维持的绝对法兰姿态(参考姿态为相对于静态基座的法兰位姿)。系统将根据参考姿态的X/Y/Z向量调整法兰朝向。
例如,选择“保持法兰朝向”预设时,RoboDK会优先维持法兰姿态与当前仿真中的机器人位姿一致(选择此预设将自动更新参考姿态)。若需让机器人关节1始终接近105度,可启用此优先级。
如果选择“保持机器人轴参考位姿”预设时,系统会更新位置参考值以匹配当前轴状态。此时机器人关节默认权重为100(高优先级),而外部轴权重为0(无偏好),但外部轴仍会保留权重5以避免突跳运动。
调整参数后,更新机器人加工项目即可生效。
Tip:若需完全锁定某轴运动,可输入极高权重(如100000)。
Note:此菜单不控制路径中的机器人位姿,仅优化路径各点位的外部轴位置。若使用转台,应通过 “转台优化”选项控制工具相对于运动参考系的姿态。