添加目标点
机器人位置可以被记录为目标。笛卡尔目标定义了工具相对于坐标系的位置。关节目标根据机器人关节值定义了机器人的位置。
Note:RoboDK默认创建的是笛卡尔目标(红色目标点
根据以下步骤添加两个机器人目标,分别定义为Home与Approach:
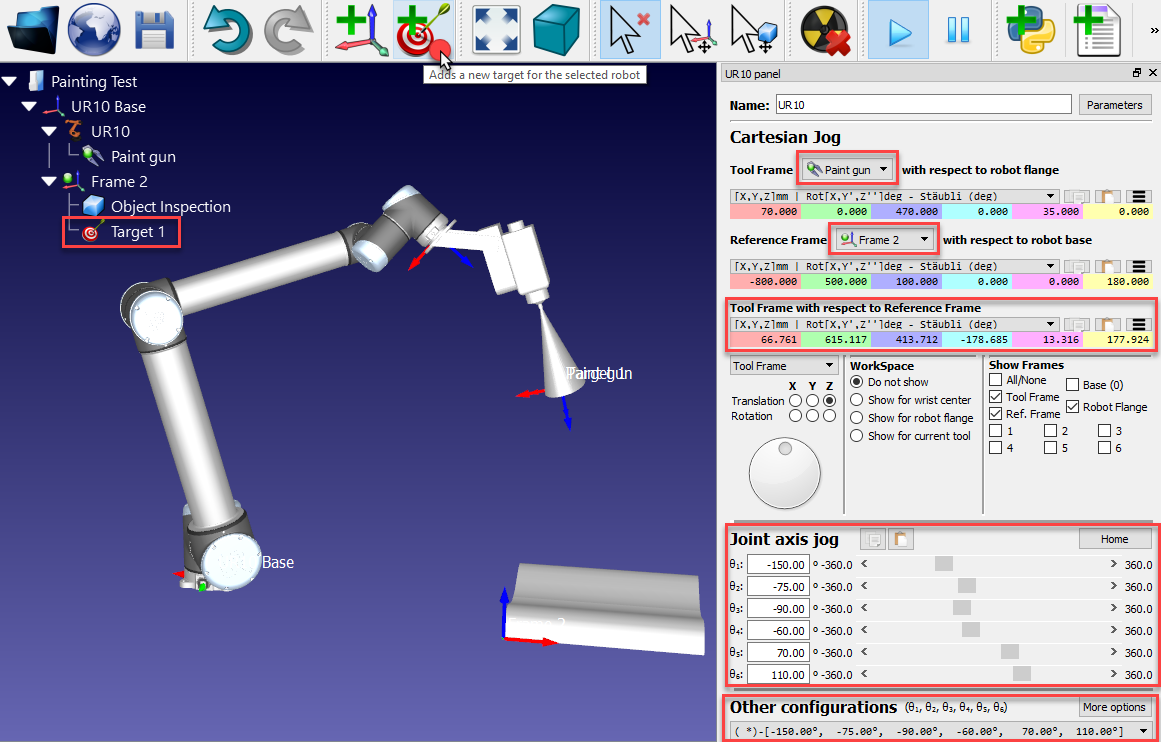
1.双击机器人以查看机器人面板。
2.选择工具Paint gun作为Tool Frame(机器人工具坐标)。当一个机器人工具或者参考坐标系被选为当前工具或坐标时,一个绿色的圆点会出现在该项目上。
3.选择Frame 2作为参考坐标系。
4.按下Alt键并拖拽机器人的TCP或者机器人法兰至一个不易与任何物体产生碰撞的安全位置。或者,以参考坐标系为基础移动Tool Frame(TCP)的坐标。
5.使用其他构型选择不同的机器人位姿,需确保机器人各轴都不接近轴极限。
Video:如何创建机器人目标:https://www.youtube.com/watch?v=ylKTq03-b_A&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=5
Tip:一般来说,程序的第一个机器人目标的各轴数值应尽可能居中(如下图中所示,轴数值的滑杆应尽量居中)。通过改变机器人的位姿,可以防止机器人在运行程序中的线性运动时达到轴极限。
6.选择程序➔
本范例中,第一个目标的机器人轴坐标值为:[-150, -75, -90, -60, 70, 110](角度)。用户可以使用相应的按钮拷贝这些角度值、粘贴
Note:选择另一个参考坐标系将导致新的机器人目标添加于该坐标中。
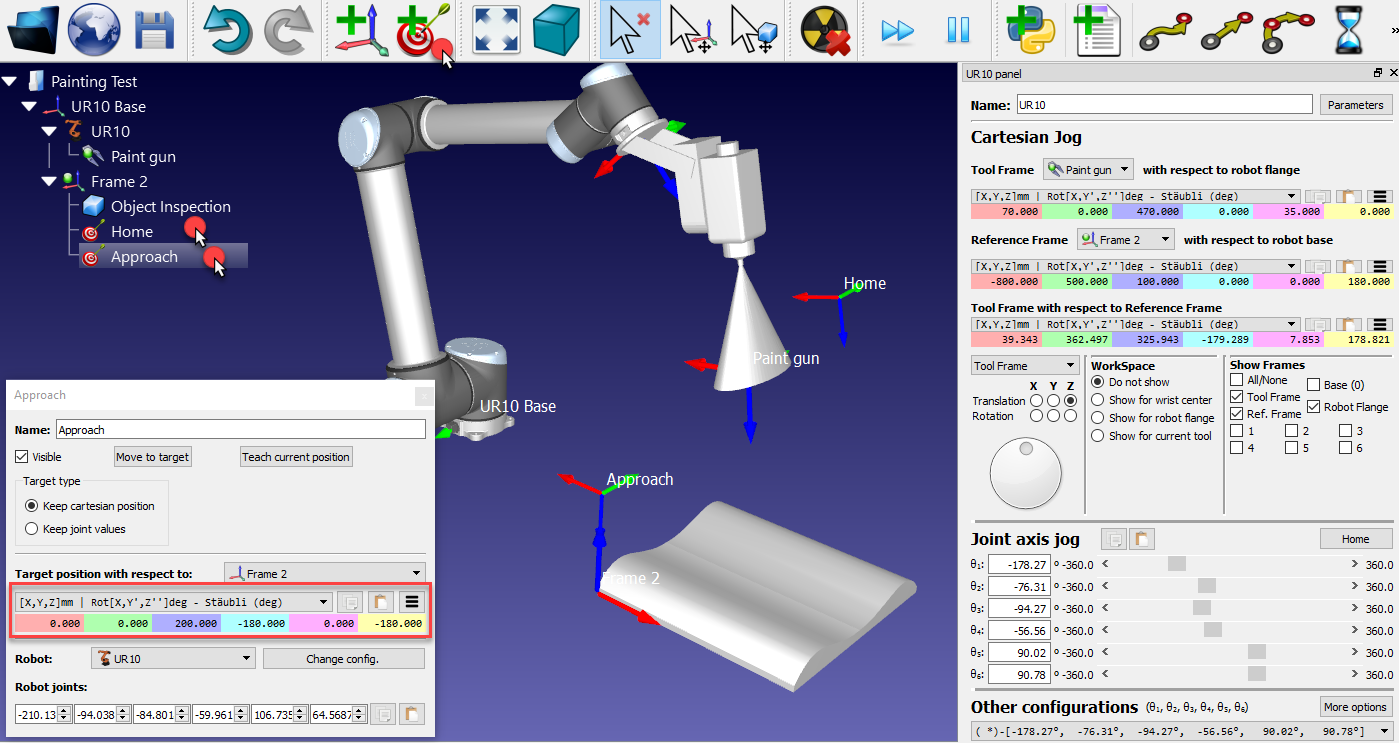
7.使用F2键将第一个机器人目标重命名为Home。或者,选择工具➔重命名。
8.移动机器人使其接近物体的一边(可以按下Alt键并拖拽机器人工具、输入机器人工具坐标或者通过滑杆驱动机器人的各轴)。
在本范例中,我们使用机器人轴坐标为[0,0,200,180,0,180]角度。
9.选择程序➔
10.将该目标重命名为Approach(见步骤7)。
11.在树型结构中分别点击Home与Approach,观察机器人在两个目标之间运动。
12.如需在运动轨迹中增加新的目标,右键点击机器人目标并选择:示教当前的位置(Alt+双击),记录当前机器人位置为机器人目标。
13.右键点击机器人目标,并选择

如有需要,改变机器人目标的坐标数值。