生成机器人程序
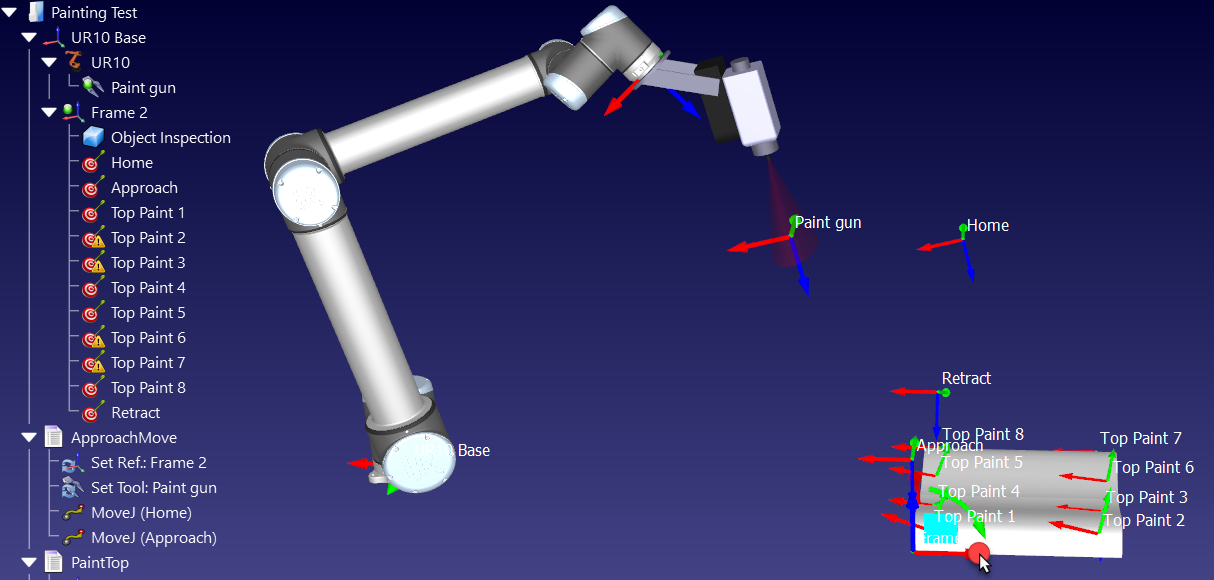
在RoboDK准备好仿真程序后,即可轻松生成机器人程序,而无需编写一行代码。
请按照以下步骤生成机器人程序:
1.右键单击一个仿真程序(例如MainProg)。也可以按住 Ctrl 键同时选择多个程序进行生成。
2.选择生成程序 (F6)。或者选择 "生成机器人程序为...",指定保存文件的位置。
然后,你就可以在文本编辑器中看到机器人程序。
有关如何生成机器人程序的更多信息,详见机器人程序章节。
在本例中,你将获得 UR 机器人的 SCRIPT 程序文件。对于优傲(Universal Robots)机器人,你可以单独导出任何程序,也可以导出包括子程序在内的主程序。
你获得的文件是离线生成程序的结果。可将该文件发送至机器人控制器,以运行在 RoboDK 中模拟的相同动作。
Note:如果你使用的是UR机器人,可以更改后处理器,生成机器人控制器可读取的URP文件。请访问以下章节,了解有关SCRIPT程序和URP程序区别的更多信息:如何为优傲(Universal Robots)控制器生成和修改URP程序,以及使用优傲(Universal Robots)控制器启动SCRIPT程序。
Note:"在机器人上运行"选项需要机器人驱动器才能正常工作。这些驱动器可能需要在机器人控制器上安装额外的软件选项和/或在机器人控制器上进行特定设置(UR 机器人不属于这种情况)。
Tip:使用RoboDK进行离线编程时,需要使用后处理器来定义用于生成每个程序的语法。RoboDK 提供多种后处理器,以支持多个机器人控制器和不同的制造应用。对于特定的机器人控制器,可能有不止一种后处理器可用。
可以为 UR 机器人更换后处理器,自定义程序的生成方式:
1.右键点击程序或机器人。
2.选择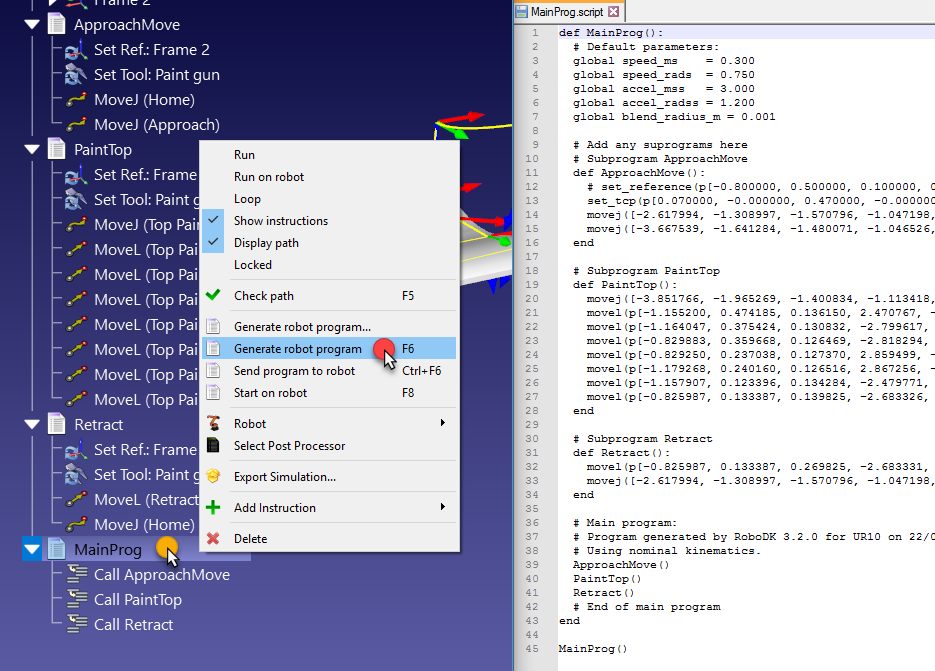
3.选择优傲(Universal Robots URP)。
Note:所有带有黑色图标的后处理器都可以通过选择程序➔ Add/Edit Post Processor(添加/编辑后处理器)进行修改。
再次生成程序。在本例中,默认后处理器使用关节值来定义每个线性移动,而第二个后处理器则使用直角坐标来定义每个线性移动。
Note:更多信息详见后处理器章节。