导入
RoboDK支持导入文件的常规3D格式包括STL,STEP(STP)和IGES(IGS)。其他格式例如WRML,3DS或者OBJ也同样支持(在Mac和Linux系统下则不支持STEP与IGES格式)。加载新的3D文件:
请按照以下步骤加载新的 3D 文件:
1.选择文件➔
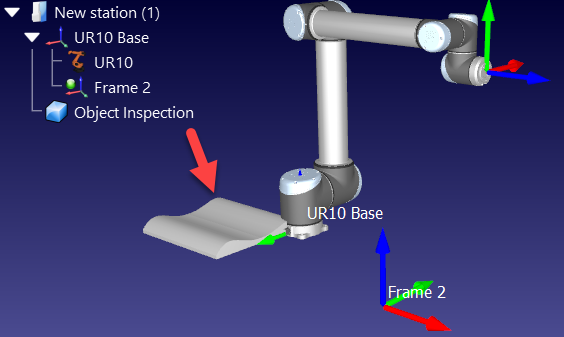
2.选择RoboDK 本地资源库中的Object Inspection:
C:/RoboDK/Library/Object Inspection。
3.或者,将物体拖拽至RoboDK主窗口内自动加载。
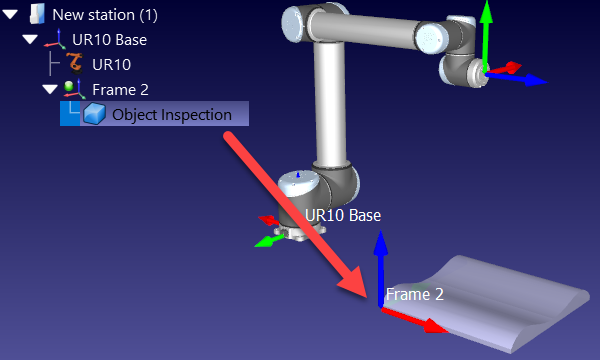
4.在工作站树型结构中,将物体拖拽至Frame 2内。
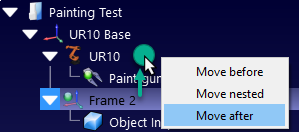
Tip:按住鼠标右键的同时进行拖拽,可以重新安排物体在树型结构中的位置。
Video:如何导入物体和创建工具:https://www.youtube.com/watch?v=gNgCwwpZrWE&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=4。
Important:将物体嵌套于参考坐标系内,可以确保机器人目标将相对于物体添加。如果需要移动参考坐标系时,机器人目标也随之移动。
Tip:当STEP或IGES文件过大时,可以通过以下操作加快导入的速度:
工具➔选项➔CAD➔快速导入设置。更多信息请参考STEP/IGES。
Tip:尽管用户可以改变物体相对于其参考坐标系的位置(双击一个物体并输入坐标值),我们建议始终保持物体与它的父级坐标系之间的关系,并通过移动坐标系来移动物体。这样能确保物体位置的准确性。这样只需更新机器人控制器与参考系之间的对应关系,就能正确匹配对象参考。