选择机器人
可以从本地文件或者在线模型库中添加新的机器人:
添加步骤:
1.点击文件➔
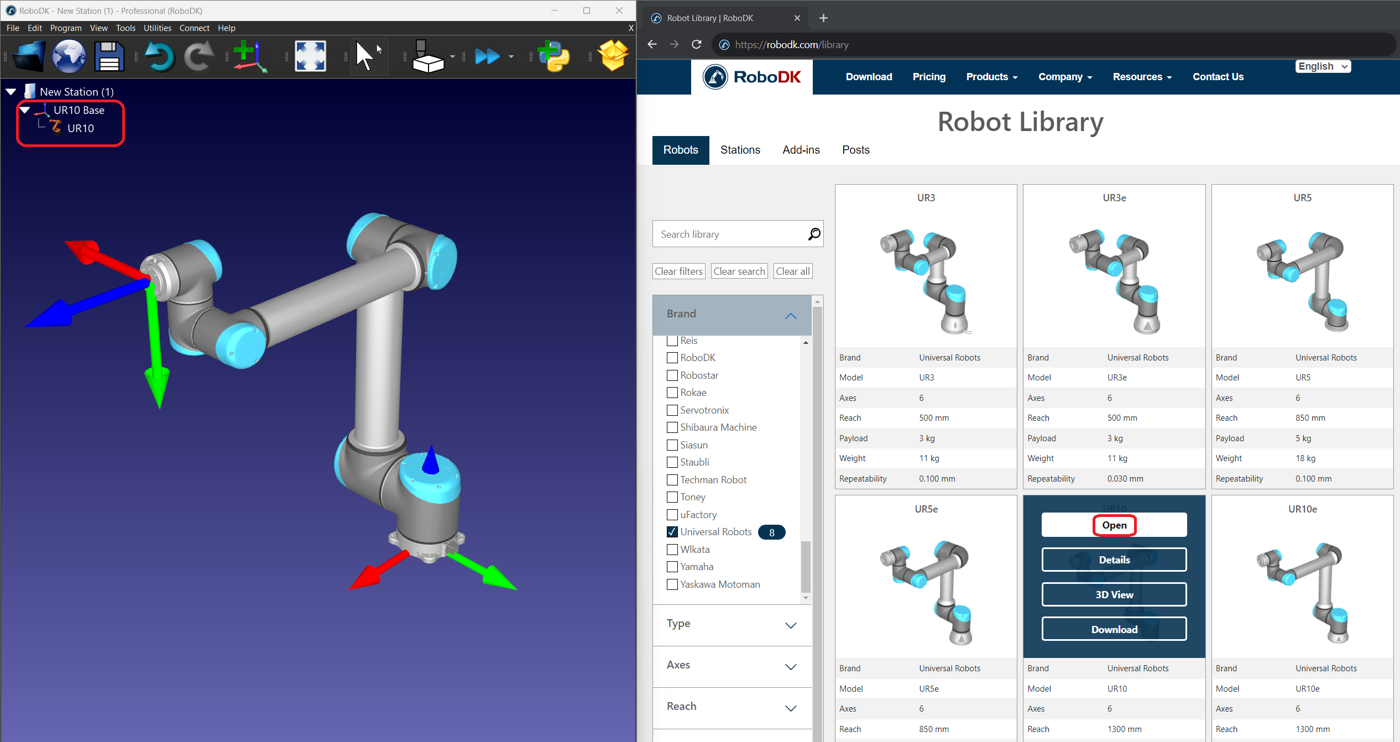
1.根据品牌、载荷等参数找到你的机器人模型。此案例我们将使用优傲(Universal Robots)UR10 机器人(10公斤载荷,1.3米臂展半径)。
2.在机器人文件处点击"打开",文件将会在 RoboDK 中打开,或是将文件拖放到窗口中。
3.完成机器人加载后可以关闭在线模型库。
Tip:点击在线模型库中的"清空选项"或"全部清空"将移除使用过的所有筛选条件。更多信息详见此章节RoboDK 资源库。
Tip:你也可以在网站上直接下载机器人文件(.robot):https://robodk.com.cn/cn/library,拖拽该文件至RoboDK窗口内,或者通过点击菜单打开它:文件➔ 打开。
Note:每次在RoboDK中加载新机器人时,系统会自动添加一个代表机器人基坐标系(Base Frame)的新参考坐标系。
Note:在线模型库中加载的机器人将自动备份于本地文件夹中。
本范例的默认位置为:C:/RoboDK/Library/Tutorial-UR-Painting.rdk。