添加参考坐标系
参考坐标系(又称坐标系)用于确定物体相对于机器人或其他3D空间对象的位置和方向。
Note:更多关于RoboDK中参考坐标系的内容详见参考坐标系。
添加一个新的参考坐标系:
1.选择程序➔
或者,点击工具栏中添加参考坐标系图标。
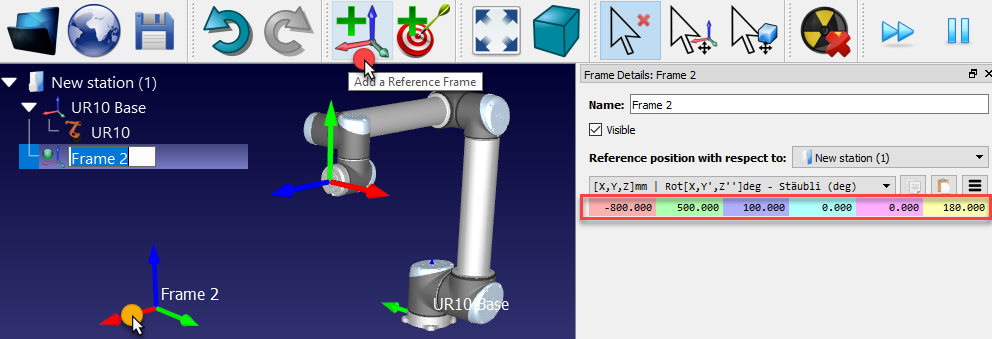
2.设置坐标系参数:双击树型结构中的参考坐标系(或主界面的3D模型),输入如图所示的坐标值(X、Y、Z位置+欧拉角方向)。快速调整:鼠标滚轮可在输入框上滚动,实时更新坐标系位置
默认颜色标识:
●X轴➔红色
●Y轴➔绿色
●Z轴➔蓝色
●第一欧拉角➔青色
●第二欧拉角➔洋红
●第三欧拉角➔黄色
Tip:选择工具➔选项➔显示➔显示 XYZ 轴字母,显示参考坐标系的字母标Note。
3.点击查看➔ 放大参考系 (+) 来增大参考坐标系。
4.点击查看➔ 缩小参考系 (-) 来减小参考坐标系的大小。
5.点击查看➔ 显示/隐藏文本 (/),以显示或隐藏屏幕上的文本。
6.也可以选择F2 重新命名树中的任何参考坐标系或物体。
Video:如何添加参考坐标系https://www.youtube.com/watch?v=ilmJSD-a9bs&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=5。
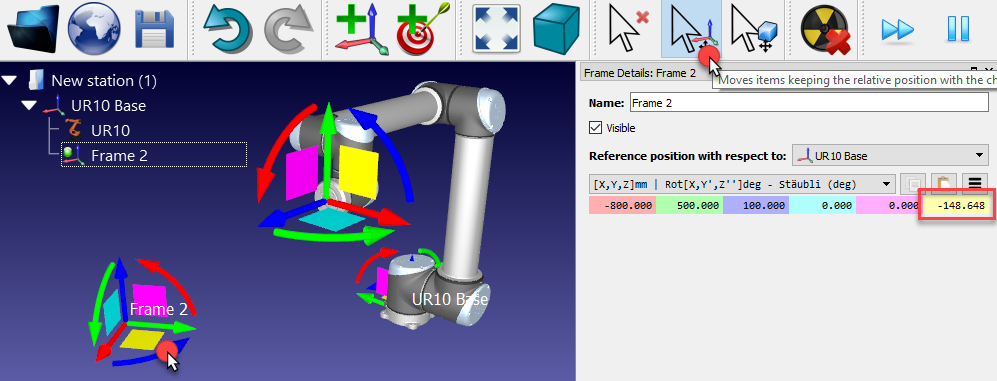
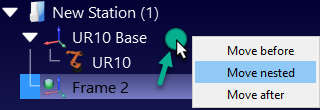
如果使用多个参考坐标系,用户可以根据它们现实中的相关性,在树型工作站中拖拽它们的位置。例如,参考坐标系Frame 2可以依据机器人基坐标位置摆放,此时如果移动UR10机器人的基坐标,Frame 2也会随之移动。当使用多台机器人以及参考坐标时,要Note意各坐标系之间的依附关系。下图中显示了不同的依附关系。
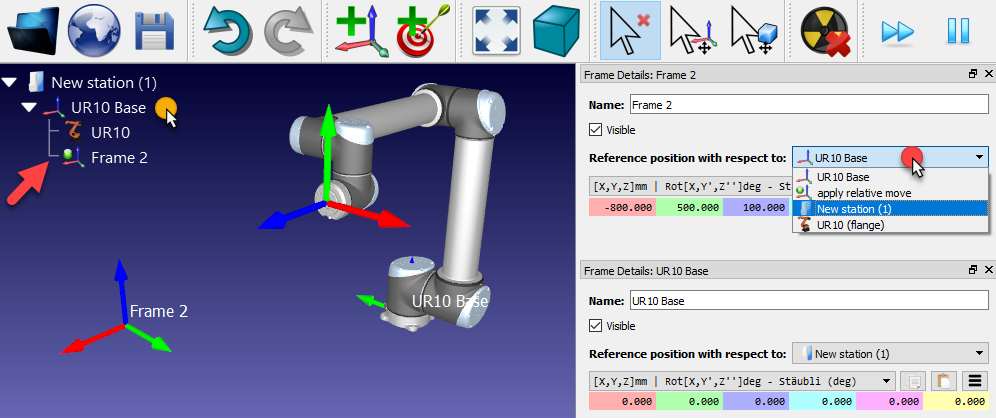
如下图所示,用户可以在不同颜色的方格中输入或者查看坐标值,这些数值代表该坐标系相对于其他坐标系的关系。多数机器人控制器根据机器人基坐标作为绝对参考来定义其他参考坐标系。
在工作空间内按下Alt键,或者通过使用工具栏中相应的按钮