创建
创建一个Approach机器人程序的操作步骤:
1.在菜单中选择:程序➔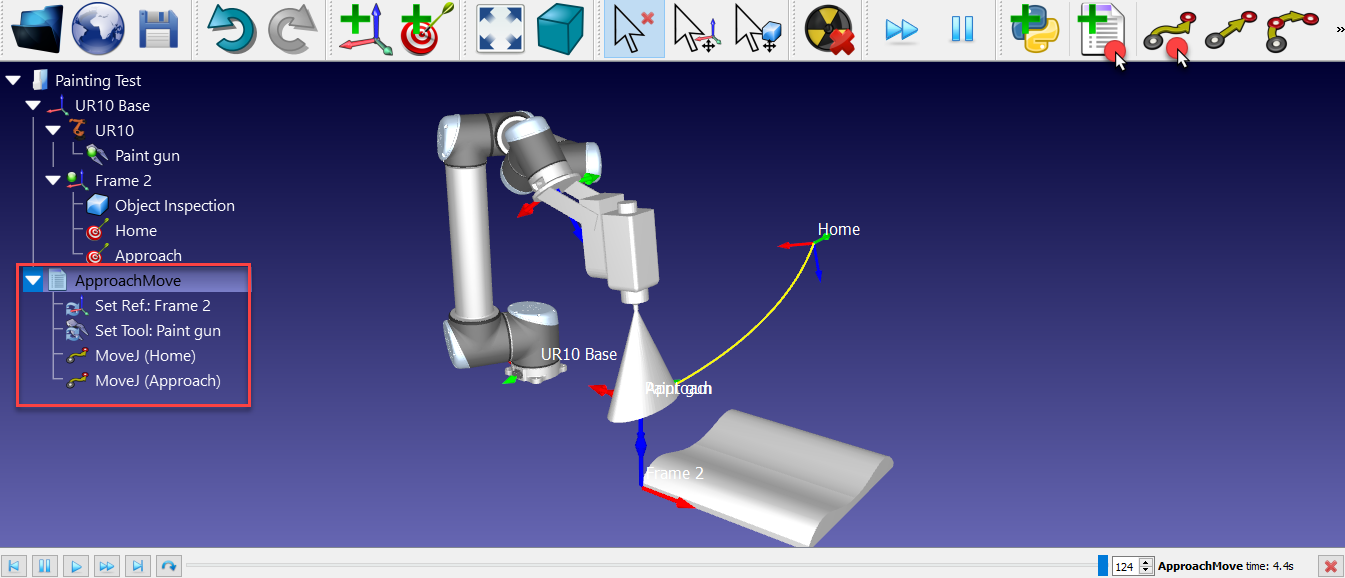
2.程序命名为:ApproachMove
3.选择目标点:Home
4.在菜单栏中选择:程序➔
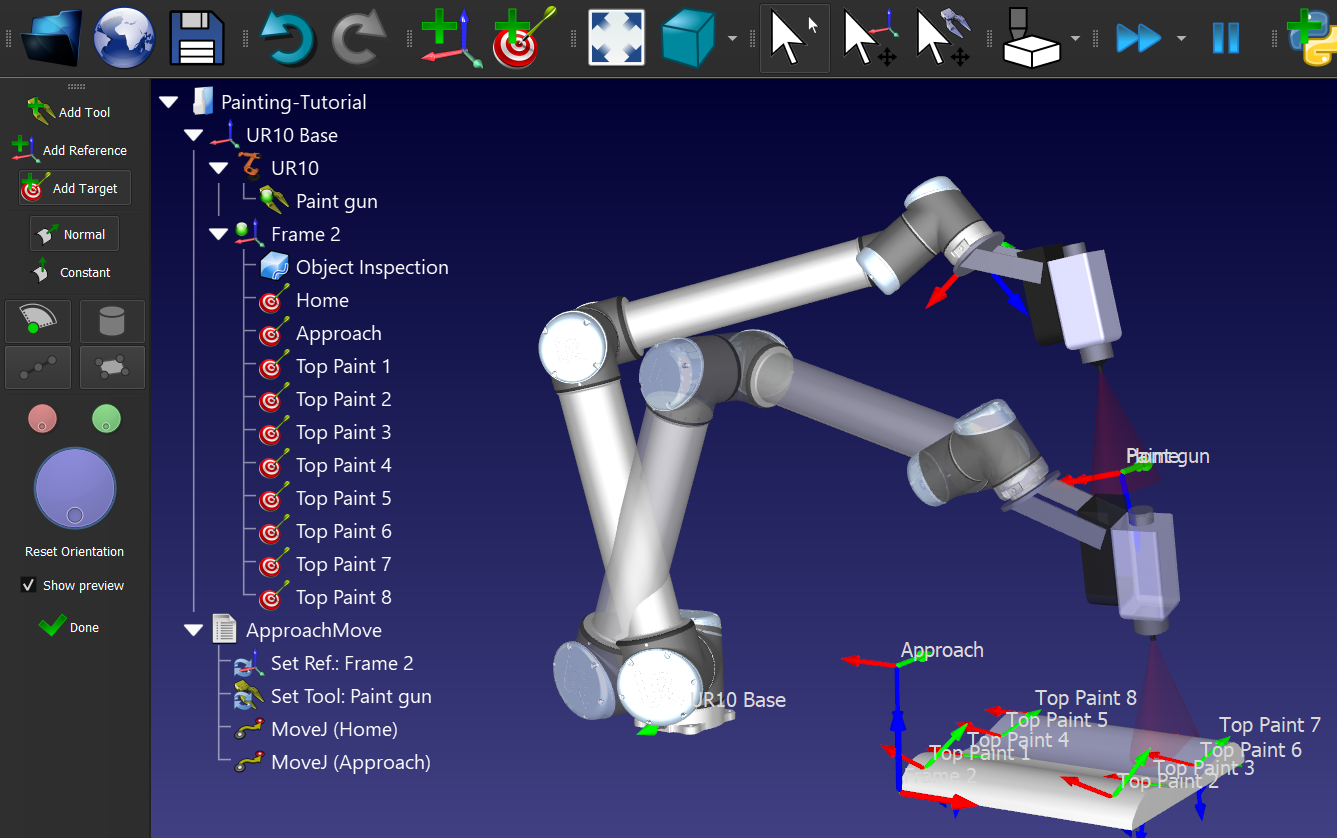
该程序自动生成两条命令,设置机器人工具与参考坐标系
Note: 如果没有选中任何机器人目标,将添加当前机器人位置为一个新的目标。
5.选择目标点:Approach
6.再次选择程序➔
双击ApproachMove程序就开始仿真了。主窗口下方自动显示仿真状态栏与预测周期时间。
创建一个Approach机器人程序的操作步骤:
1.在菜单中选择:程序➔
2.程序命名为:ApproachMove
3.选择目标点:Home
4.在菜单栏中选择:程序➔
该程序自动生成两条命令,设置机器人工具与参考坐标系
5.选择目标点:Approach
6.再次选择程序➔
双击ApproachMove程序就开始仿真了。主窗口下方自动显示仿真状态栏与预测周期时间。