创建
创建Retract回退程序,使机器人从工件位置撤离至安全区域。
操作步骤:
1.定位机器人至最后目标点:在机器人控制面板中,通过调整TCP相对于参考坐标系的Z坐标值(如下图高亮部分所示),将机器人垂直上移。
2.选择程序➔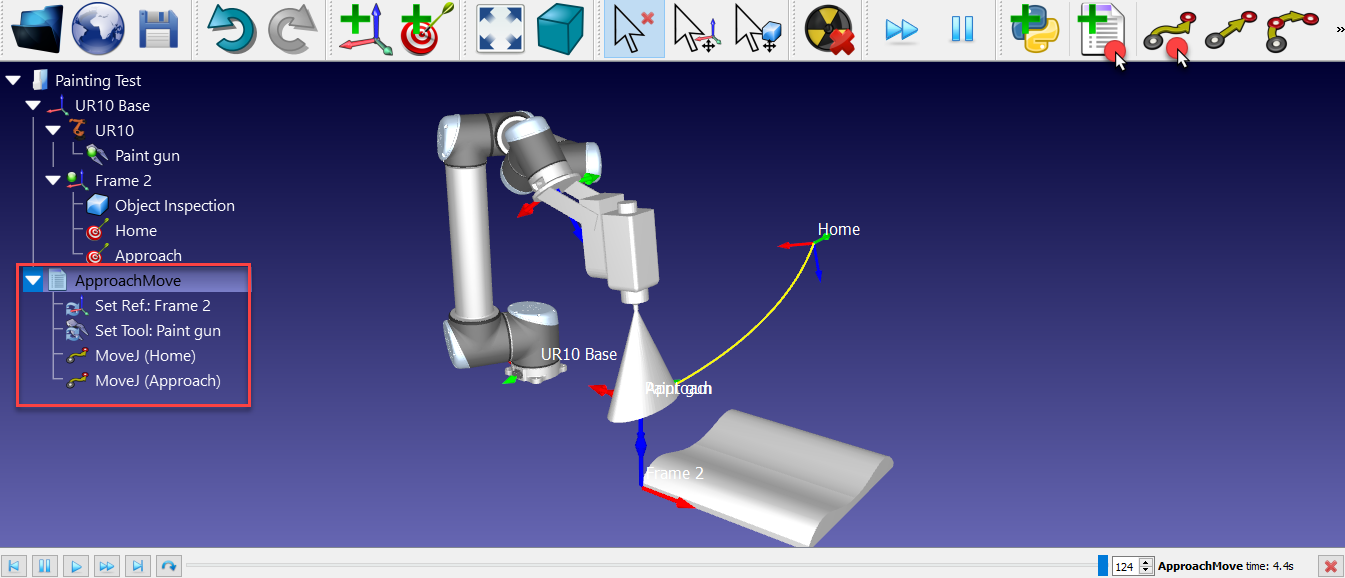
3.选择程序➔
4.选择Home目标点。
5.选择程序➔
双击单个程序可独立仿真。按住 空格键或点击 快速仿真按钮

创建Retract回退程序,使机器人从工件位置撤离至安全区域。
操作步骤:
1.定位机器人至最后目标点:在机器人控制面板中,通过调整TCP相对于参考坐标系的Z坐标值(如下图高亮部分所示),将机器人垂直上移。
2.选择程序➔
3.选择程序➔
4.选择Home目标点。
5.选择程序➔
双击单个程序可独立仿真。按住 空格键或点击 快速仿真按钮