移动工具几何位置
当工具加载到RoboDK中时,工具的几何位置可能无法相对于机器人法兰(工具的参照位置)正确对齐。
以下步骤假设已出现错误,且工具绕 Z 轴旋转了 180 度,因此应进行如下校正:
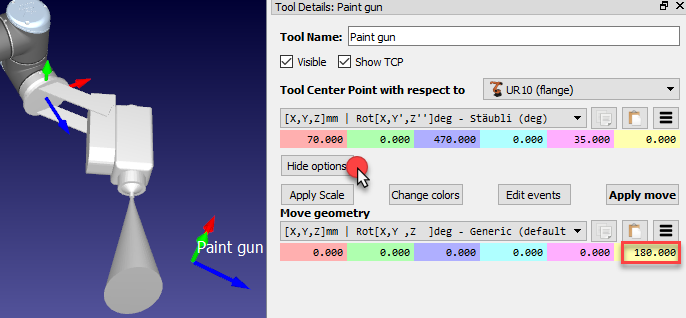
1.打开工具详情窗口,然后点击该窗口底部的更多选项。
2.在黄色方格(围绕Z轴旋转)中输入180,以改变喷枪的几何位置,如下图所示。可以通过鼠标滚轮更新各个方格中的坐标数字并在窗口中观察工具位置的改变。
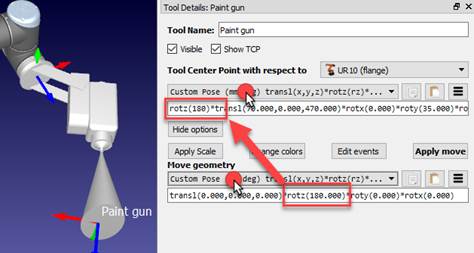
Tip:如果在此操作前已经定义了TCP位置,那么这样修改后的TCP将不再与工具实际几何位置相同。若要将 TCP 位置更新至正确位置,我们可以按照本节开头所述步骤操作(按住 Alt 键或手动输入数值)。或者,我们可以通过选择下拉选项中的Script (mm,deg) transl(x,y,z)*rotz(rz)*,以机器人法兰为参照旋转TCP(如下图所示):在TCP定义公式的开头添加Z轴旋转公式。
Note:更多关于如何使用几何转换与姿态的信息请参考参考坐标系章节。