表面上创建目标点
RoboDK的示教表面目标点功能适用于喷涂、检测等应用场景:
操作步骤:
1.在主菜单栏选择:程序➔
2.将鼠标悬停在工件表面,可预览机器人到达该位置时的姿态。
3.在物体表面点击多个点(左键单击),每个点击都会创建一个新目标点,并保持TCP的Z轴垂直于表面。
4.如需调整Z轴方向角度:使用左侧面板的滚轮、或按键盘左右方向键按下Alt键移动已有的目标。
5.功能键操作:按住Alt键可移动现有目标点,按住Alt+Shift键可在保持目标点在曲面的前提下移动。
6.退出创建模式:按Esc键。或右键点击屏幕选择【完成】。
创建目标点后,按以下步骤生成程序:
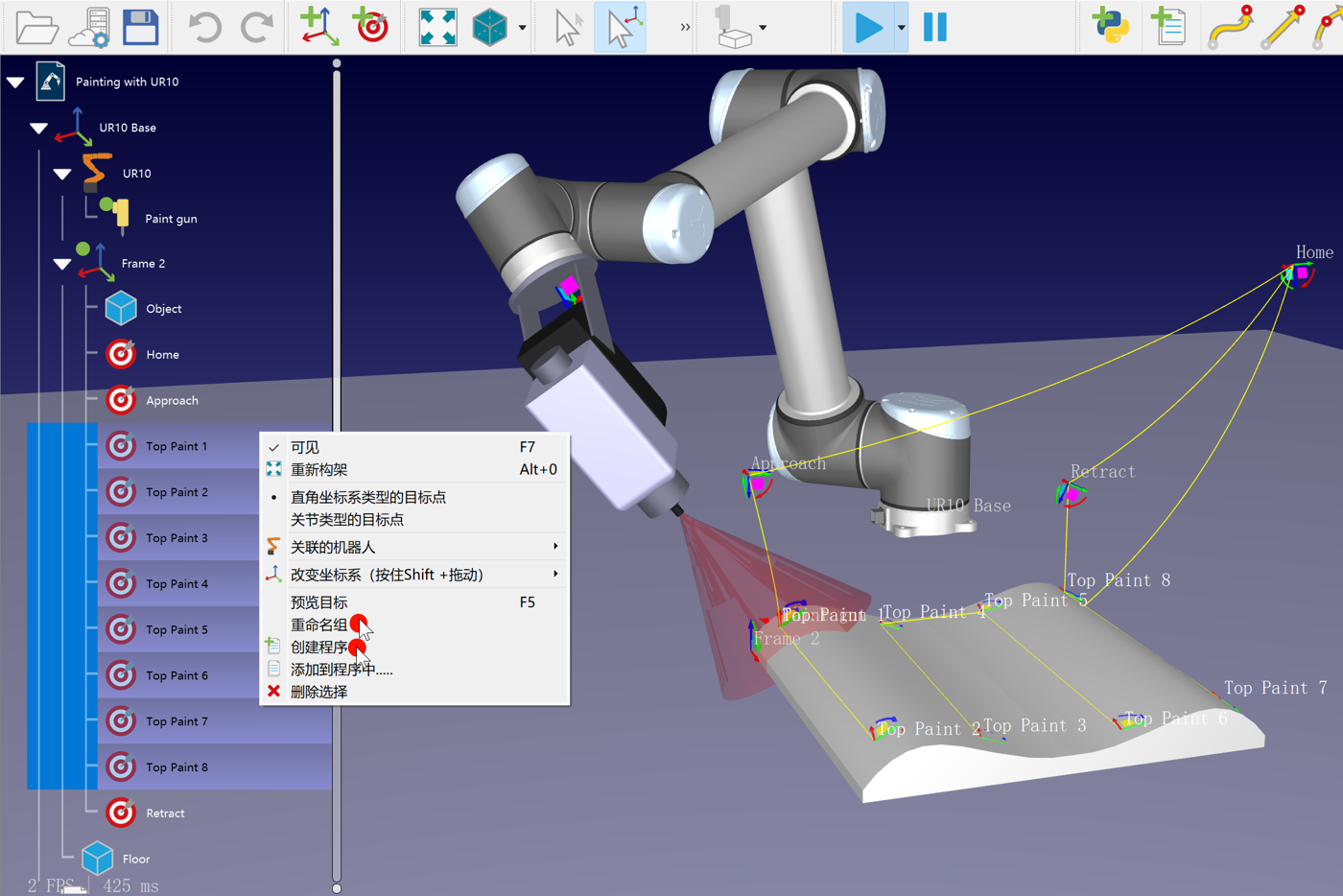
1.选择所有已创建的表面目标点(右键点击)。
Tip:按住Ctrl键可多选。或者先选Target 3,按下Shift键,再选择Target 10,这样鼠标就能选中Target 3至Target 10间所有目标。
2.点击弹出菜单中:重命名。
3.输入:Top Paint,所有选中目标点将按此名称自动编号。
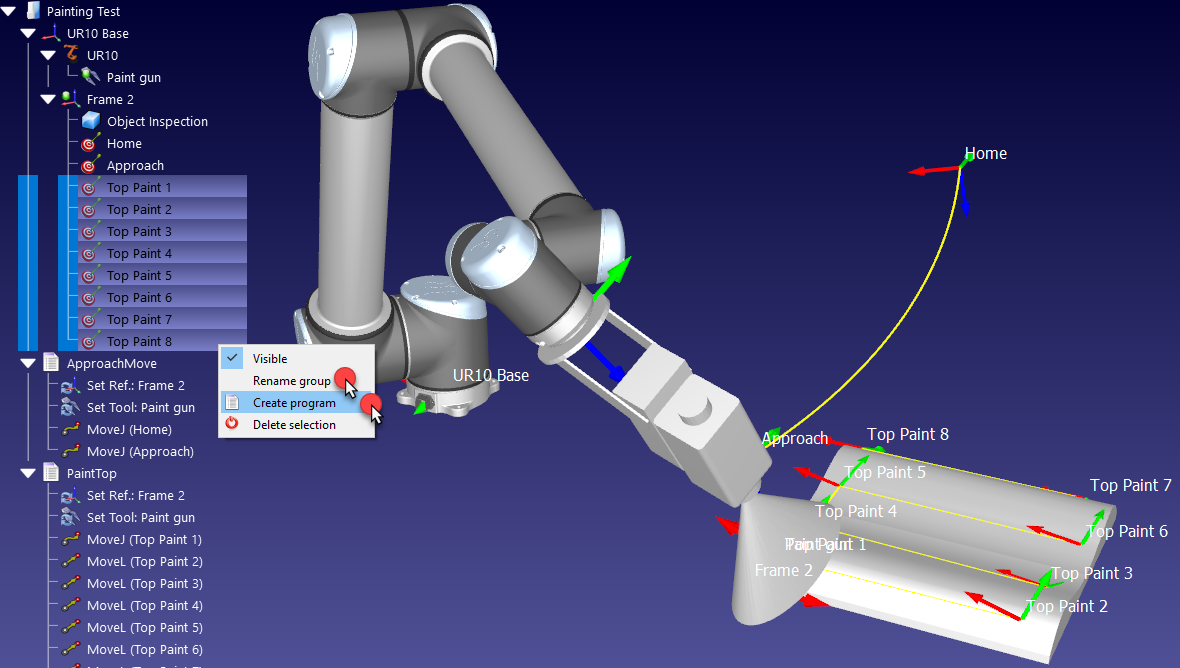
4.再次右键点击目标点,选择创建程序。首段运动指令为关节运动,后续的运动指令都为直线运动。
5.程序命名:PaintTop。
6.双击PaintTop程序,可查看沿目标点的运动仿真。
7.如需调整运动顺序,可直接拖拽程序内的运动指令。