主菜单分为以下几个部分:
1.文件:加载新的文件(3D物体,机器人,机器人工具,工具路径…),打开或者保存RoboDK项目文件(RDK后缀文件)。
2.编辑:剪切/复制/粘贴一个或者一组物体,以及撤销/重做动作。
3.程序:新建或者修改机器人仿真程序,以及其他有关离线编程的选项。
4.查看:在3D空间中巡航,并选择视图角度。
5.工具:工具菜单包括检测碰撞,几何点测量,以及“选项”菜单。
6.实用程序:实用程序菜单包括机器人加工设置,TCP或参考坐标系校准,机器人3D打印,机器人校准... 这些操作可能需要额外的软件许可。
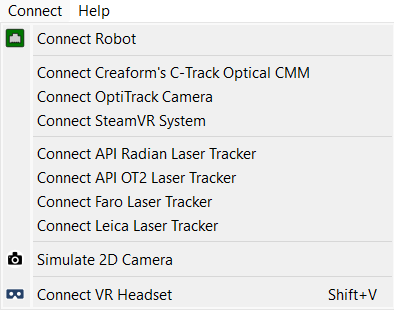
7.连接:连接至一台机器人,测量设备或者相机仿真。
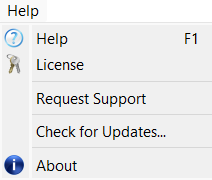
8.帮助:打开在线帮助文件(F1),查看版本更新以及设置软件许可。
RoboDK的文件菜单允许您打开和保存RoboDK项目。您还可以加载RoboDK支持的任何类型的文件,或使用不同格式或方法导出项目。
 新建工作站将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
新建工作站将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
Tip: 可以同时打开多个工作站。双击树型结构中的工作站图标激活并显示该工作站内容。
 打开加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
打开加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
 打开机器人库在窗口中显示在线机器人模型库。
打开机器人库在窗口中显示在线机器人模型库。
 保存工作站保存 RDK 文件。选择
保存工作站保存 RDK 文件。选择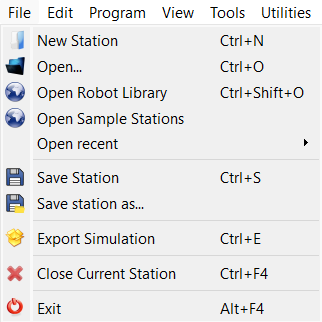 工作站另存为...输入文件保存的位置。
工作站另存为...输入文件保存的位置。
 导出模拟可将仿真程序导出为可共享的RoboDK for Web链接、3D PDF、3D HTML文件。本示例显示了3D HTML仿真的导出。
导出模拟可将仿真程序导出为可共享的RoboDK for Web链接、3D PDF、3D HTML文件。本示例显示了3D HTML仿真的导出。
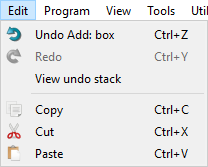
撤销(Ctrl+Z)和重做(Ctrl+Y)在Edit菜单内。可以在撤销堆栈内前进或者后退,选择回到某一状态。
可以在工作站树型结构中 剪切(Ctrl+X),
剪切(Ctrl+X), 复制(Ctrl+C)或者
复制(Ctrl+C)或者 粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。
粘贴(Ctrl+V)一个或一组项目。如果拷贝一个父级项目,它下面的子级项目也将被拷贝。

Tip: 可以合并类似的操作。例如,手动移动机器人时,每一小步都会被记录(默认设置)。合并这些步骤:选择工具➔选项➔选中类似操作分组。

程序菜单包括了关于离线编程以及生成程序需要的所有项目。可以给机器人添加新的仿真程序,参考坐标系,机器人目标或者机器人工具。这些离线编程项目(参考坐标,目标,工具,等等)出现在离线生成的程序中。
 添加参考坐标系为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
添加参考坐标系为工作站添加参考坐标系,或者,如果已选中了一个参考坐标系,新的坐标系将依附于已有坐标系。
 添加工具(TCP) 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
添加工具(TCP) 为机器人添加新的工具(TCP)。此时不需要工具几何信息。可以使用同一几何物体的不同部分定义多个工具。
 示教目标点(Ctrl+T)为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在机器人面板中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
示教目标点(Ctrl+T)为当前参考坐标系添加一个新的机器人目标(使用当前工具)。可以在机器人面板中选择当前参考坐标系与当前机器人工具。也可以通过右键单击,将项目设置为当前坐标系或者当前工具。
 示教表面的目标点(Ctrl+Shift+T)在物体表面点选机器人目标。本节提供了一个示例。
示教表面的目标点(Ctrl+Shift+T)在物体表面点选机器人目标。本节提供了一个示例。
 添加程序 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
添加程序 使用RoboDK的图形用户界面(GUI)添加新的机器人仿真程序。利用图形界面生成或者修改程序,无需编程水平。经过仿真后可以自动生成与机器人品牌相匹配的程序。
帮助文件的程序说明部分提供了使用GUI执行机器人程序指令的更多信息。
 添加Python程序 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
添加Python程序 在工作站内新建一个与RoboDK应用编程接口(API)相关联的Python程序/宏/脚本文件/模块。Python程序可以通过RoboDK API使用通用编程语言(Python)新建机器人仿真程序。可以为相应的机器人控制器定制程序。Python可以延申RoboDK的GUI并仿真特定的任务。这些任务可以是离线编程的子程序,在线编程,或者仿真某个事件,例如在取放任务仿真时在随机位置自动生成物体作为拾取目标。Python程序是在工作站中嵌入的文本文件,通过Python代码使RoboDK的某些任务自动化。在默认设置下,RoboDK的API是通过Python实现的,但是也可以使用其他编程语言的RoboDK接口。
Note: 使用GUI生成的普通机器人仿真程序(添加程序)与Python机器人程序(添加Python程序)的区别在于,使用GUI生成的程序无需代码编程。而Python宏通过RoboDK API扩展了GUI程序的限制。
最后,可以 添加或编辑后处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。
添加或编辑后处理器。后置处理器负责定义机器人程序的语义,使其与相应的机器人控制器匹配,可支持多个品牌的机器人编程语言。后处理是离线编程的最后一步。

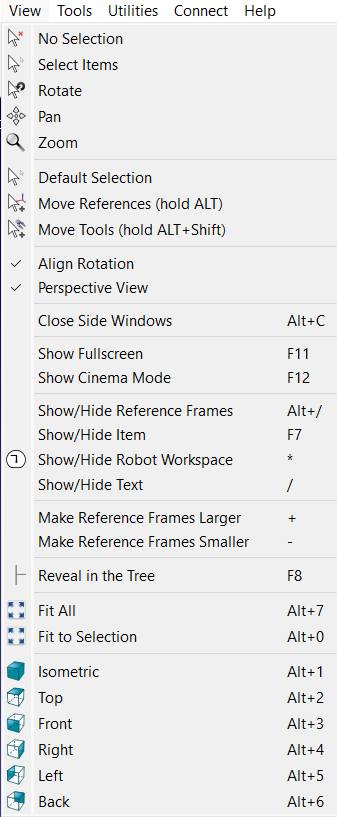
在视图菜单中包括3D空间巡航所需要的选项。在该菜单中,可以旋转,平移或缩放视图(或者在3D视图内使用右键菜单)。便于通过笔记本电脑的触摸板进行3D视图(代替鼠标)。
需要根据任意方向自由旋转,则取消选择:查看➔对齐姿态。否则,默认状态下RoboDK将XY平面锁定为水平面。
可以通过星号键(*)显示或者隐藏机器人的有效工作空间。还可以使用F7键查看被隐藏的物体。
Tip:使用加号+与减号-键改变工作站内坐标轴的大小。如果3D视图内有多个物体,通过调整参考坐标轴的大小可以方便用户更准确地拖拽并移动某物体(按下ALT键并拖动)。

在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动 Trace 将显示机器人的运动轨迹。
Trace 将显示机器人的运动轨迹。
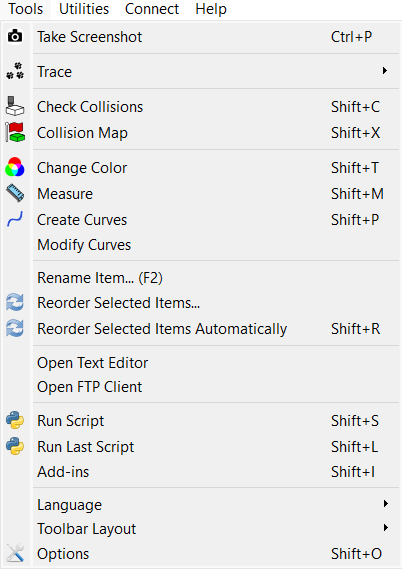 检查碰撞将启动碰撞检测,此时处在碰撞状态的物体会变成红色。
检查碰撞将启动碰撞检测,此时处在碰撞状态的物体会变成红色。 通过碰撞地图 设置物体之间的碰撞检测关系。
通过碰撞地图 设置物体之间的碰撞检测关系。
Note: 更多关于碰撞检测的信息在
检查碰撞部分。
 改变颜色 可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
改变颜色 可以在弹出窗内改变机器人或者物体的颜色。还可以反转物体表面垂直向量的方向。
 测量 可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
测量 可以根据一个参考坐标系或者工作站参考坐标系(绝对原点)测量3D几何点在空间内的坐标值。
可以通过选择工具➔ 语言设置RoboDK界面的语言,改变将即时生效。
工具栏布局 设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择 选项打开选项菜单。更多信息在选项菜单部分。
选项打开选项菜单。更多信息在选项菜单部分。
通过实用程序菜单,可以执行特定任务来设置机器人和执行特定制造操作,如机器人加工、钻孔或 3D 打印。
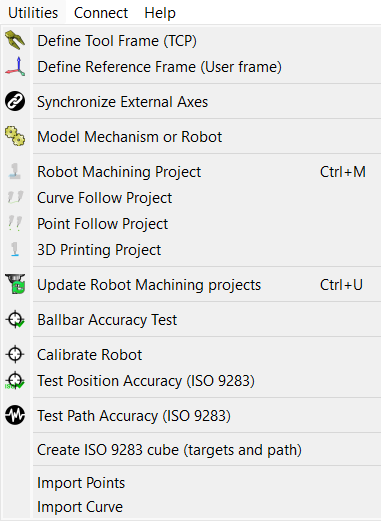 校准工具坐标系 (TCP) 通过提供真实工作环境中的数据,校准机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点校准TCP。使用的点越多,校准结果的准确性越高。更多有关机器人工具校准的内容:定义工具TCP。
校准工具坐标系 (TCP) 通过提供真实工作环境中的数据,校准机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点校准TCP。使用的点越多,校准结果的准确性越高。更多有关机器人工具校准的内容:定义工具TCP。
 校准参考坐标系根据真实机器人基坐标,校准一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系校准的内容:定义参考坐标系。
校准参考坐标系根据真实机器人基坐标,校准一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系校准的内容:定义参考坐标系。
 同步外轴为机器人设置一个或多个外部轴机械结构。更多信息请参考外轴。
同步外轴为机器人设置一个或多个外部轴机械结构。更多信息请参考外轴。
 机器加工项目 将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考数控机床CNC部分。
机器加工项目 将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考数控机床CNC部分。
 曲线跟踪项目 与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用导入曲线从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考曲线跟踪项目部分。
曲线跟踪项目 与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用导入曲线从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考曲线跟踪项目部分。
 点跟踪项目与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用导入点从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考点跟踪项目部分。
点跟踪项目与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用导入点从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考点跟踪项目部分。
 使用3D打印项目 为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考3D打印项目部分。
使用3D打印项目 为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考3D打印项目部分。
通过球杆仪精度测试,可以使用伸缩式双球杆仪检查机器人的性能。有关机器人球杆仪测试的更多信息,请访问:https://robodk.com.cn/cn/ballbar-test。
 校准机器人 新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com.cn/cn/robot-calibration。
校准机器人 新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com.cn/cn/robot-calibration。
Note: 以上工具可能需要离线编程功能之外的其他软件许可。

与机器人建立连接。通过输入连接参数,例如机器人IP地址、FTP用户名与密码,建立RoboDK与机器人之间的连接。可以通过FTP连接传输机器人程序,或者在PC电脑上与RoboDK支持的机器人控制器直接连接并运行机器人程序(通过RoboDK机器人驱动器)。用户也可以开发自己的机器人控制器,更多信息详见机器人驱动器章节。
RoboDK还可以连接支持的测量系统,例如激光追踪仪或者Creaform Optical CMM,连接这些设备可以实现机器人校准与性能测试的全自动化。
在帮助菜单中选择帮助 ,可在线打开此文档。此外,可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
,可在线打开此文档。此外,可以在RoboDK中按F1键,将自动显示与当前选中项目有关的帮助内容。
选择检查更新…查看软件版本是否需要更新。弹出窗会提示安装新的版本或者当前版本无需更新。如果没有信息弹出,说明RoboDK与因特网的连接或被防火墙阻止。