RoboDK的文件菜单允许您打开和保存RoboDK项目。您还可以加载RoboDK支持的任何类型的文件,或使用不同格式或方法导出项目。
 新建工作站将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
新建工作站将在树型结构中添加新的工作站。可以通过RDK文件加载或者保存工作站。RDK文件(RDK后缀)包括工作站内机器人以及物体等的所有信息,所以不需要单独备份工作站内的任何项目。
Tip: 可以同时打开多个工作站。双击树型结构中的工作站图标激活并显示该工作站内容。
 打开加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
打开加载一个RoboDK文件(RDK工作站)或者加载任何支持的文件格式,例如机器人文件.robot,物体数模文件STEP/IGES/STL,机器人工具文件.tool等等。
 打开机器人库在窗口中显示在线机器人模型库。
打开机器人库在窗口中显示在线机器人模型库。
 保存工作站保存 RDK 文件。选择
保存工作站保存 RDK 文件。选择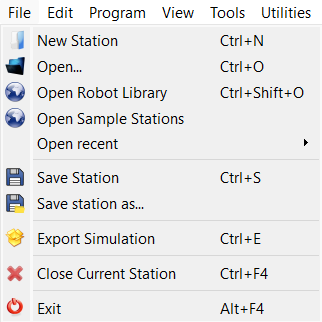 工作站另存为...输入文件保存的位置。
工作站另存为...输入文件保存的位置。
 导出模拟可将仿真程序导出为可共享的RoboDK for Web链接、3D PDF、3D HTML文件。本示例显示了3D HTML仿真的导出。
导出模拟可将仿真程序导出为可共享的RoboDK for Web链接、3D PDF、3D HTML文件。本示例显示了3D HTML仿真的导出。