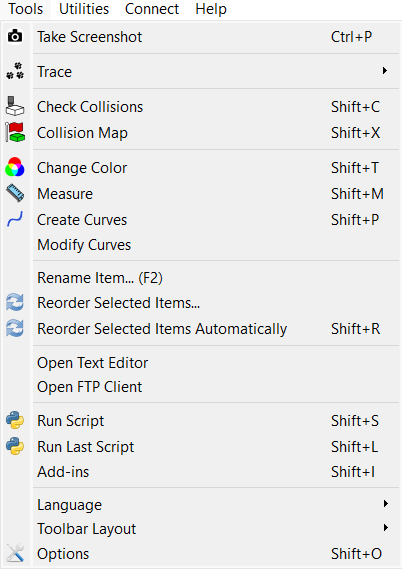
工具菜单
在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动

Note: 更多关于碰撞检测的信息在检查碰撞部分。

可以通过选择工具➔ 语言设置RoboDK界面的语言,改变将即时生效。
工具栏布局 设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择
在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动
可以通过选择工具➔ 语言设置RoboDK界面的语言,改变将即时生效。
工具栏布局 设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择