通过实用程序菜单,可以执行特定任务来设置机器人和执行特定制造操作,如机器人加工、钻孔或 3D 打印。
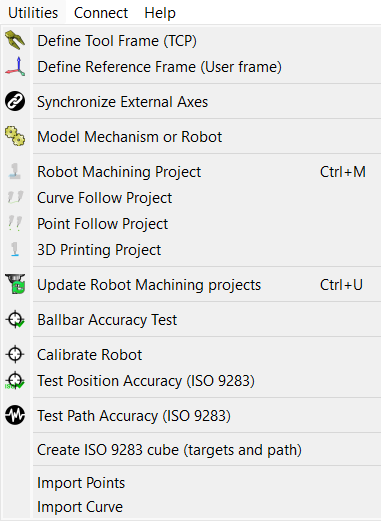 校准工具坐标系 (TCP) 通过提供真实工作环境中的数据,校准机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点校准TCP。使用的点越多,校准结果的准确性越高。更多有关机器人工具校准的内容:定义工具TCP。
校准工具坐标系 (TCP) 通过提供真实工作环境中的数据,校准机器人工具(TCP)。例如使用TCP从不同方向接近并触碰同一几何点的机器人关节轴角度值。多数机器人示教器都支持这一功能。RoboDK允许用户使用无限多的点校准TCP。使用的点越多,校准结果的准确性越高。更多有关机器人工具校准的内容:定义工具TCP。
 校准参考坐标系根据真实机器人基坐标,校准一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系校准的内容:定义参考坐标系。
校准参考坐标系根据真实机器人基坐标,校准一个参考坐标系。此操作将虚拟环境中的坐标与真实物体相匹配。更多有关参考坐标系校准的内容:定义参考坐标系。
 同步外轴为机器人设置一个或多个外部轴机械结构。更多信息请参考外轴。
同步外轴为机器人设置一个或多个外部轴机械结构。更多信息请参考外轴。
 机器加工项目 将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考数控机床CNC部分。
机器加工项目 将机器加工的刀具轨迹转化为机器人仿真程序。在机器加工领域,使用计算机辅助加工(CAM)软件为5轴数控机床(CNC)生成的程序,例如通用的G-Code或者APT文件,都可以导入RoboDK中。RoboDK可以将此类程序/刀具轨迹转化为机器人程序并仿真。更多信息请参考数控机床CNC部分。
 曲线跟踪项目 与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用导入曲线从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考曲线跟踪项目部分。
曲线跟踪项目 与机器人加工项目相似,并可以从3D几何物体中提取曲线信息并转化为机器人路径。还可以使用导入曲线从CSV或者TXT文件中导入3D曲线。这些曲线的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考曲线跟踪项目部分。
 点跟踪项目与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用导入点从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考点跟踪项目部分。
点跟踪项目与机器人加工项目相似,并可以从3D几何物体中提取点位置信息并转化为机器人路径。还可以使用导入点从CSV或者TXT文件中导入3D点信息。这些点的格式为一系列XYZ点(如有需要,还包括IJK向量)。更多信息请参考点跟踪项目部分。
 使用3D打印项目 为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考3D打印项目部分。
使用3D打印项目 为物体生成机器人3D打印程序。该物体需要已经存在于RoboDK工作站中。RoboDK通过切片软件(Slicer)将3D打印路径转化为G-Code程序,即等同于3轴机器人加工刀具路径。更多信息请参考3D打印项目部分。
通过球杆仪精度测试,可以使用伸缩式双球杆仪检查机器人的性能。有关机器人球杆仪测试的更多信息,请访问:https://robodk.com.cn/cn/ballbar-test。
 校准机器人 新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com.cn/cn/robot-calibration。
校准机器人 新建机器人校准项目,可以找出机器人微误差参数并提高机器人准确性。经过校准后的机器人模型可用于任何RoboDK离线仿真项目中。通常情况下,机器人校准将提高机器人的准确性5倍或者更多,取决于机器人型号。机器人校准需要额外的测量设备来测量机器人位置。机器人的准确性与重复性可以通过ISO9283标准,在校准前、后分别测试并验证。更多关于机器人校准与性能测试的内容请参考:https://robodk.com.cn/cn/robot-calibration。
Note: 以上工具可能需要离线编程功能之外的其他软件许可。
