RoboDK 5.7 及更新版本受益于重新设计的图标,可通过激活工具➔选项➔一般➔ 使用现代图标。下表列出了主要图标及其新设计的概览。
Tip:选择工具➔选项➔一般➔显示工具栏文本,在工具栏中显示图标名称,这有助于可以帮助你过渡到较新的图标。
传统 | 现代 | |
| 
| 打开
加载一个新的文件(RoboDK工作站RDK文件)或者任何支持的文件类型(robot,tool,STEP,IGES,STL,…) |
| 
| 打开在线模型库
显示在线模型库(机器人,工具,物体) |

| 
| 保存工作站
保存RoboDK工作站为RDK文件 |
| 
| 撤销
撤销上一个指令(Ctrl+Z) |

| 
| 重做
重做上一个指令(Ctrl+Y) |
| 
| 添加参考坐标系
参考坐标系用于定位物体 |
| 
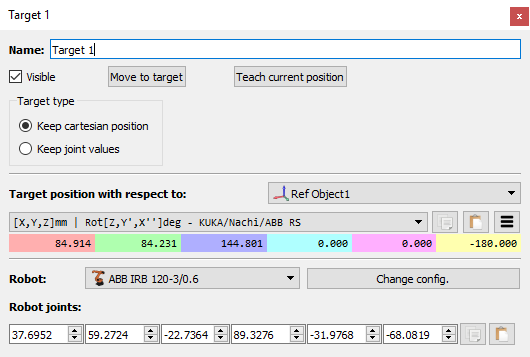
| 添加机器人目标
机器人目标记录机器人相对于参考坐标系的方位,也可以记录为关节坐标 |
| 
| Fit All全视图
显示工作空间内全部项目 |
| 
| 等距视图 显示工作空间等距视图 |

| 
| 移动坐标系
在屏幕上使用鼠标拖拽并移动坐标系(按住Alt键) |
| 
| 移动TCP(机器人工具中心点)
在屏幕上使用鼠标拖拽并移动机器人TCP(按住Alt+Shift) |
| 
| 碰撞检测
启用或禁用碰撞检测功能。更多关于碰撞检测的信息,请参阅碰撞检测部分。 |

| 
| 快速仿真
提高仿真速度(按住空格键) |

| 
| 暂停仿真
使用空格键暂停或者恢复仿真 |

| 
| 添加机器人仿真程序
为机器人添加一个仿真程序 |

| 
| 添加Python程序
添加一个新的Python脚本程序 |

| 
| 关节运动指令
添加一个新的关节运动指令 |

| 
| 线性运动指令
添加一个新的线性运动指令 |

| 
| 导出仿真文件
将仿真程序导出为3D PDF或者3D HTML文件(范例) |