机器人构型
机器人构型定义了机器人的特定状态。改变构型需要跨越奇异点,但在执行直线运动时,机器人控制器无法穿越奇异点(此时必须改用关节运动)。
换句话说,要在两个目标点之间完成直线运动,机器人必须在整个运动过程中(包括起点和终点)保持相同的构型。
右键点击机器人选择: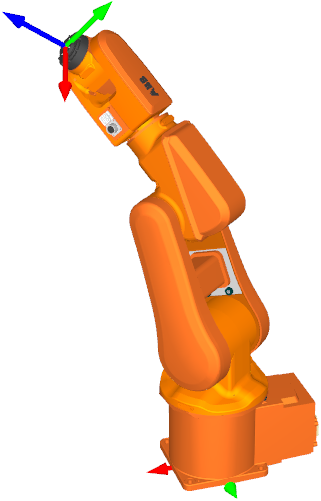
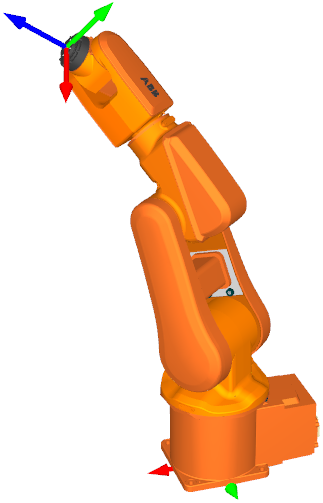
经典的6轴机器人在达到某一目标位置时,通常可以有8种不同的位姿(假设每个关节轴都可旋转一整圈)。事实上,不同的机器人有不同的轴极限设置。所以,当某一机器人达到某一目标位置时,可能会有1到100种不同的机器人位姿选择。
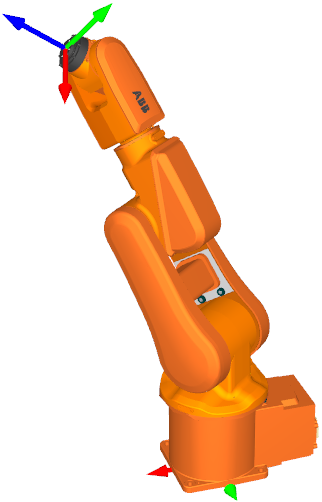
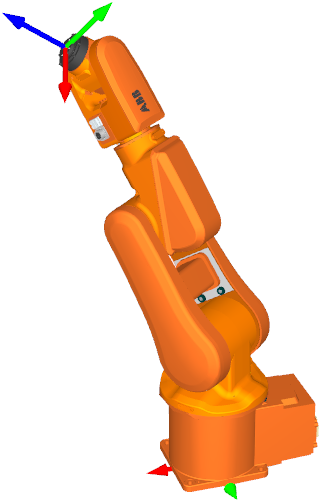
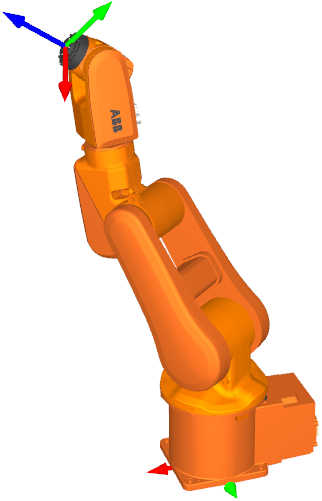
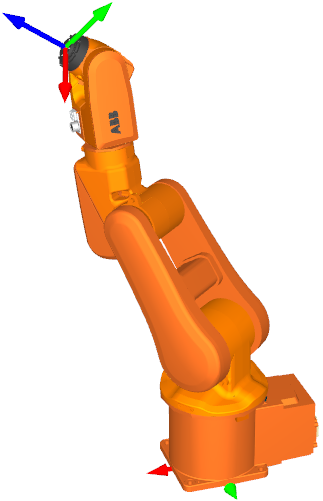
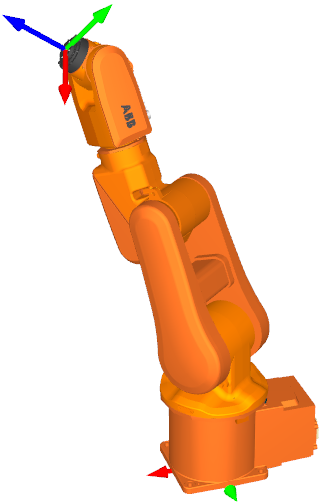
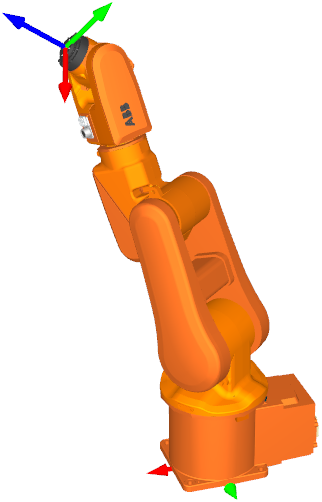

机器人构型定义了机器人到达某一位置的特定方式。例如:
- 肘部朝上或朝下(Up vs. Down,简称U/D);
- 正面朝向目标或基座旋转180°反向到达目标(Front vs. Rear,简称F/R);
- 关节5通过翻转(改变符号)同时由关节4和6补偿运动(Flip vs. Non-Flip,简称F/N)。
以上三种状态的组合(2×2×2)最终形成8种可能的构型。