机器人面板
在工作站树型结构(或者3D空间)内双击机器人以打开机器人控制面板。可以通过手动调节关节轴或直接输入各关节轴角度值来移动机器人位置。这里的角度值以及当前的机器人位置与机器人控制器的角度值相匹配。
双击角度值的上限或者下限数字可以修改机器人的轴极限值。在默认状态下,RoboDK使用机器人出厂设置的硬件极限值。某些应用可能需要对轴极限的进一步限制(软件极限)。关节轴数值可以通过使用相应的按钮:复制
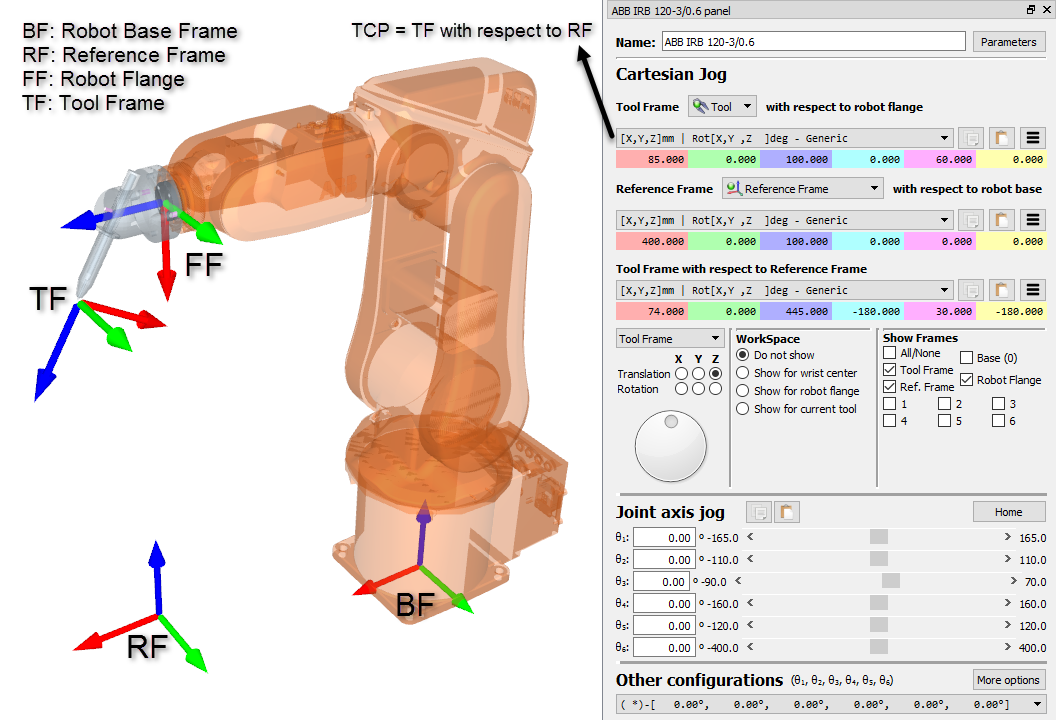

控制面板的手动调节坐标系部分显示了与机器人运动有关的信息:
o工具坐标系(TF)表示其相对于机器人法兰坐标系(FF)的位置关系。机器人法兰坐标系(FF)始终固定不变,但工具坐标系(TF)会随机器人末端安装的工具不同而变化。在大多数机器人控制器中,这种关系被称为 UTOOL(工具坐标系)、ToolData(工具数据)或简称 Tool(工具)。机器人工具坐标系的核心是 TCP(Tool Center Point,工具中心点),即工具的工作点(如焊枪的焊丝尖端、夹爪的抓取中心)。在机器人控制面板中,被选中的工具会成为 “当前激活”工具(Active Tool),用于新目标点和程序的基准参考。已激活的工具图标上会显示绿色标记
o参考坐标系(RF)表示其相对于机器人基坐标系(BF)的位置关系。机器人基坐标系(BF)始终固定不变,但可以通过不同的参考坐标系(RF)来定位同一基坐标系下的各类物体。在大多数机器人控制器中,这种关系也被称为 UFRAME(用户坐标系)、WorkObject MFRAME(工件坐标系) 或 Reference(参考坐标系)。在机器人控制面板中,被选中/双击的参考坐标系会成为 “当前激活”坐标系(Active Reference Frame),并用于新目标点和机器人程序的基准参考。已激活的参考坐标系图标上会显示绿色标记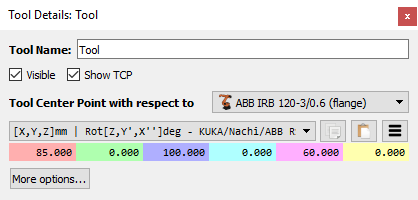
●工具坐标系(TF)相对于当前激活的参考坐标系(RF)的坐标值,表示机器人当前位置下 TCP(工具中心点)的空间位置。修改这些坐标值可直接驱动机器人移动,关节轴数据将自动重新计算。当创建新目标点时(通过程序→示教目标点功能),机器人会记录以下数据:笛卡尔坐标值(基于激活的参考坐标系)、关节轴角度值。该目标点将始终关联至当前激活的参考坐标系。
机器人面板"其他构型"下拉菜单中,提供了其他机器人“位姿”的选择列表。机器人位姿定义了机器人达到某一目标的位置状态。改变机器人位姿将“跨越”奇异状态。更多信息在机器人配置章节。
最后,机器人面板右上方的"参数"功能,可用于调整kinematic运动学参数、选择后处理器,或在机器人校准项目完成后提取精确参数。仅在特定情况下才需要修改这些值
Vedio:这个视频介绍了 RoboDK 机器人和机器人面板: https://www.youtube.com/watch?v=z357z1NlkZM&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=8