机器人工具
双击机器人工具
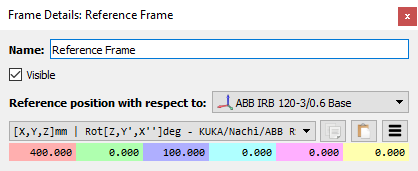
Note: 工具中心点的姿态也可以通过机器人面板修改。
选择 "更多选项...",可通过比例系数改变机器人工具的大小,或者基于机器人法兰改变机器人工具的几何位置。改变此菜单内的数值不会对机器人仿真程序产生影响,工具的几何信息是用于显示以及碰撞检测(保证实际工具不会受到碰撞)。
Tip:可以根据已有的TCP代替法兰作为参考位置、定义新的TCP。例如,可以使用一个轴承工具的TCP从Z轴延申一定的距离,来定义一个刀具工具TCP的位置。该范例提供更多的信息。
Vedio:这个视频介绍了机器人工具 (TCP): https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11