机器人目标
机器人目标的位置定义了机器人需移动到的位置。
按照以下步骤添加新的机器人目标并查看其信息:
●选择程序➔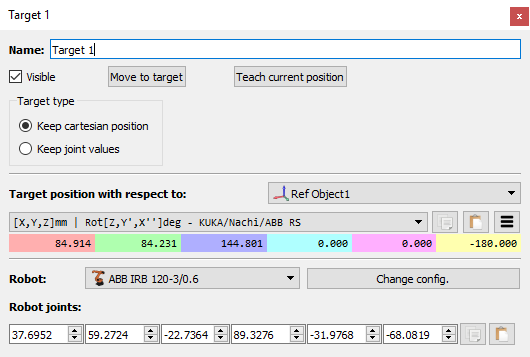
本操作根据当前参考坐标系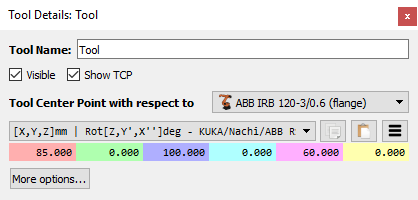
●右键单击一个机器人目标,选择更多选项… (F3)查看已记录的目标姿态(位置与方向)和机器人关节轴角度值。

创建新的机器人目标时将记录TCP相对于参考坐标系的笛卡尔坐标值,以及当前的机器人各轴坐标角度值。在默认状态下,RoboDK将机器人目校准义为保留直角坐标系位置
另外,也可以将机器人目校准义为保留关节变量值 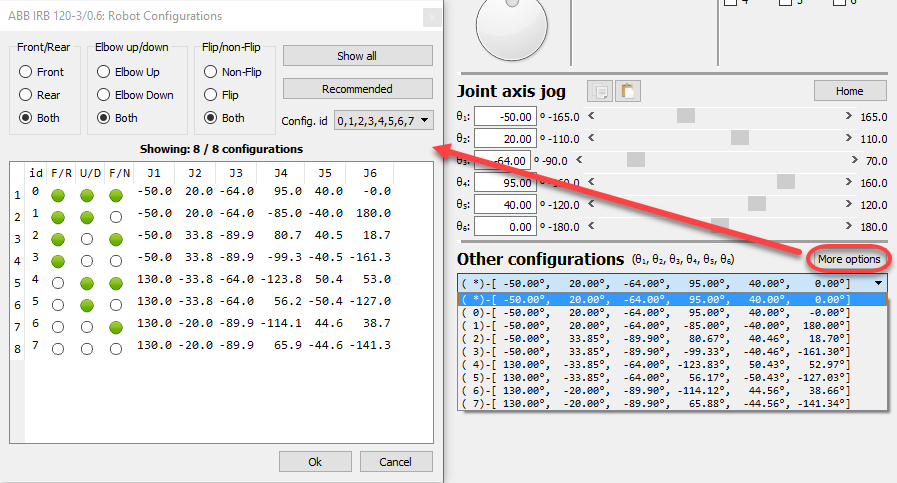
一个常用的操作是将一系列运动的第一个机器人目校准义为关节目标。例如,将工作范围附近的一个趋近位置定义为关节目标,之后的机器人目标都使用笛卡尔目标,以确保正确的机器人工具轨迹(修改参考坐标系或者机器人工具坐标系时,该轨迹不会改变)。
Tip: 选择 "移动到目标点 ",在工作站中或者3D视图中选择该目标,都是同一个操作。
可以查看机器人到达同一目标的其他位姿。更多信息在下一个章节。