界面
本部分描述RoboDK的主要界面,包括机器人控制面板和主菜单。RoboDK的主界面显示以下部分:
●主菜单位于软件窗口的顶端,软件所有的功能和选项都可以通过主菜单实现。
●工具栏包含了常用功能的图形快捷按钮。更多信息详见工具栏章节。
●左侧的树型结构显示了当前工作站中的所有项目。这些项目可以是机器人,机器人工具,物体,机器人目标或者用于机器人加工或者校准的特殊设置项目。树型结构显示了各项目之间的从属关系——并可以通过树型结构修改其关系。例如,一个机器人目标可以根据某个参考坐标系来定义(即:机器人目标依附于参考坐标系),而该参考坐标系可以根据机器人基坐标系来定义,机器人工具则一般来说“依附”于机器人。
●窗口底部的状态栏用于显示有用的操作、运行信息。
●软件窗口的核心区域显示3D虚拟工作环境,并根据树型工作站内的从属关系显示所有项目。
双击(在树型工作站中或者3D空间中)一个项目,该项目的属性窗口会弹出。例如,双击一个机器人,它的机器人控制面板会弹出。弹出窗口可以通过点击右上角的x关闭。
那么例外的是,双击目标点可使机器人移动至该目标位置。若仅对目标点进行单击选择(非双击),机器人将从当前位置模拟直线运动或关节运动轨迹至该目标点。

机器人面板
在工作站树型结构(或者3D空间)内双击机器人以打开机器人控制面板。可以通过手动调节关节轴或直接输入各关节轴角度值来移动机器人位置。这里的角度值以及当前的机器人位置与机器人控制器的角度值相匹配。
双击角度值的上限或者下限数字可以修改机器人的轴极限值。在默认状态下,RoboDK使用机器人出厂设置的硬件极限值。某些应用可能需要对轴极限的进一步限制(软件极限)。关节轴数值可以通过使用相应的按钮:复制
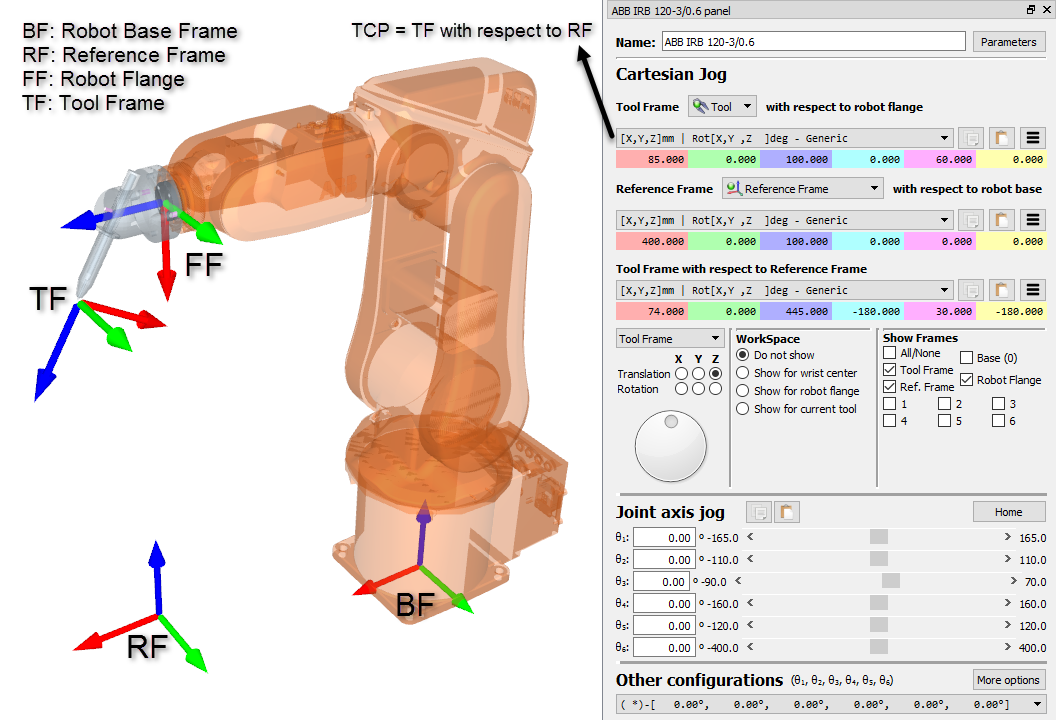

控制面板的手动调节坐标系部分显示了与机器人运动有关的信息:
o工具坐标系(TF)表示其相对于机器人法兰坐标系(FF)的位置关系。机器人法兰坐标系(FF)始终固定不变,但工具坐标系(TF)会随机器人末端安装的工具不同而变化。在大多数机器人控制器中,这种关系被称为 UTOOL(工具坐标系)、ToolData(工具数据)或简称 Tool(工具)。机器人工具坐标系的核心是 TCP(Tool Center Point,工具中心点),即工具的工作点(如焊枪的焊丝尖端、夹爪的抓取中心)。在机器人控制面板中,被选中的工具会成为 “当前激活”工具(Active Tool),用于新目标点和程序的基准参考。已激活的工具图标上会显示绿色标记
o参考坐标系(RF)表示其相对于机器人基坐标系(BF)的位置关系。机器人基坐标系(BF)始终固定不变,但可以通过不同的参考坐标系(RF)来定位同一基坐标系下的各类物体。在大多数机器人控制器中,这种关系也被称为 UFRAME(用户坐标系)、WorkObject MFRAME(工件坐标系) 或 Reference(参考坐标系)。在机器人控制面板中,被选中/双击的参考坐标系会成为 “当前激活”坐标系(Active Reference Frame),并用于新目标点和机器人程序的基准参考。已激活的参考坐标系图标上会显示绿色标记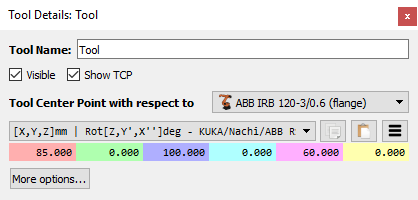
●工具坐标系(TF)相对于当前激活的参考坐标系(RF)的坐标值,表示机器人当前位置下 TCP(工具中心点)的空间位置。修改这些坐标值可直接驱动机器人移动,关节轴数据将自动重新计算。当创建新目标点时(通过程序→示教目标点功能),机器人会记录以下数据:笛卡尔坐标值(基于激活的参考坐标系)、关节轴角度值。该目标点将始终关联至当前激活的参考坐标系。
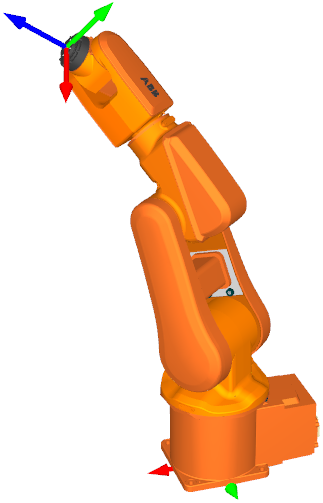
机器人面板"其他构型"下拉菜单中,提供了其他机器人“位姿”的选择列表。机器人位姿定义了机器人达到某一目标的位置状态。改变机器人位姿将“跨越”奇异状态。更多信息在机器人配置章节。
最后,机器人面板右上方的"参数"功能,可用于调整kinematic运动学参数、选择后处理器,或在机器人校准项目完成后提取精确参数。仅在特定情况下才需要修改这些值
Vedio:这个视频介绍了 RoboDK 机器人和机器人面板: https://www.youtube.com/watch?v=z357z1NlkZM&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=8
机器人工具 (TCP)
双击机器人工具
选择 "更多选项...",可通过比例系数改变机器人工具的大小,或者基于机器人法兰改变机器人工具的几何位置。改变此菜单内的数值不会对机器人仿真程序产生影响,工具的几何信息是用于显示以及碰撞检测(保证实际工具不会受到碰撞)。
Vedio:这个视频介绍了机器人工具 (TCP): https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11
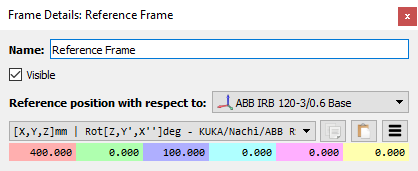
参考坐标系
双击一个参考坐标系
Note:你也可以在机器人面板修改参考坐标系。
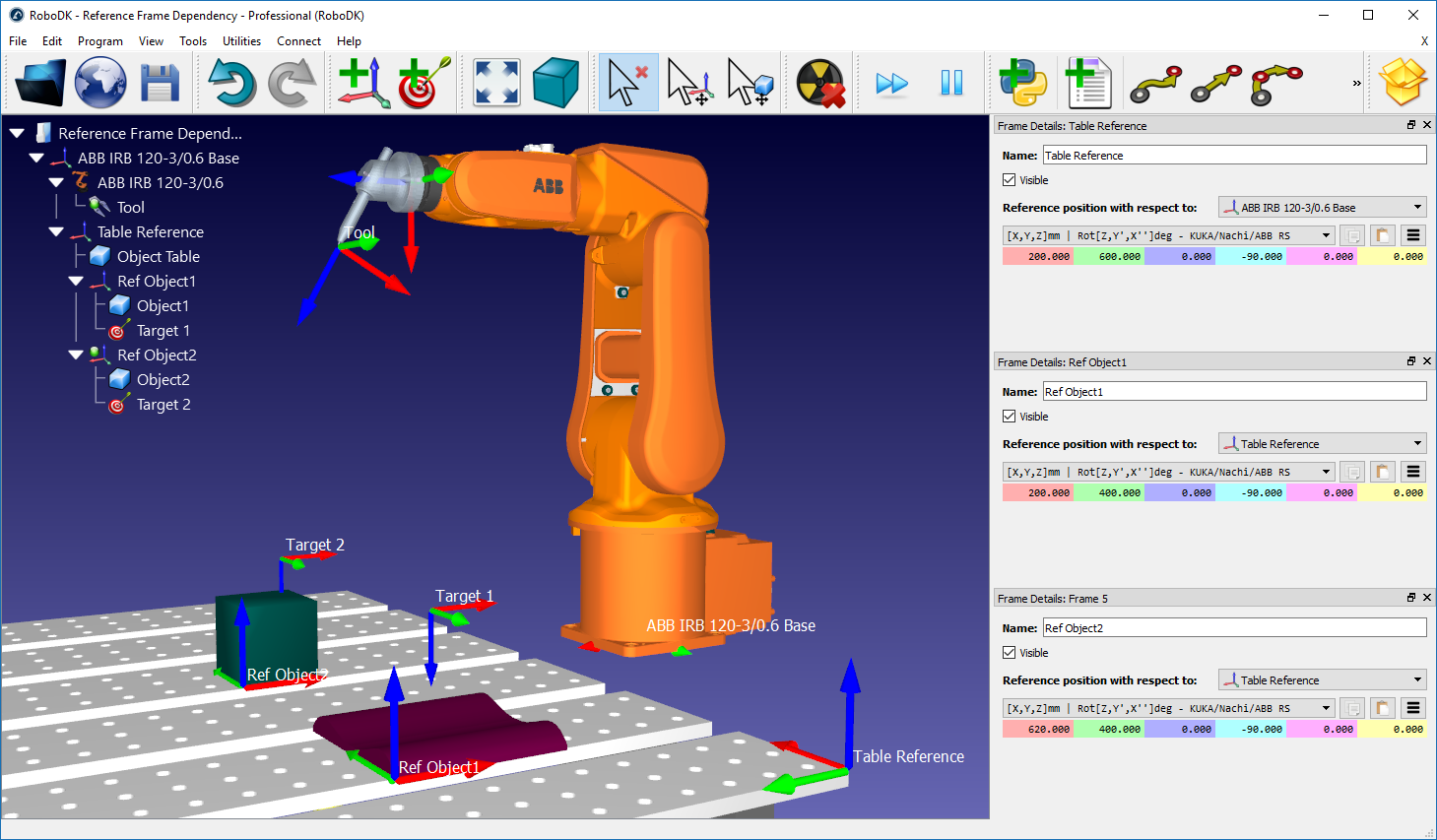
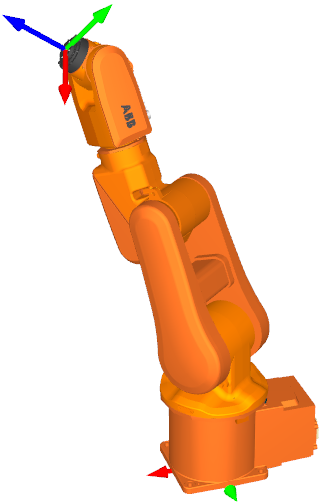
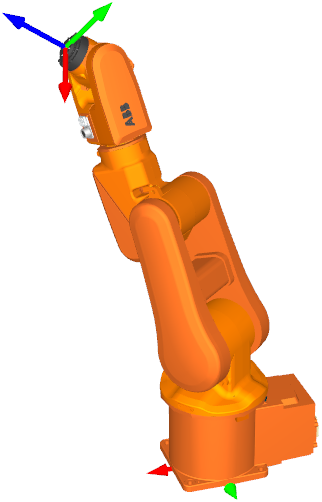
用户可以定义多个参考坐标系之间的关系。例如,一个工作台的位置可以相对于机器人基底位置来定义,在工作台上的物体可以相对于工作台位置定义。移动工作台的坐标不会更改物体与工作台之间的位置关系,但是会修改物体与机器人的位置关系。以上内容如图所示。

Vedio:更多有关参考坐标系,以及参考坐标系对于仿真和离线程序设计的重要性详见该视频:https://www.youtube.com/watch?v=GGc_bXPs2dk。
机器人目标
机器人目标的位置定义了机器人需移动到的位置。
按照以下步骤添加新的机器人目标并查看其信息:
●选择程序➔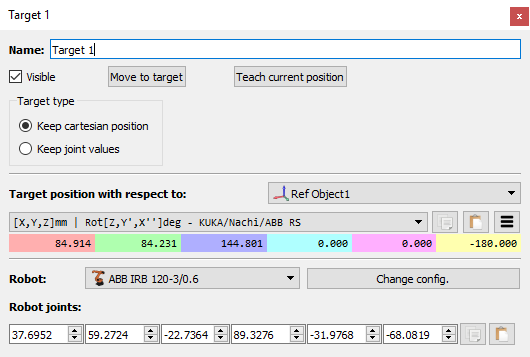
本操作根据当前参考坐标系
●右键单击一个机器人目标,选择更多选项… (F3)查看已记录的目标姿态(位置与方向)和机器人关节轴角度值。

创建新的机器人目标时将记录TCP相对于参考坐标系的笛卡尔坐标值,以及当前的机器人各轴坐标角度值。在默认状态下,RoboDK将机器人目校准义为保留直角坐标系位置
另外,也可以将机器人目校准义为保留关节变量值 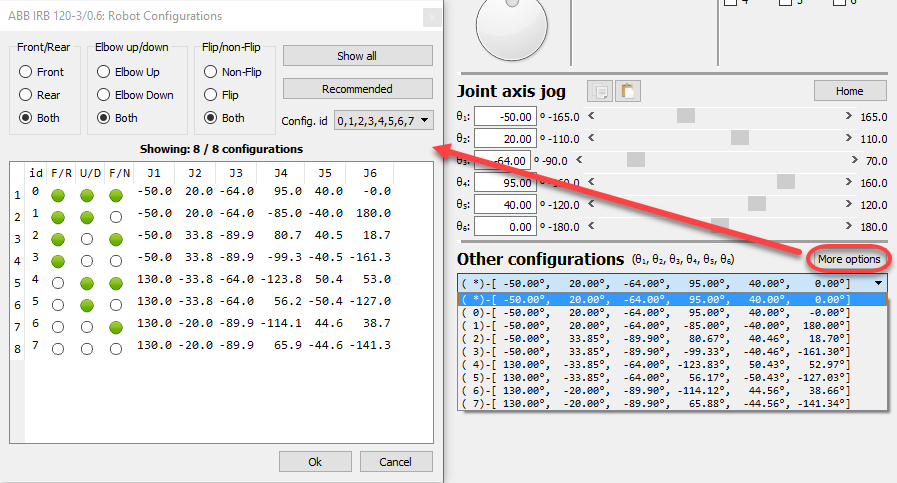
一个常用的操作是将一系列运动的第一个机器人目校准义为关节目标。例如,将工作范围附近的一个趋近位置定义为关节目标,之后的机器人目标都使用笛卡尔目标,以确保正确的机器人工具轨迹(修改参考坐标系或者机器人工具坐标系时,该轨迹不会改变)。
Tip: 选择 "移动到目标点 ",在工作站中或者3D视图中选择该目标,都是同一个操作。
可以查看机器人到达同一目标的其他位姿。更多信息在下一个章节。
机器人构型
机器人构型定义了机器人的特定状态。改变构型需要跨越奇异点,但在执行直线运动时,机器人控制器无法穿越奇异点(此时必须改用关节运动)。
换句话说,要在两个目标点之间完成直线运动,机器人必须在整个运动过程中(包括起点和终点)保持相同的构型。
右键点击机器人选择: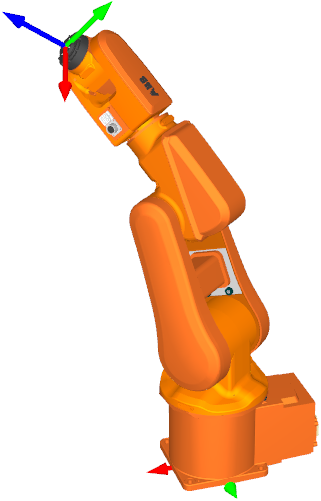
经典的6轴机器人在达到某一目标位置时,通常可以有8种不同的位姿(假设每个关节轴都可旋转一整圈)。事实上,不同的机器人有不同的轴极限设置。所以,当某一机器人达到某一目标位置时,可能会有1到100种不同的机器人位姿选择。

机器人构型定义了机器人到达某一位置的特定方式。例如:
- 肘部朝上或朝下(Up vs. Down,简称U/D);
- 正面朝向目标或基座旋转180°反向到达目标(Front vs. Rear,简称F/R);
- 关节5通过翻转(改变符号)同时由关节4和6补偿运动(Flip vs. Non-Flip,简称F/N)。
以上三种状态的组合(2×2×2)最终形成8种可能的构型。
物体设置
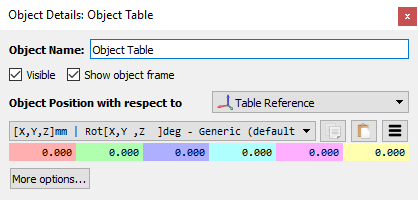
可以在RoboDK种导入物体的数字模型,例如STL,STEP或IGES等文件格式。在工作站树型结构或者3D视图中双击一个物体,可以打开它的设置窗口。

可以根据任何参考坐标系查看或者设置该物体的位置。但是,物体通常是根据某一参考坐标系定义的,所以,如果需要移动某物体,建议通过移动该物体的参考坐标来移动它。在RoboDK仿真中,物体还可以在“仿真事件”中由机器人工具抓取。
Tip: 若需将物体移动至特定位置,建议将其置于参考坐标系中,并通过移动参考坐标系实现定位。此方法可明确物体相对于机器人的位置,尤其适用于通过物体生成新机器人程序的场景(例如使用曲线跟随工具或表面示教目标工具)。在树形结构中,直接将物体拖放至参考坐标系即可建立该依赖关系。
更多选项可以改变物体的颜色、按比例缩放尺寸、或者根据自身的参考坐标移动它的几何位置。
主菜单
主菜单分为以下几个部分:
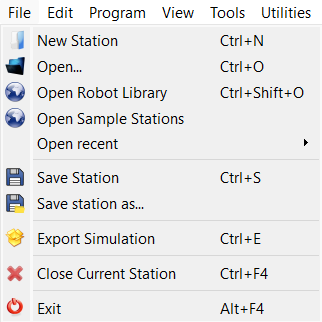
1.文件:加载新的文件(3D物体,机器人,机器人工具,工具路径…),打开或者保存RoboDK项目文件(RDK后缀文件)。
2.编辑:剪切/复制/粘贴一个或者一组物体,以及撤销/重做动作。
3.程序:新建或者修改机器人仿真程序,以及其他有关离线编程的选项。
4.查看:在3D空间中巡航,并选择视图角度。
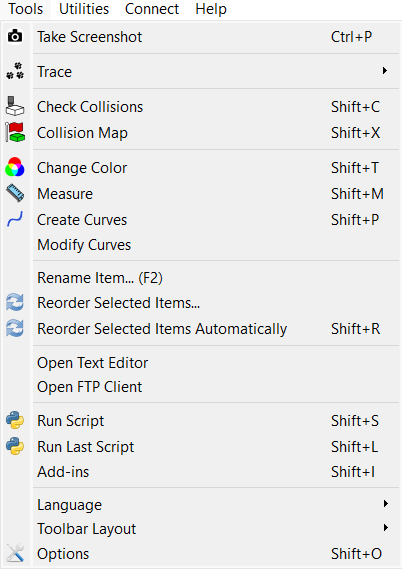
5.工具:工具菜单包括检测碰撞,几何点测量,以及“选项”菜单。
6.实用程序:实用程序菜单包括机器人加工设置,TCP或参考坐标系校准,机器人3D打印,机器人校准... 这些操作可能需要额外的软件许可。
7.连接:连接至一台机器人,测量设备或者相机仿真。
8.帮助:打开在线帮助文件(F1),查看版本更新以及设置软件许可。
文件菜单
RoboDK的文件菜单允许您打开和保存RoboDK项目。您还可以加载RoboDK支持的任何类型的文件,或使用不同格式或方法导出项目。





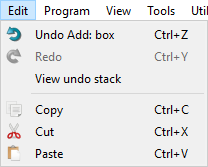
编辑菜单
撤销(Ctrl+Z)和重做(Ctrl+Y)在Edit菜单内。可以在撤销堆栈内前进或者后退,选择回到某一状态。
可以在工作站树型结构中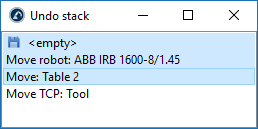



程序菜单
程序菜单包括了关于离线编程以及生成程序需要的所有项目。可以给机器人添加新的仿真程序,参考坐标系,机器人目标或者机器人工具。这些离线编程项目(参考坐标,目标,工具,等等)出现在离线生成的程序中。




帮助文件的程序说明部分提供了使用GUI执行机器人程序指令的更多信息。

最后,可以

查看菜单
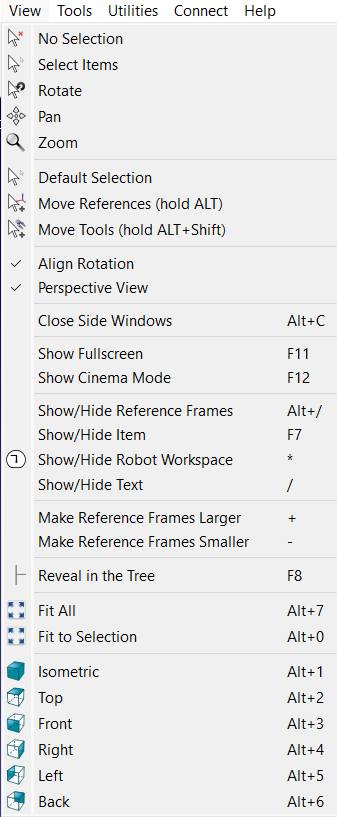
在视图菜单中包括3D空间巡航所需要的选项。在该菜单中,可以旋转,平移或缩放视图(或者在3D视图内使用右键菜单)。便于通过笔记本电脑的触摸板进行3D视图(代替鼠标)。
需要根据任意方向自由旋转,则取消选择:查看➔对齐姿态。否则,默认状态下RoboDK将XY平面锁定为水平面。
可以通过星号键(*)显示或者隐藏机器人的有效工作空间。还可以使用F7键查看被隐藏的物体。

工具菜单
在工具菜单中包括通用工具,例如3D视图截屏,启动机器人路径跟踪,启动碰撞检测,几何点坐标的测量等等。
启动


可以通过选择工具➔ 语言设置RoboDK界面的语言,改变将即时生效。
工具栏布局 设置默认的工具栏布局。或者,可以选择简化的工具栏或者复杂的工具栏。
选择
实用程序菜单
通过实用程序菜单,可以执行特定任务来设置机器人和执行特定制造操作,如机器人加工、钻孔或 3D 打印。
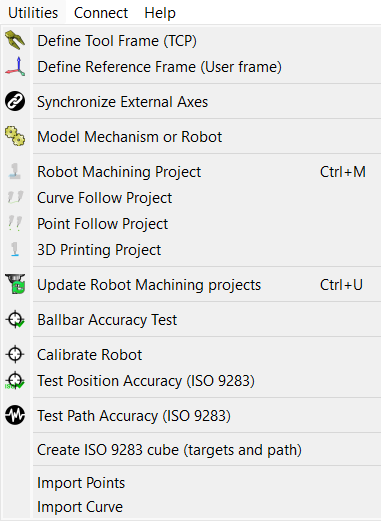



通过球杆仪精度测试,可以使用伸缩式双球杆仪检查机器人的性能。有关机器人球杆仪测试的更多信息,请访问:https://robodk.com.cn/cn/ballbar-test。


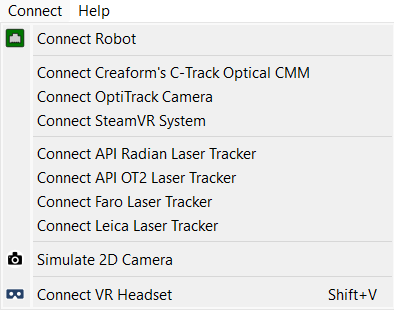
连接菜单
与机器人建立连接。通过输入连接参数,例如机器人IP地址、FTP用户名与密码,建立RoboDK与机器人之间的连接。可以通过FTP连接传输机器人程序,或者在PC电脑上与RoboDK支持的机器人控制器直接连接并运行机器人程序(通过RoboDK机器人驱动器)。用户也可以开发自己的机器人控制器,更多信息详见机器人驱动器章节。
RoboDK还可以连接支持的测量系统,例如激光追踪仪或者Creaform Optical CMM,连接这些设备可以实现机器人校准与性能测试的全自动化。
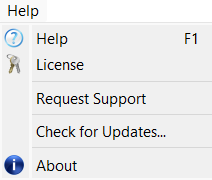
帮助菜单
在帮助菜单中选择帮助
选择检查更新…查看软件版本是否需要更新。弹出窗会提示安装新的版本或者当前版本无需更新。如果没有信息弹出,说明RoboDK与因特网的连接或被防火墙阻止。
现代图标
RoboDK 5.7 及更新版本受益于重新设计的图标,可通过激活工具➔选项➔一般➔ 使用现代图标。下表列出了主要图标及其新设计的概览。
Tip:选择工具➔选项➔一般➔显示工具栏文本,在工具栏中显示图标名称,这有助于可以帮助你过渡到较新的图标。
传统 | 现代 |
|
|
| 打开 |
|
| 打开在线模型库 |
|
| 保存工作站 |
|
| 撤销 |
|
| 重做 |
|
| 添加参考坐标系 |
|
| 添加机器人目标 |
|
| Fit All全视图 |
|
| 等距视图 显示工作空间等距视图 |
|
| 移动坐标系 |
|
| 移动TCP(机器人工具中心点) |
|
| 碰撞检测 |
|
| 快速仿真 |
|
| 暂停仿真 |
|
| 添加机器人仿真程序 |
|
| 添加Python程序 |
|
| 关节运动指令 |
|
| 线性运动指令 |
|
| 导出仿真文件 |