Navigation offcanvas
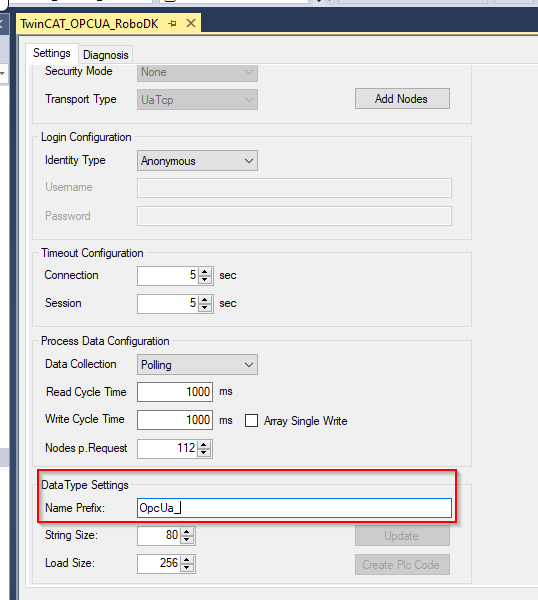
在此字段中配置你的名称前缀。
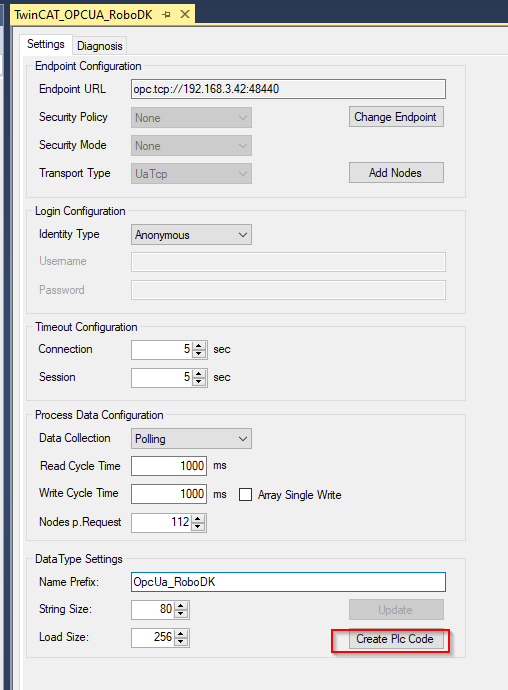
点击:Create Plc Code,在TwinCAT创建PLC代码。
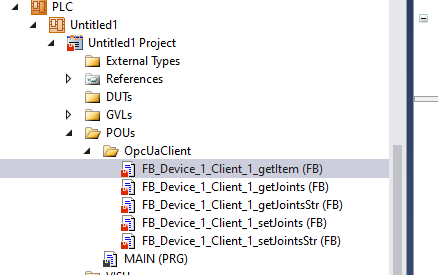
在项目中创建文件夹:OpcUaClient,并以IEC61131-3功能块格式创建所有RoboDK方法。