Navigation offcanvas
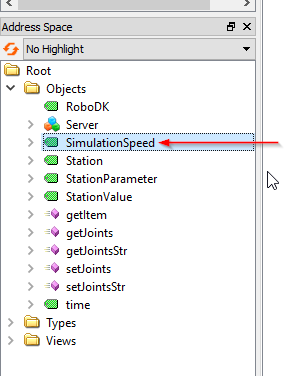
SimulationSpeed节点:显示实际仿真速度,并允许用户覆盖当前仿真速度。
节点值参考模拟速度的滑动条。
可以从该节点读取当前的模拟结果,并可以覆盖模拟速度。