Navigation offcanvas
setJointsStr 是一个允许用户根据字符串值设置机器人关节值的方法。
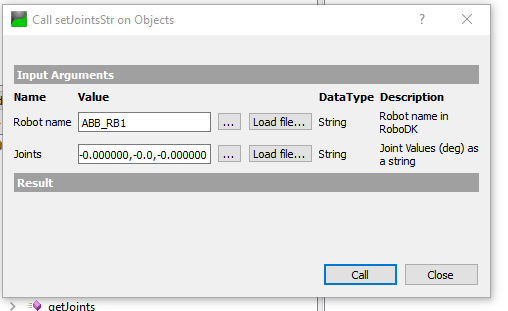
在机器人名称中,传递的是 ABB_RB1,我们只需在关节参数中传递一个包含关节值的字符串即可。
举例来说:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000