服务器节点
RoboDK OPC UA服务器内有一些节点,可传输工作站的一些信息。
RoboDK
RoboDK节点:提供RoboDK软件实际版本的节点。
本案例使用的版本:RoboDK 64 Bit v5.5.3.23031。

仿真速度
SimulationSpeed节点:显示实际仿真速度,并允许用户覆盖当前仿真速度。
节点值参考模拟速度的滑动条。
可以从该节点读取当前的模拟结果,并可以覆盖模拟速度。

站点
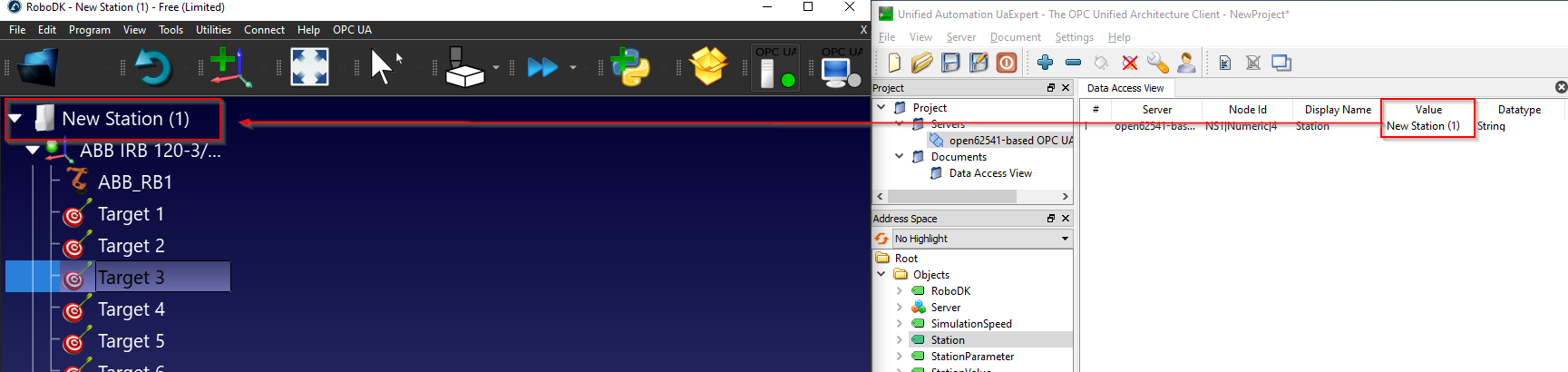
Station节点:用户获取RoboDK中当前站名称。
如下所示,Station节点在 RoboDK 中引用了你的工作站名称:New Station(1)。
工作站参数/值
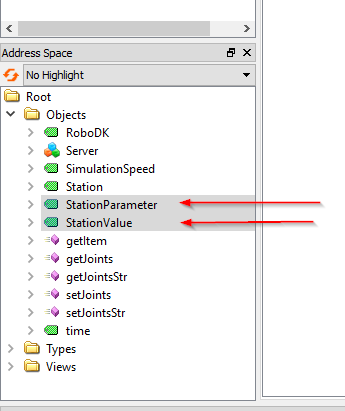
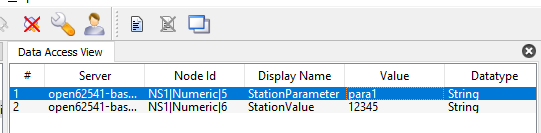
站参数(StationParameter)和站值(StationValue)是一对设置节点,允许用户获取或设置站内的任何参数。RoboDK OPC UA 服务器将持续监控 "StationParameter "的实际值,并从 "Station Value "节点返回该 "StationParameter "的值。
Note:如果站参数不存在,则返回空字符串。
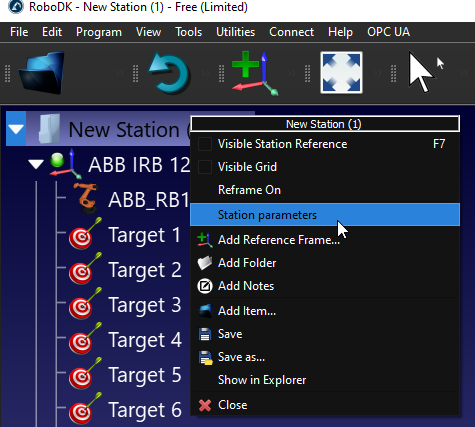
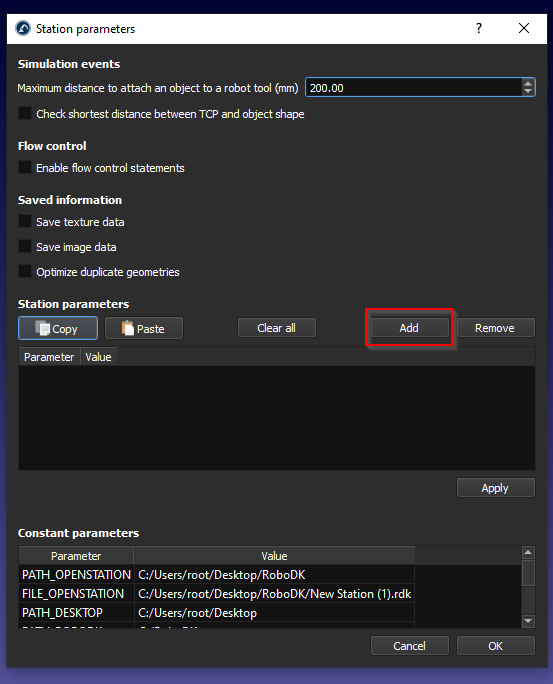
在RoboDK中右键单击工作站,点击:工作站参数。
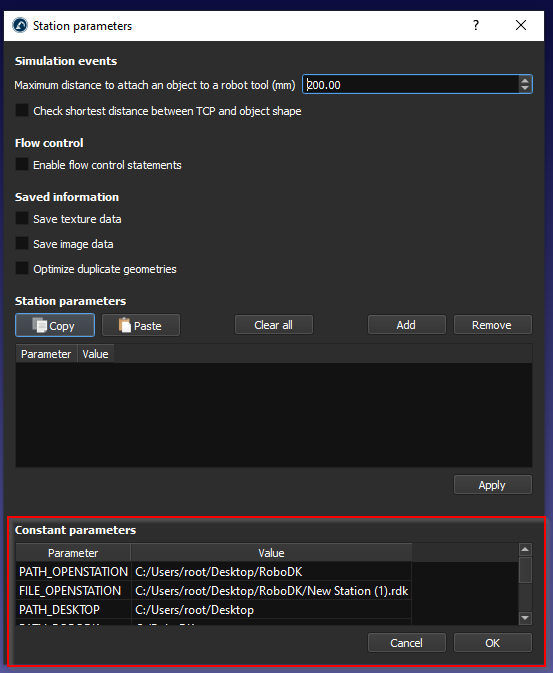
在固定参数模块,我们可以看到工作站的默认参数和值。
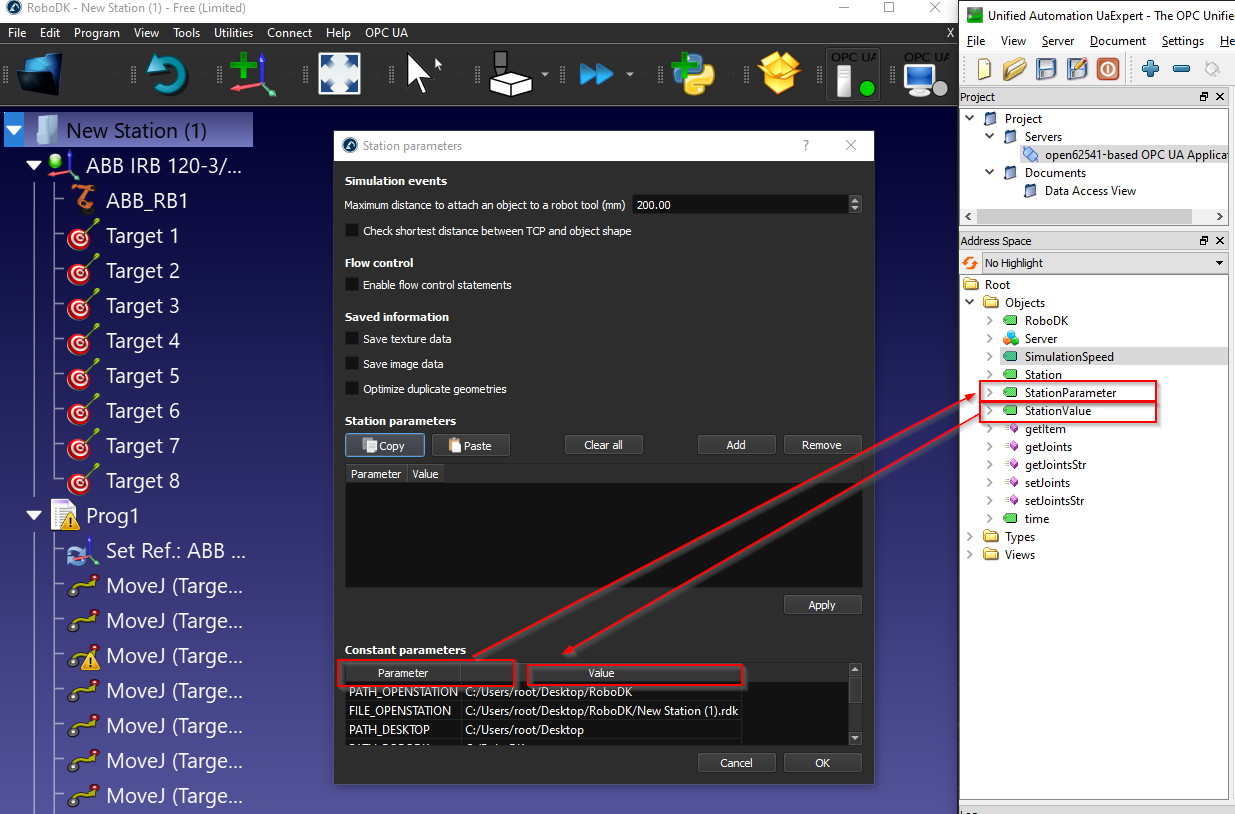
工作站参数指的是"Parameter"字段,台站值指的是"Value"字段。
在工作站参数窗口,点击按钮:添加,我们就可以创建参数。
这样就添加了一个新的工作站参数。
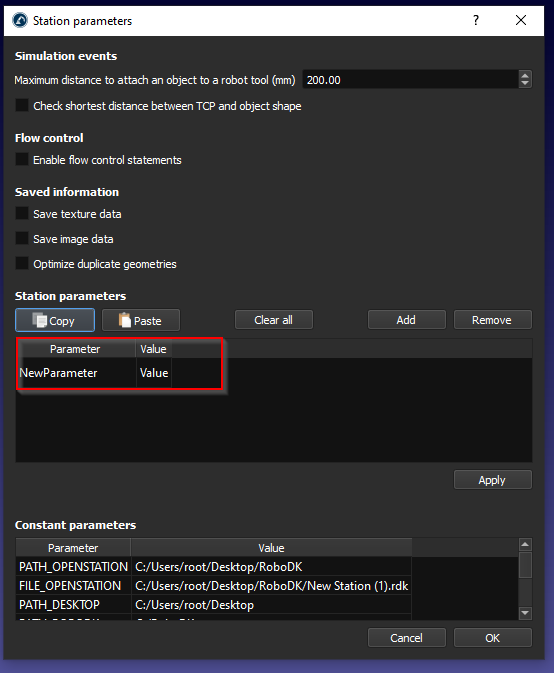
输入参数名称和值,然后点击应用即可保存。
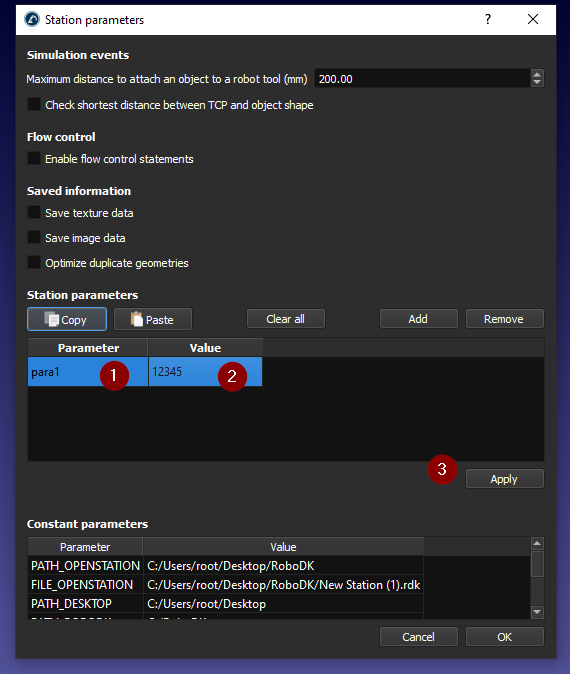
你还可以获得自己的站点的参数。
时间
time节点:可以获取RoboDK站当前的时间。
返回值是DataTime格式。

会自动更新数据。
