图层设计
通过层叠设计功能可自定义每层物料的排列方式:
按照以下步骤创建图层布局:
1.移动到Layer选项卡,创建图层设计。
2.确保根据需要设置Grid。在本例中,我们将使用12mm。你也可以更改 "Object Spacing"中的值,使箱与箱之间的间距保持不变;我们将使用 15 mm。
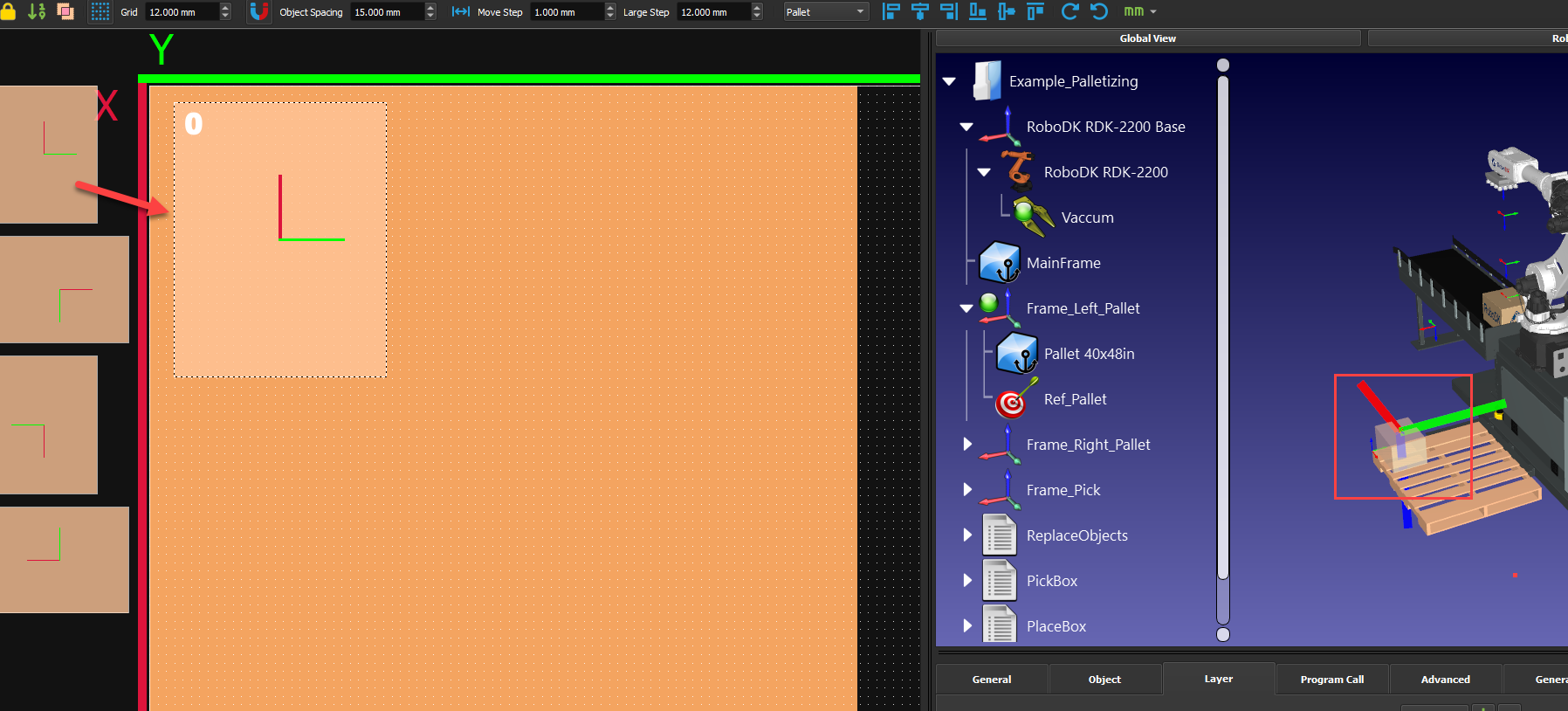
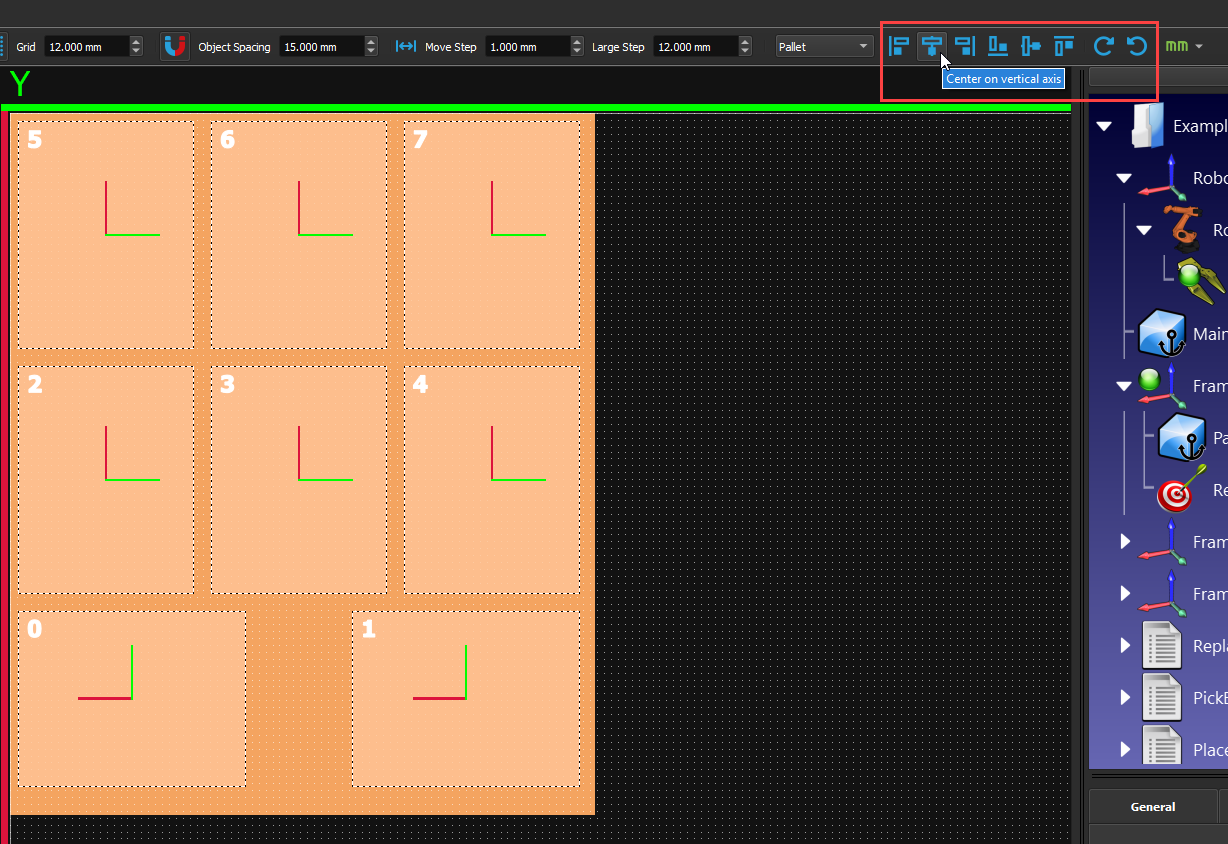
3.从左侧选择一个箱,然后拖放到托盘上。
4.在 2D 界面上移动箱体时,它将出现在 3D 环境中。如果 3D 环境中的箱变为红色,则表示机器人无法触及。
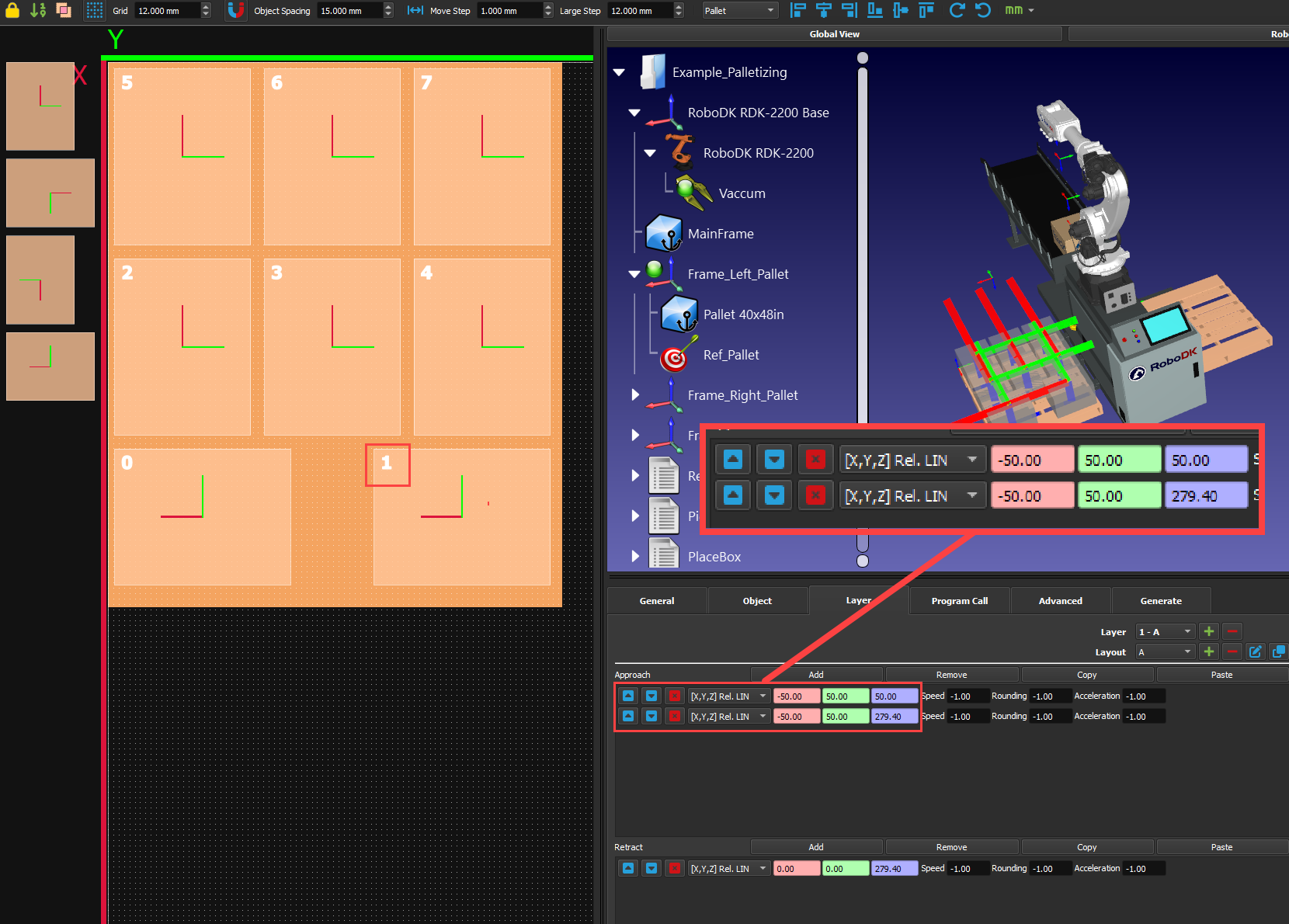
5.创建第一个图层布局。每个箱体左上角的数字表示其放置顺序编号. 每个箱体左上角的数字表示其放置顺序编号。通过添加辅助线定义:接近路径(Approach)、回退路径(Retract)。示例数值仅供参考,建议通过以下方式测试效果:推荐初始参数:接近距离:+50mm(Z轴方向),回退距离:-30mm(Z轴方向),修改后实时观察3D视图中机器人轨迹变化。
6.通过右上方的不同对齐按钮,你可以轻松调整箱体的位置。选择所有箱,点击不同的选项,直到满意为止。你还可以旋转你的箱,而不是按照正确的方向生成新的箱。
7.按下Layer旁"+ "按钮,在Layer堆栈中添加一个新图层。添加新图层将复制与其下图层相同的图案。
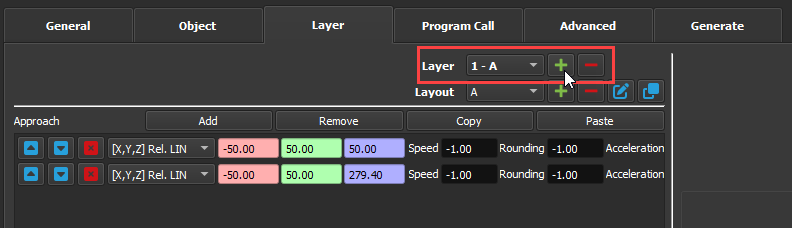
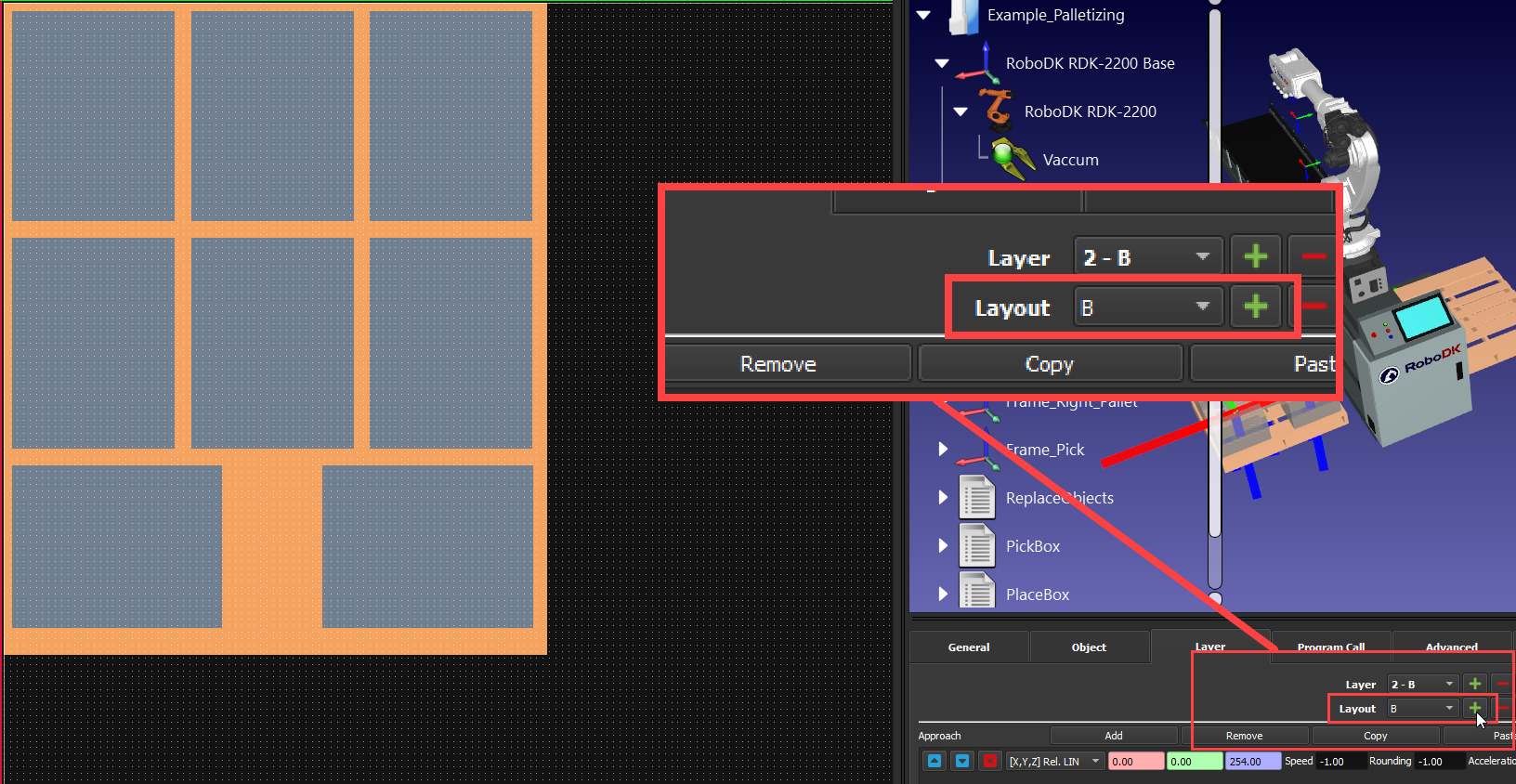
8.你可以按下 "Layout "旁边的 "+ "按钮来创建新的布局(图案)。你仍会看到之前的图层布局呈灰色,这样你就可以在其上正确定位新箱。
9.创建替代布局。按住 CTRL 键并使用键盘箭头可以微调箱的位置。你可以在窗口顶部的 "Move Step "中更改增量的大小。
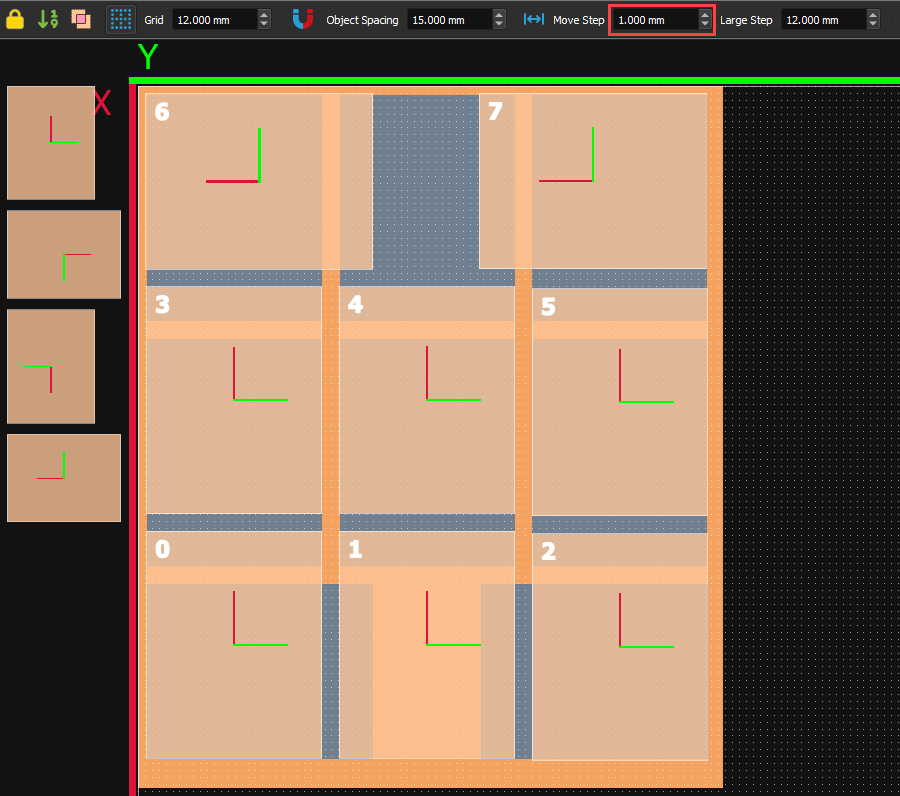
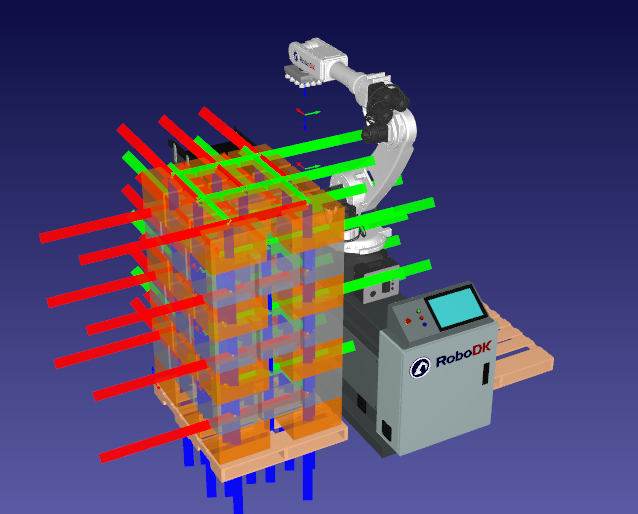
10.然后,你可以添加想要的层数,并可以选择交替使用。只需在 3D 视图中查看箱体的颜色,确保箱体仍都在机器人的触及范围内即可。
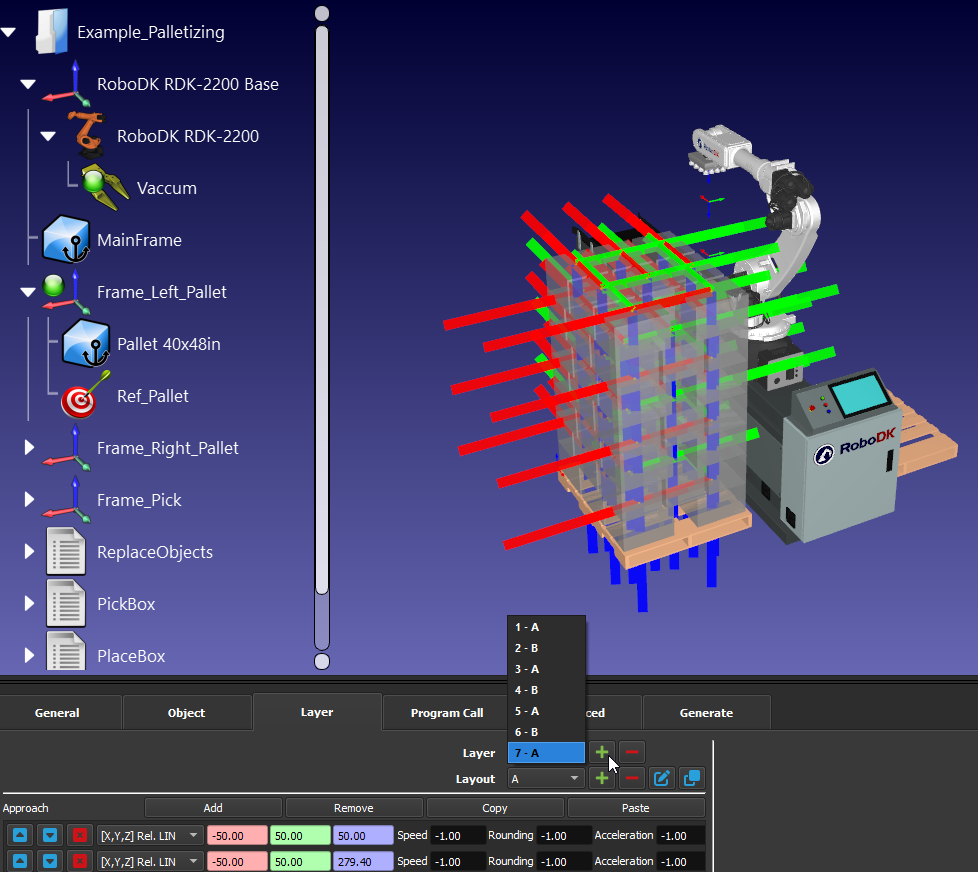
Note:如果进近/缩回位置超出范围,3D 界面会通过将箱变为橙色反馈。
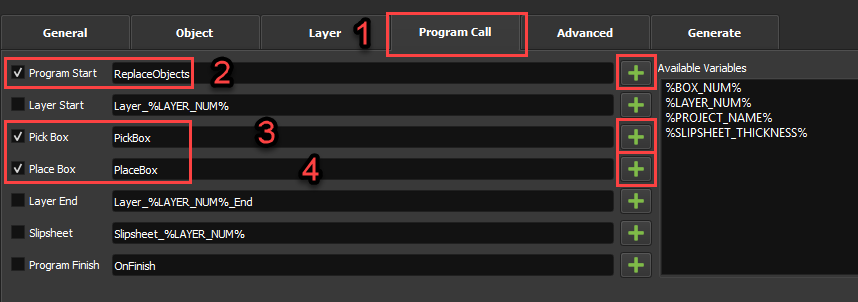
11.在Program Call选项卡中,你可以通过点击 "+"按钮为不同事件选择程序,然后在相应的箱中旁勾选。例如,你至少需要选择一个"Pick Box"和一个"Place Box"程序,否则,你将没有一个可以运行的项目。在本例中,我们还将使用 "Program Start"程序,但你也可以创建一个 "Go Home"程序,并在"Program Finishi"中选择该程序,这样托盘码垛完成后,机器人就可以回到Home位置。