生成程序
完成准备步骤后,你就可以生成机器人程序了。然后你需要使用适合你机器人品牌的后处理器生成程序。
Tip:有关程序生成和后处理器的更多信息,请参阅后处理器章节。
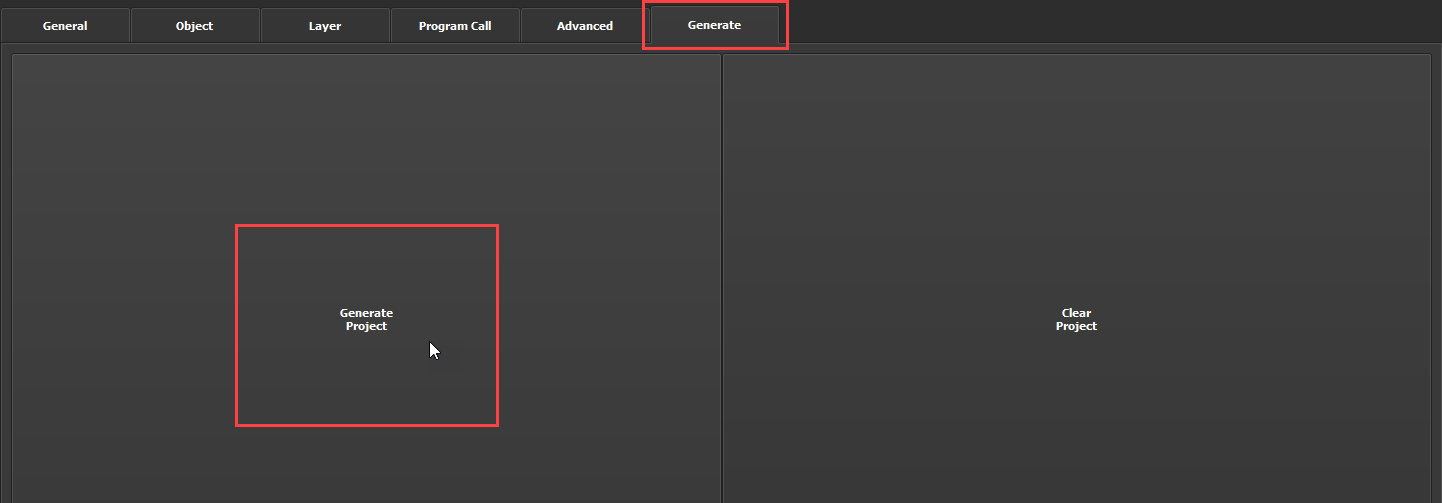
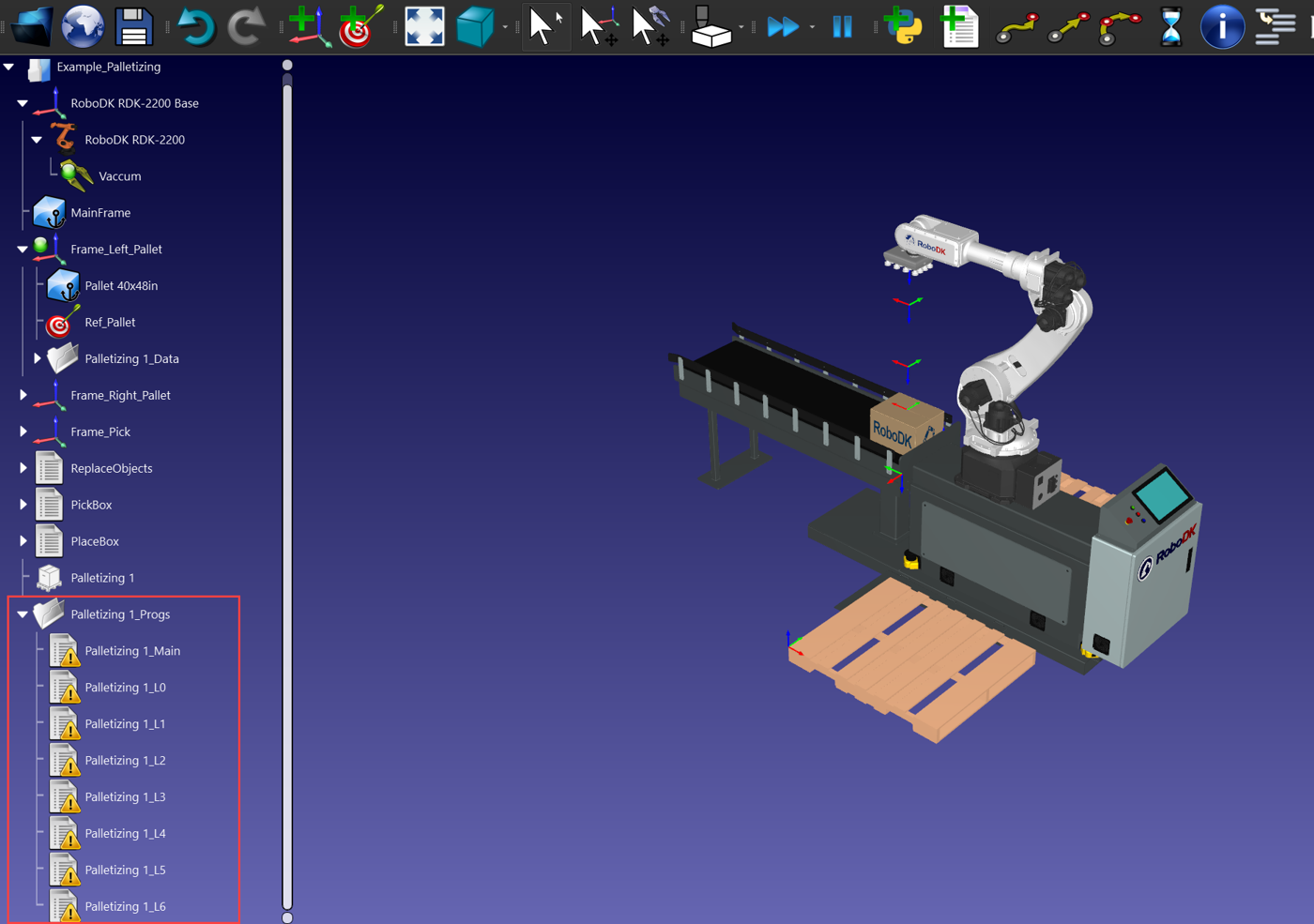
1.在Generate选项卡中选择:Generate Project。现在可以关闭窗口返回项目。现在你应该有了一个主程序和每个图层的单独程序。
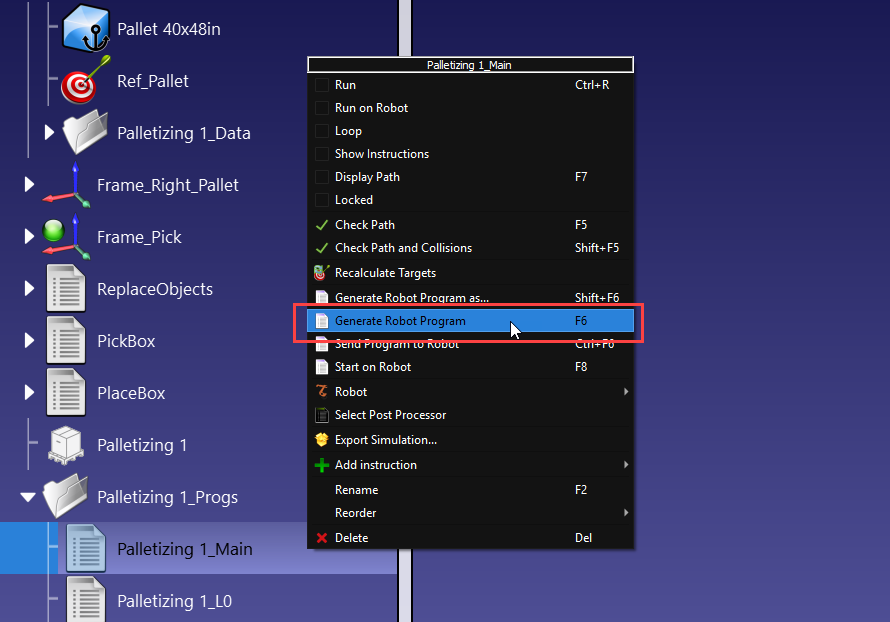
2.双击Palletizing_1_Main,运行主程序。如果运行正确,右击主程序,选择:生成机器人程序,创建机器人控制器可以执行的程序。
完成准备步骤后,你就可以生成机器人程序了。然后你需要使用适合你机器人品牌的后处理器生成程序。
Tip:有关程序生成和后处理器的更多信息,请参阅后处理器章节。
1.在Generate选项卡中选择:Generate Project。现在可以关闭窗口返回项目。现在你应该有了一个主程序和每个图层的单独程序。
2.双击Palletizing_1_Main,运行主程序。如果运行正确,右击主程序,选择:生成机器人程序,创建机器人控制器可以执行的程序。