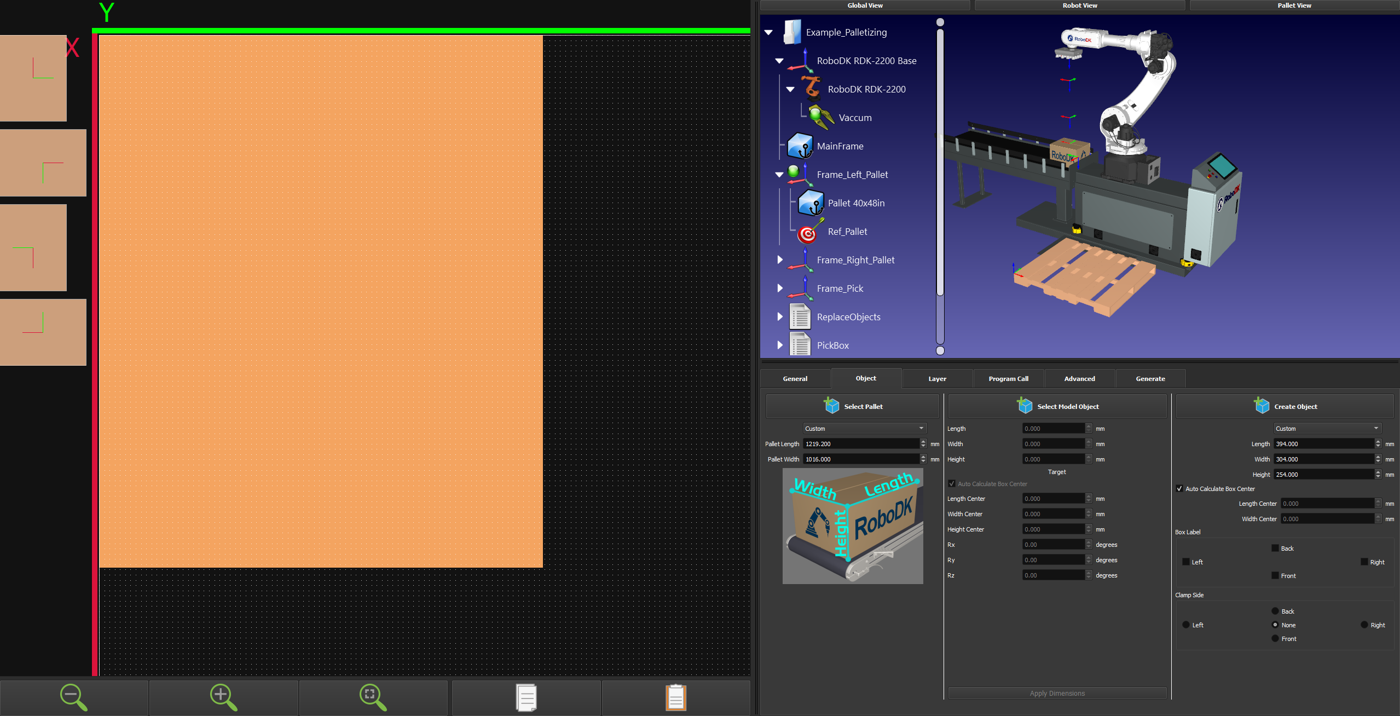
设置码垛项目
当打开码垛主界面时,可选择三种模式:
请按照以下步骤设置你的码垛项目:
1.在码垛项目界面选找到码垛选项:Palletize,点击Reference的"+"按钮,选择托盘参考坐标系。然后,点击Robot Configuration的"+"按钮,选择我们之前创建的目标:Ref_Pallet。
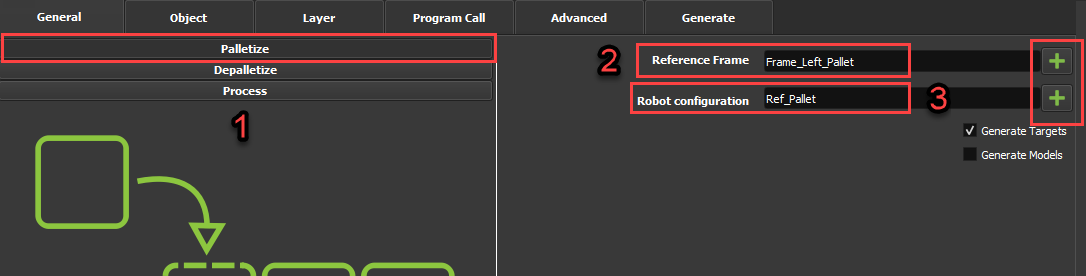
Tip: 若机器人单轴旋转超过350°,我们建议你限制旋转角度,以简化码垛算法的工作。为此,请打开机器人面板,双击关节点动部分的下限或上限。
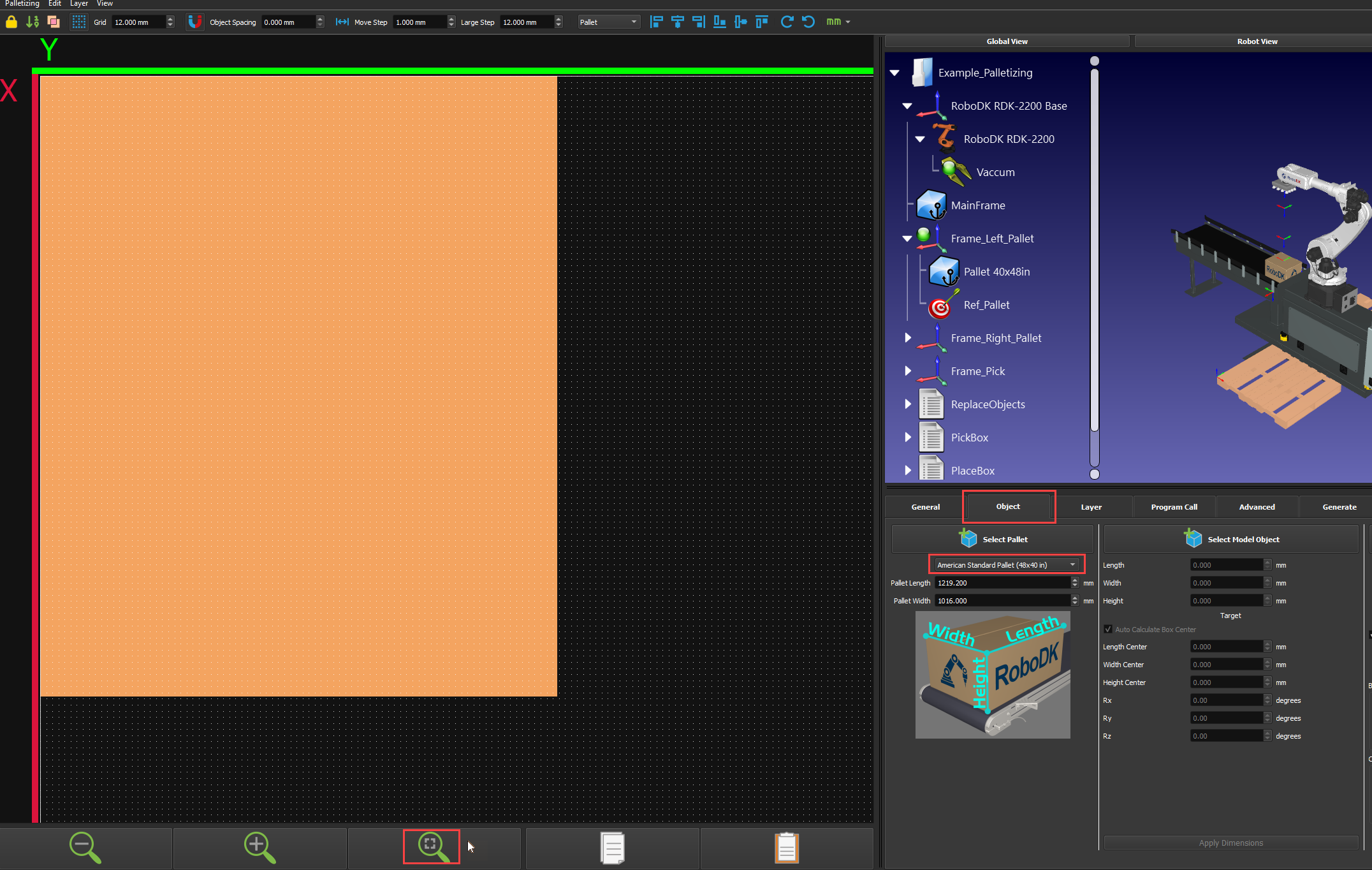
2.选择Object选项卡,输入托盘和箱的尺寸。
3.选择托盘尺寸的预设值,或者手动输入尺寸。然后点击左下角左数第3个图标:Zoom to fit,这样就可以显示出来二维托盘全貌。
4.选择箱体预设或输入自定义尺寸后点击:Create object。
Note:可指定标签面或夹爪接触面,确保2D布局中的箱体方向正确。
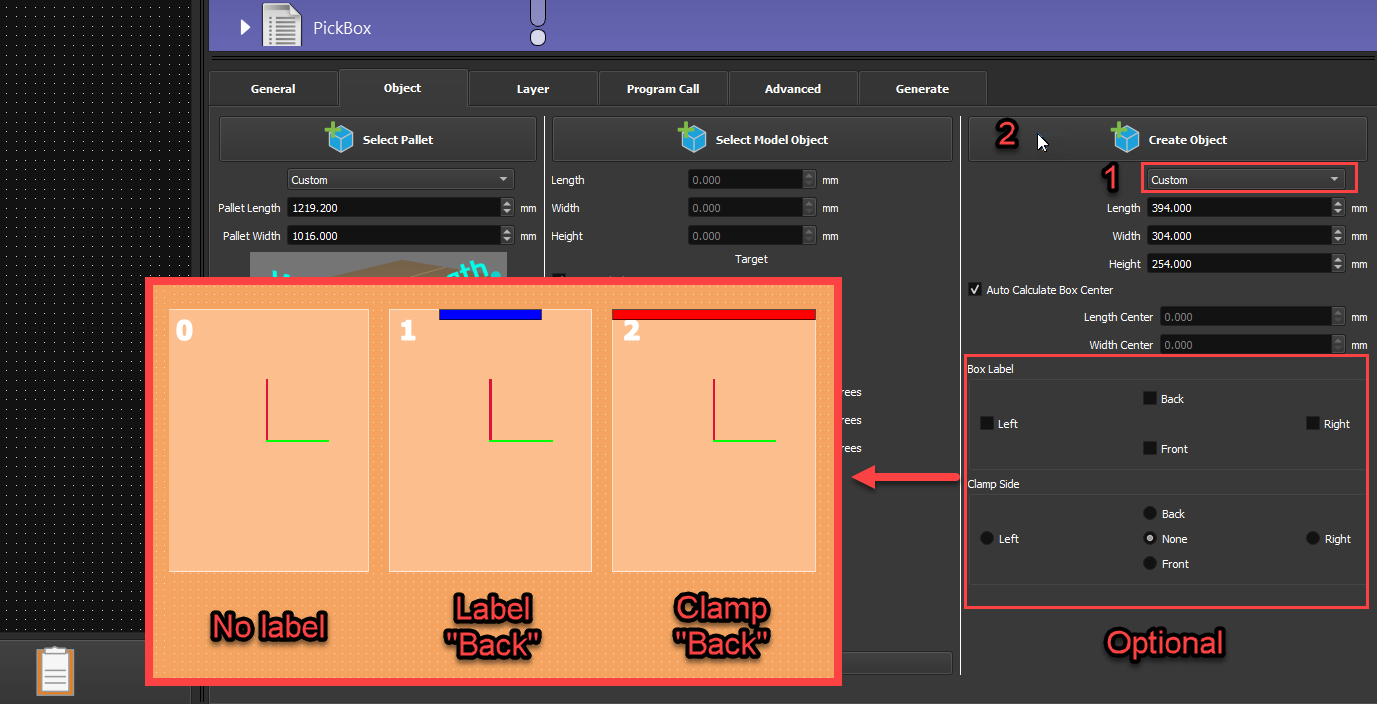
5.创建物体后,界面左侧会显示4个90°旋转方向的箱体模型,一条红线和一条绿线将显示 TCP 绕 Z 轴的旋转。