码垛插件
你可以使用RoboDK的码垛插件完成自动化码垛。该插件通过直观的可视化界面,帮助你快速创建码垛程序。
本示例将引导你从零开始,逐步完成可导出为真实机器人程序的码垛仿真。最终生成的程序可直接加载到机器人控制器执行。
下载并激活码垛插件
最新版码垛插件可在插件市场获取。关于插件安装激活的详细说明,请参阅Add-in Manager章节。
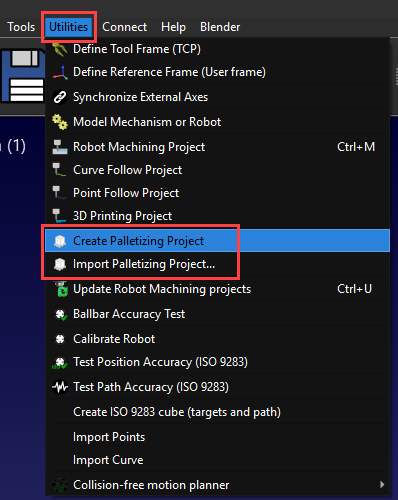
确认安装成功后,在实用程序菜单下应出现两个新选项:Create Palletizing Project和Import Palletizing Project…