创建码垛项目
码垛项目将帮助你实现机器人码垛过程的自动化。本节将介绍你可以自定义的码垛设置的主要功能。
按照以下步骤创建一个码垛项目:
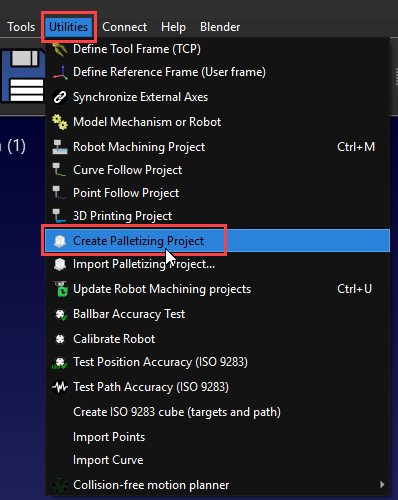
1.在菜单栏选择:实用程序,点击:Create Palletizing Project。
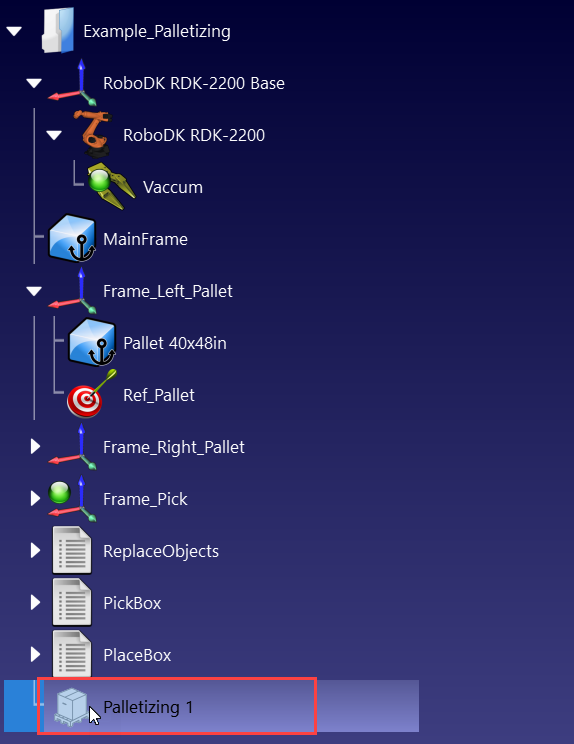
2.然后双击工作站树中的码垛项目:Palletizing 1。
Note:确保你使用的是 RoboDK 5.9.0 或更高版本。
设置码垛项目
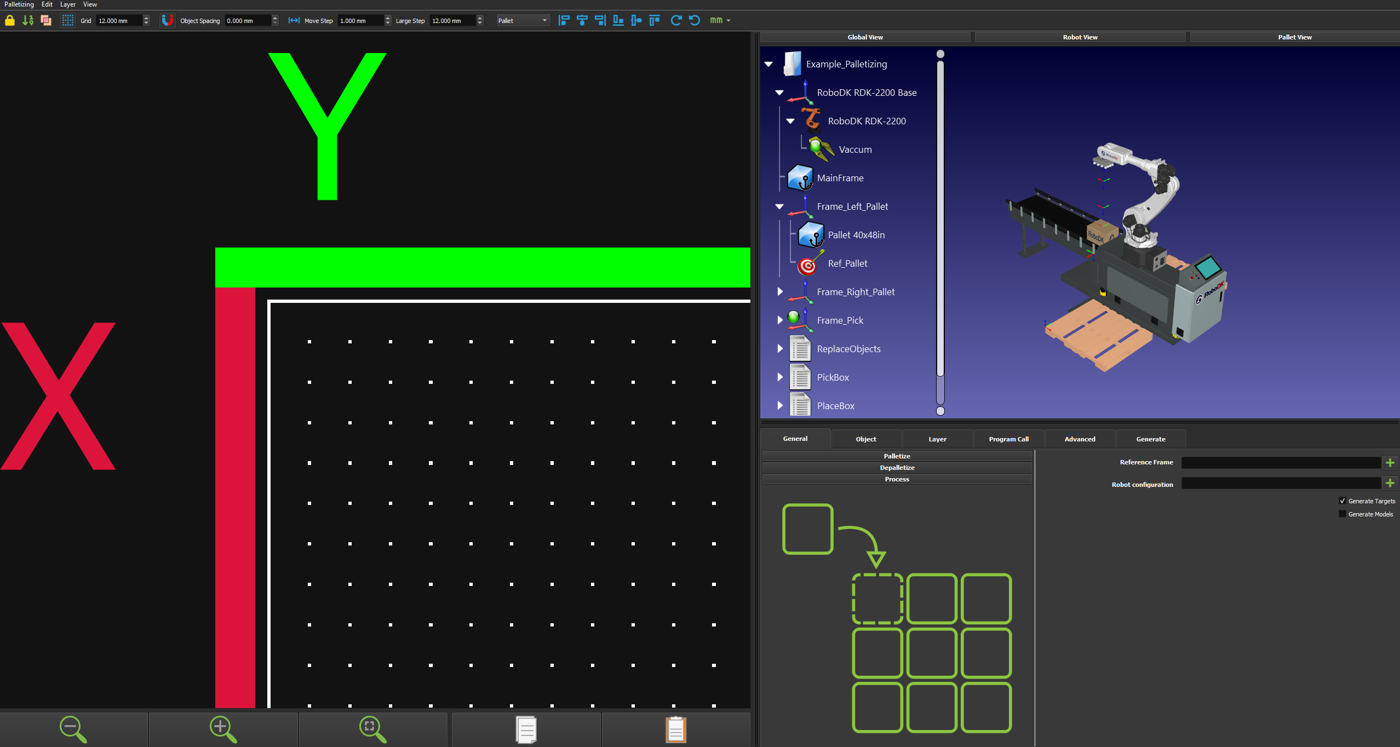
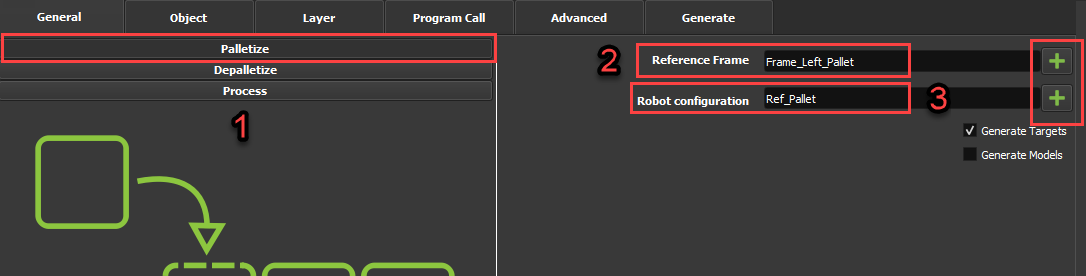
当打开码垛主界面时,可选择三种模式:
请按照以下步骤设置你的码垛项目:
1.在码垛项目界面选找到码垛选项:Palletize,点击Reference的"+"按钮,选择托盘参考坐标系。然后,点击Robot Configuration的"+"按钮,选择我们之前创建的目标:Ref_Pallet。
Tip: 若机器人单轴旋转超过350°,我们建议你限制旋转角度,以简化码垛算法的工作。为此,请打开机器人面板,双击关节点动部分的下限或上限。
2.选择Object选项卡,输入托盘和箱的尺寸。
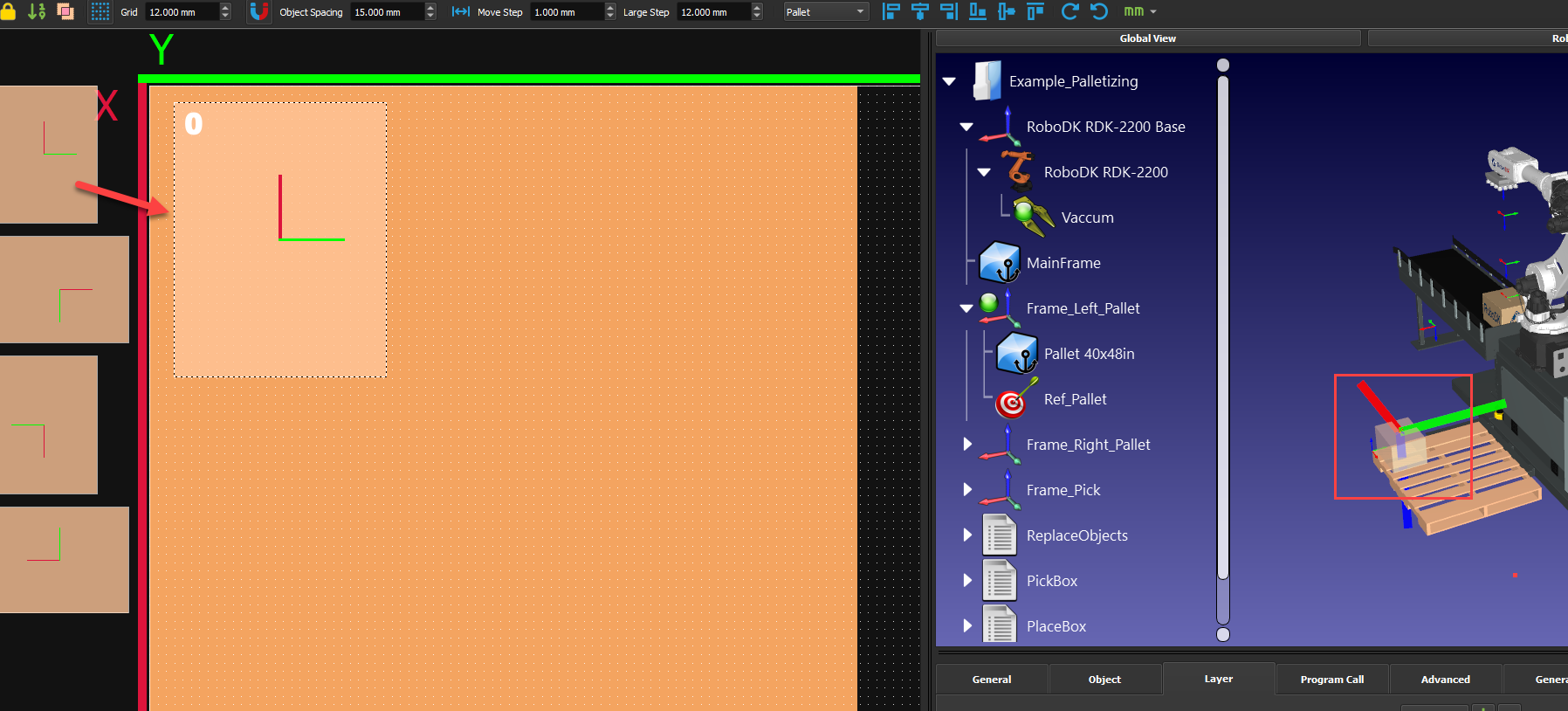
3.选择托盘尺寸的预设值,或者手动输入尺寸。然后点击左下角左数第3个图标:Zoom to fit,这样就可以显示出来二维托盘全貌。
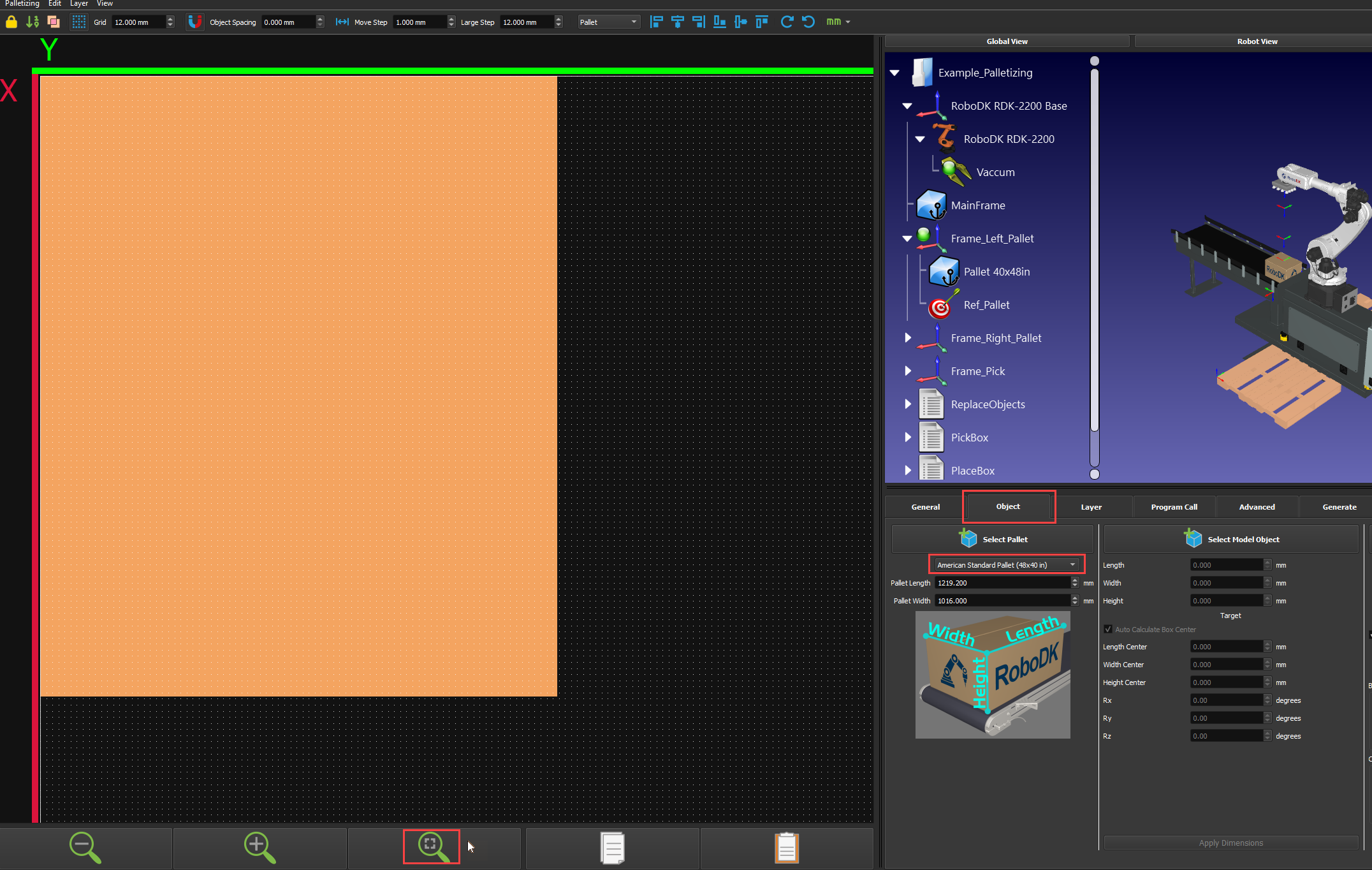
4.选择箱体预设或输入自定义尺寸后点击:Create object。
Note:可指定标签面或夹爪接触面,确保2D布局中的箱体方向正确。
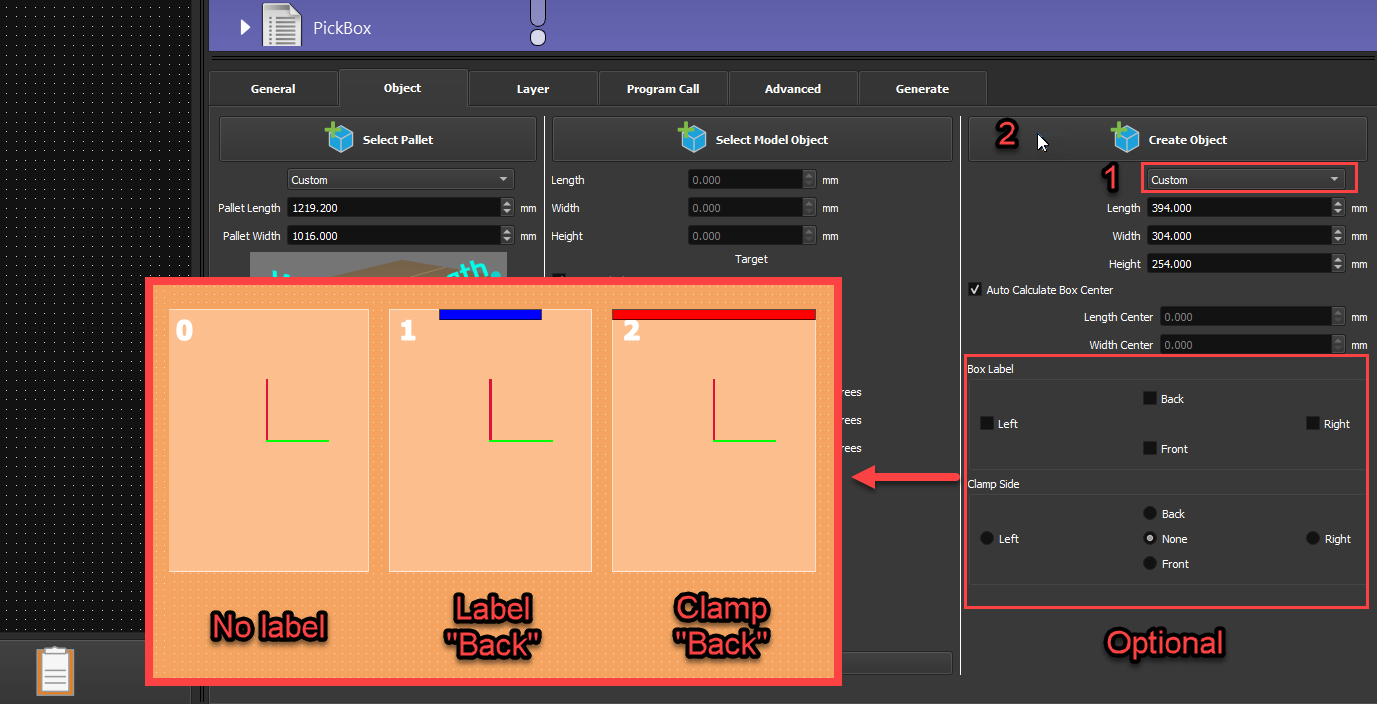
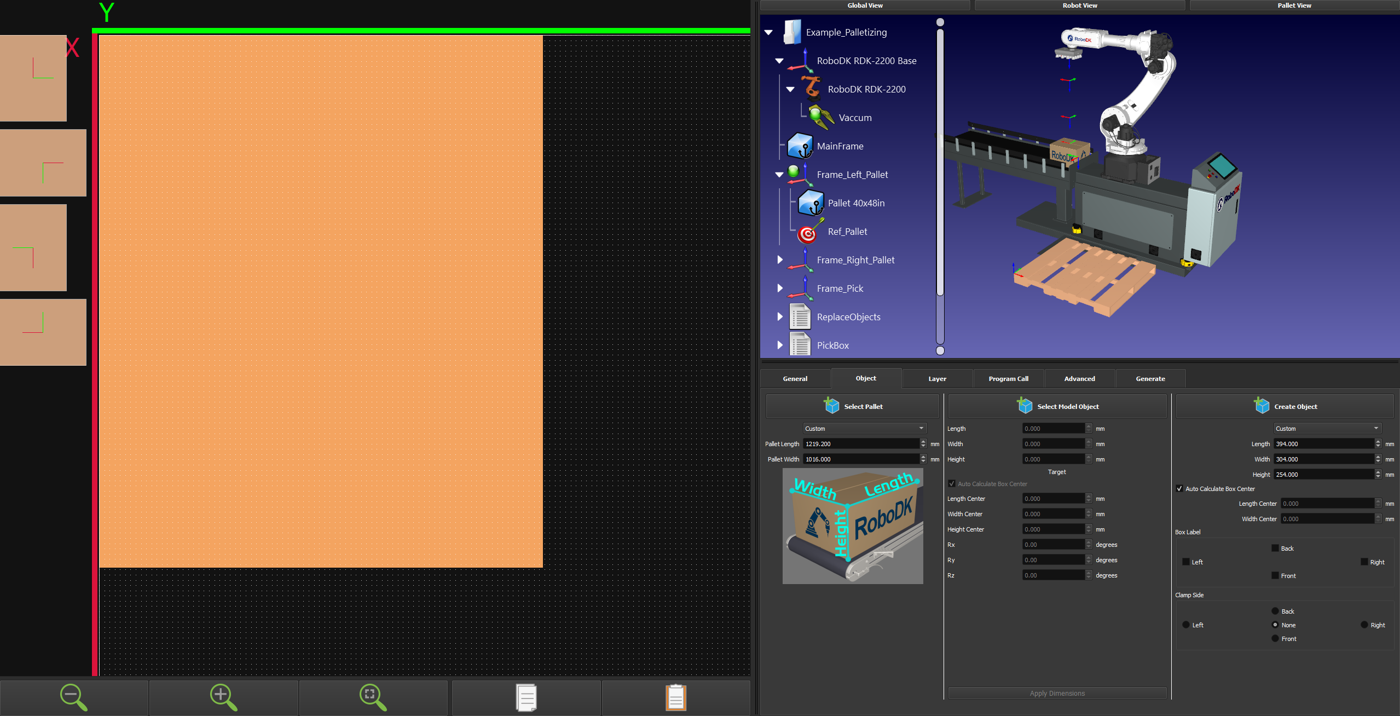
5.创建物体后,界面左侧会显示4个90°旋转方向的箱体模型,一条红线和一条绿线将显示 TCP 绕 Z 轴的旋转。
图层设计
通过层叠设计功能可自定义每层物料的排列方式:
按照以下步骤创建图层布局:
1.移动到Layer选项卡,创建图层设计。
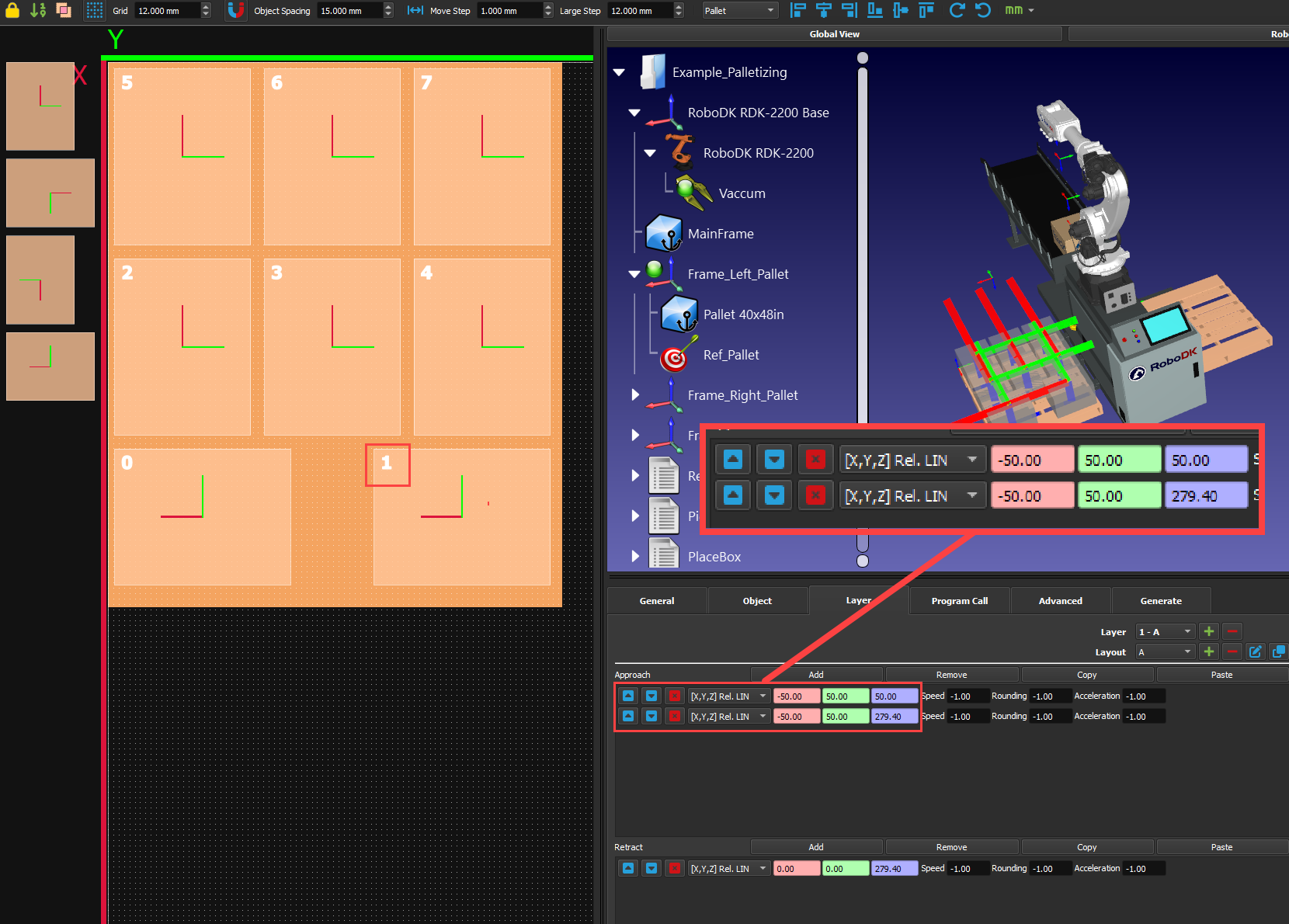
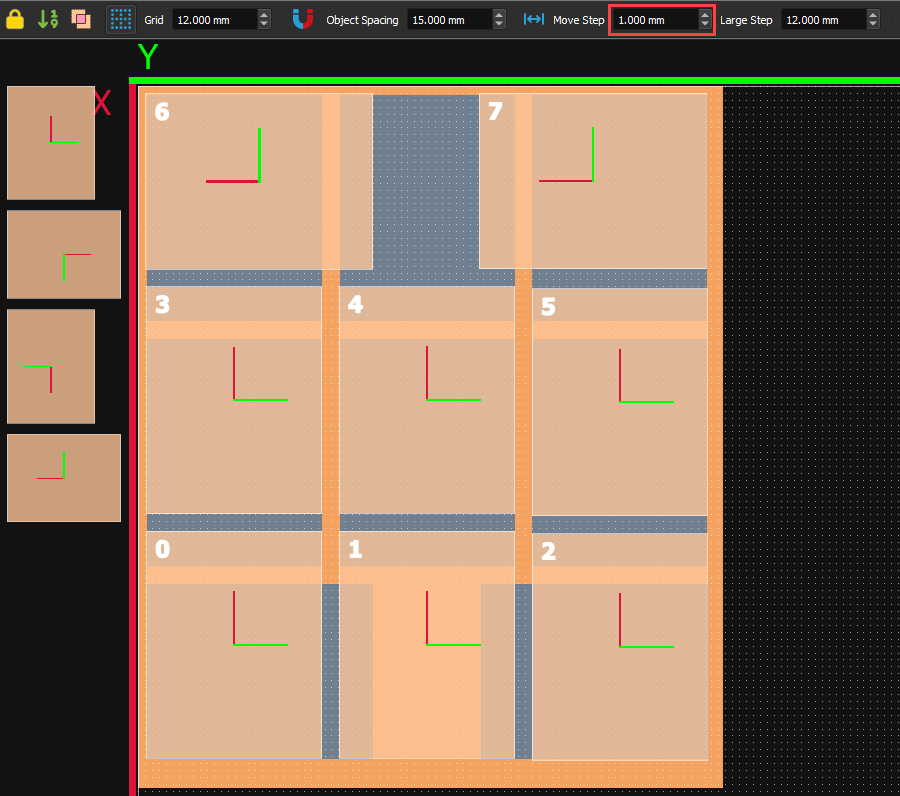
2.确保根据需要设置Grid。在本例中,我们将使用12mm。你也可以更改 "Object Spacing"中的值,使箱与箱之间的间距保持不变;我们将使用 15 mm。
3.从左侧选择一个箱,然后拖放到托盘上。
4.在 2D 界面上移动箱体时,它将出现在 3D 环境中。如果 3D 环境中的箱变为红色,则表示机器人无法触及。
5.创建第一个图层布局。每个箱体左上角的数字表示其放置顺序编号. 每个箱体左上角的数字表示其放置顺序编号。通过添加辅助线定义:接近路径(Approach)、回退路径(Retract)。示例数值仅供参考,建议通过以下方式测试效果:推荐初始参数:接近距离:+50mm(Z轴方向),回退距离:-30mm(Z轴方向),修改后实时观察3D视图中机器人轨迹变化。
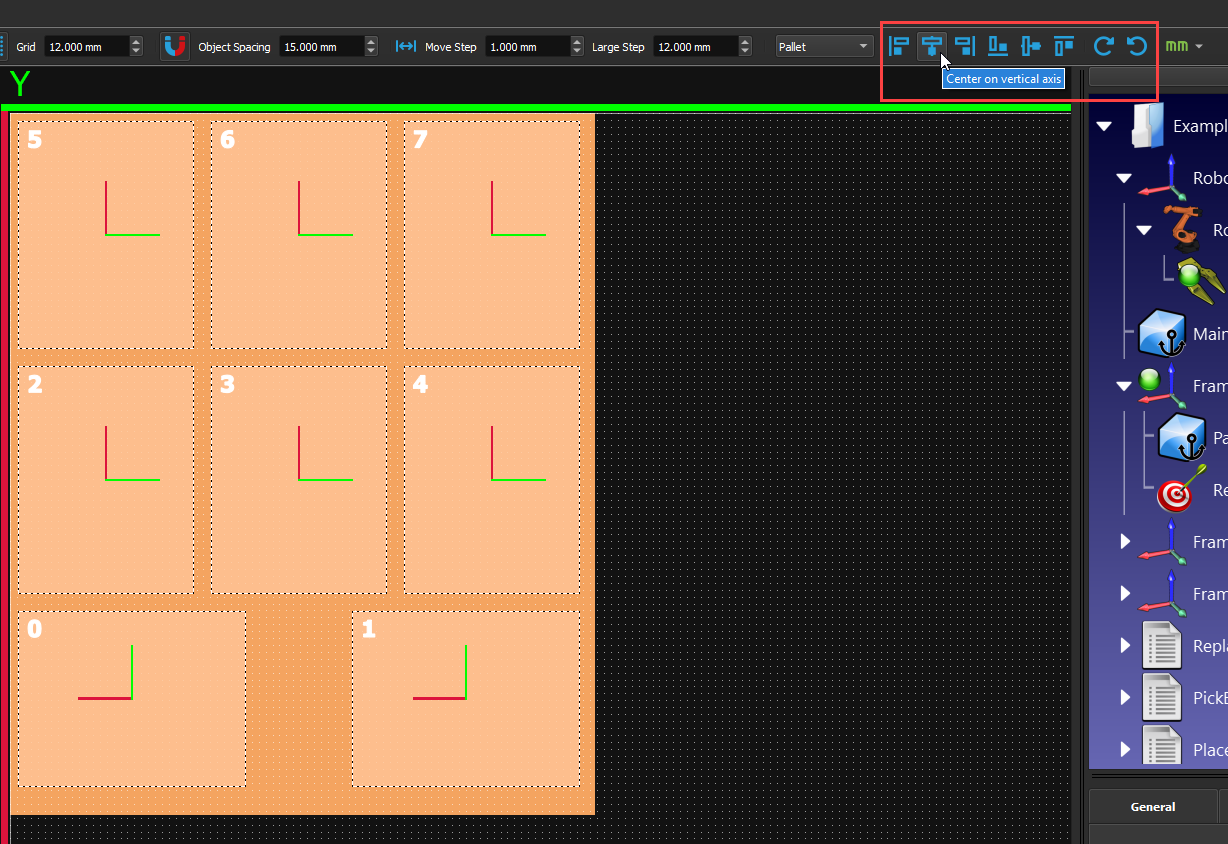
6.通过右上方的不同对齐按钮,你可以轻松调整箱体的位置。选择所有箱,点击不同的选项,直到满意为止。你还可以旋转你的箱,而不是按照正确的方向生成新的箱。
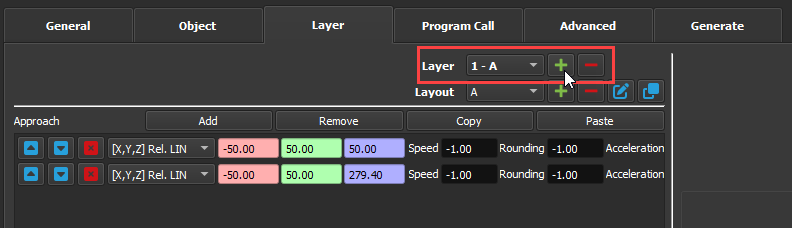
7.按下Layer旁"+ "按钮,在Layer堆栈中添加一个新图层。添加新图层将复制与其下图层相同的图案。
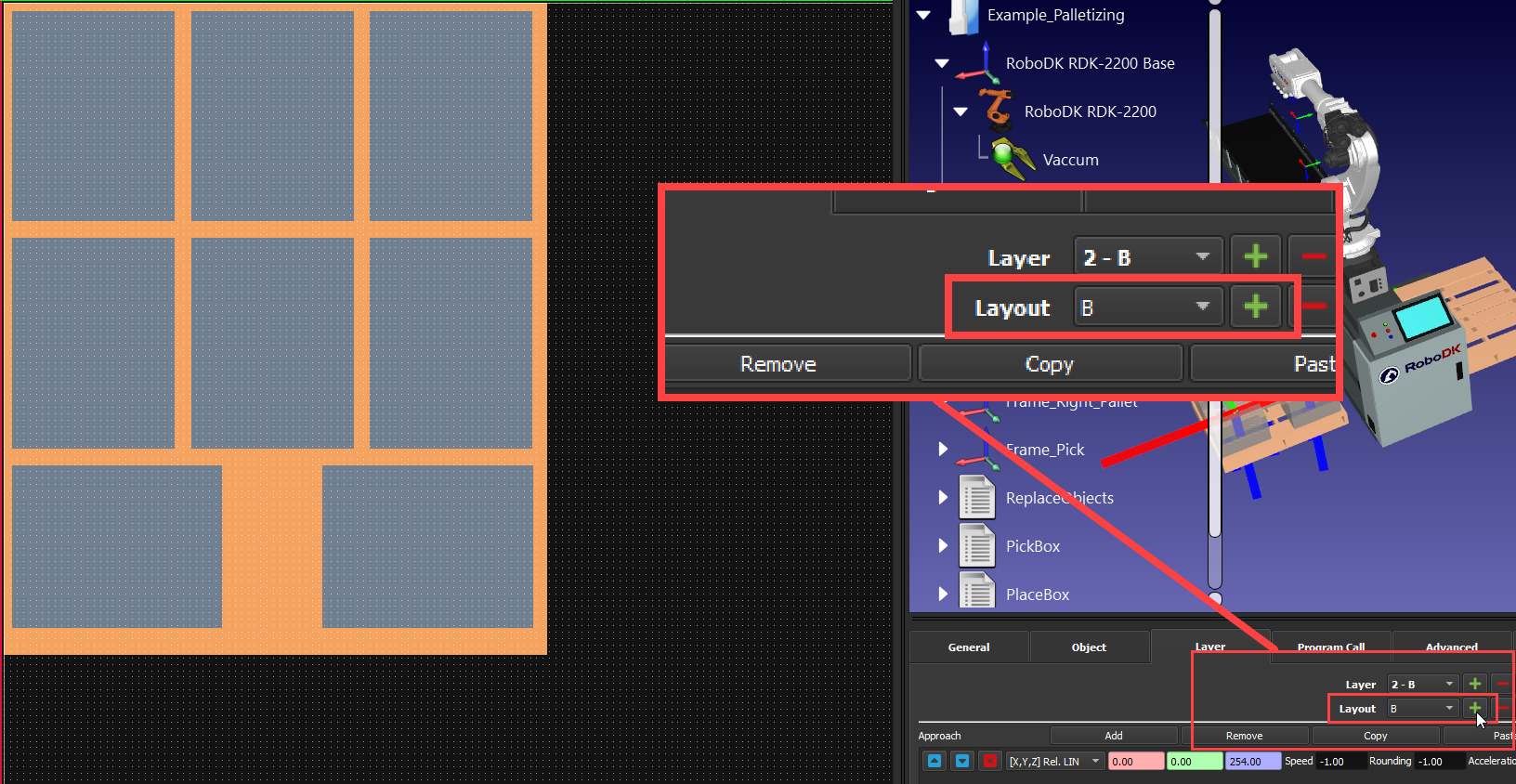
8.你可以按下 "Layout "旁边的 "+ "按钮来创建新的布局(图案)。你仍会看到之前的图层布局呈灰色,这样你就可以在其上正确定位新箱。
9.创建替代布局。按住 CTRL 键并使用键盘箭头可以微调箱的位置。你可以在窗口顶部的 "Move Step "中更改增量的大小。
10.然后,你可以添加想要的层数,并可以选择交替使用。只需在 3D 视图中查看箱体的颜色,确保箱体仍都在机器人的触及范围内即可。
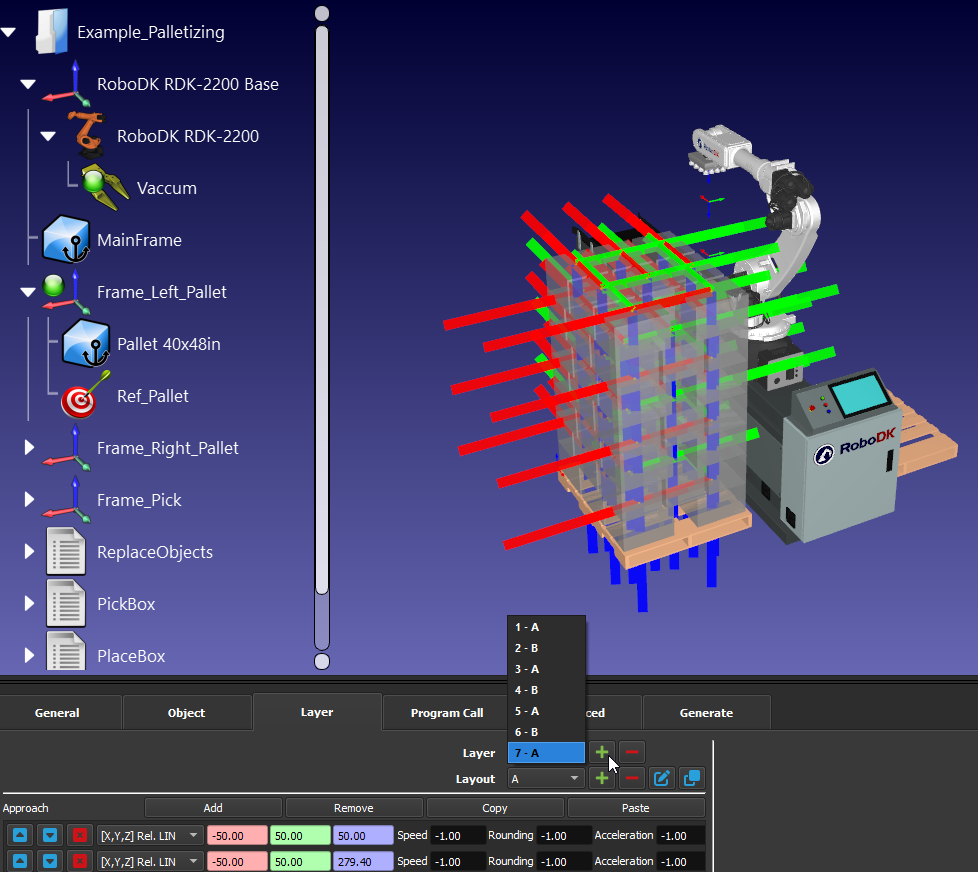
Note:如果进近/缩回位置超出范围,3D 界面会通过将箱变为橙色反馈。
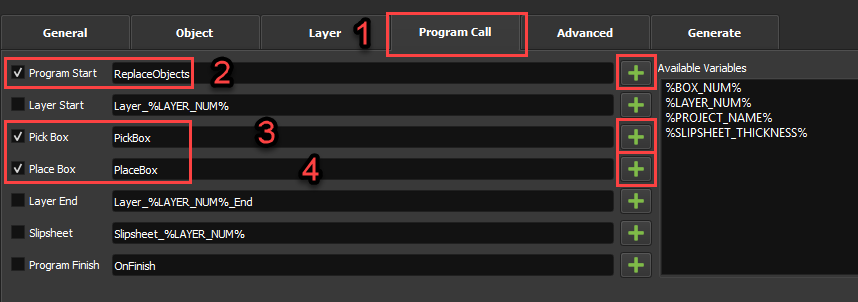
11.在Program Call选项卡中,你可以通过点击 "+"按钮为不同事件选择程序,然后在相应的箱中旁勾选。例如,你至少需要选择一个"Pick Box"和一个"Place Box"程序,否则,你将没有一个可以运行的项目。在本例中,我们还将使用 "Program Start"程序,但你也可以创建一个 "Go Home"程序,并在"Program Finishi"中选择该程序,这样托盘码垛完成后,机器人就可以回到Home位置。
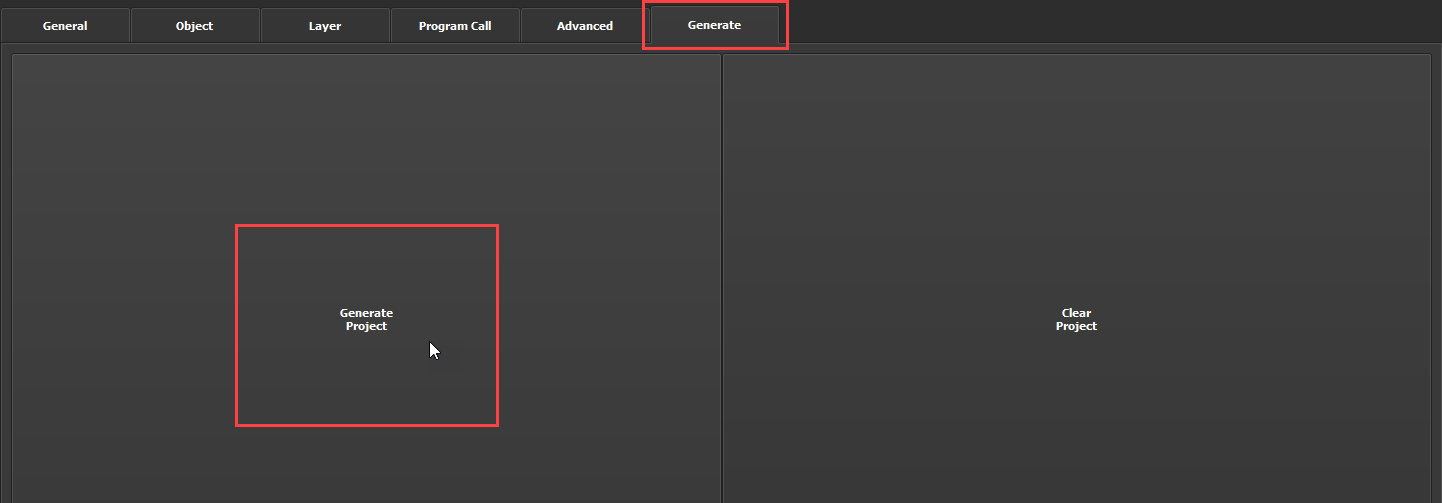
生成程序
完成准备步骤后,你就可以生成机器人程序了。然后你需要使用适合你机器人品牌的后处理器生成程序。
Tip:有关程序生成和后处理器的更多信息,请参阅后处理器章节。
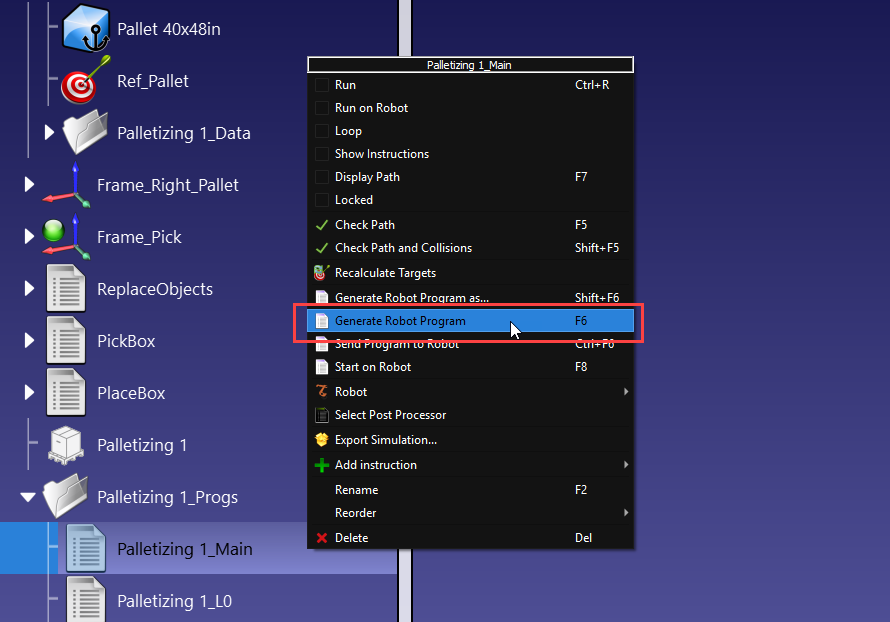
1.在Generate选项卡中选择:Generate Project。现在可以关闭窗口返回项目。现在你应该有了一个主程序和每个图层的单独程序。
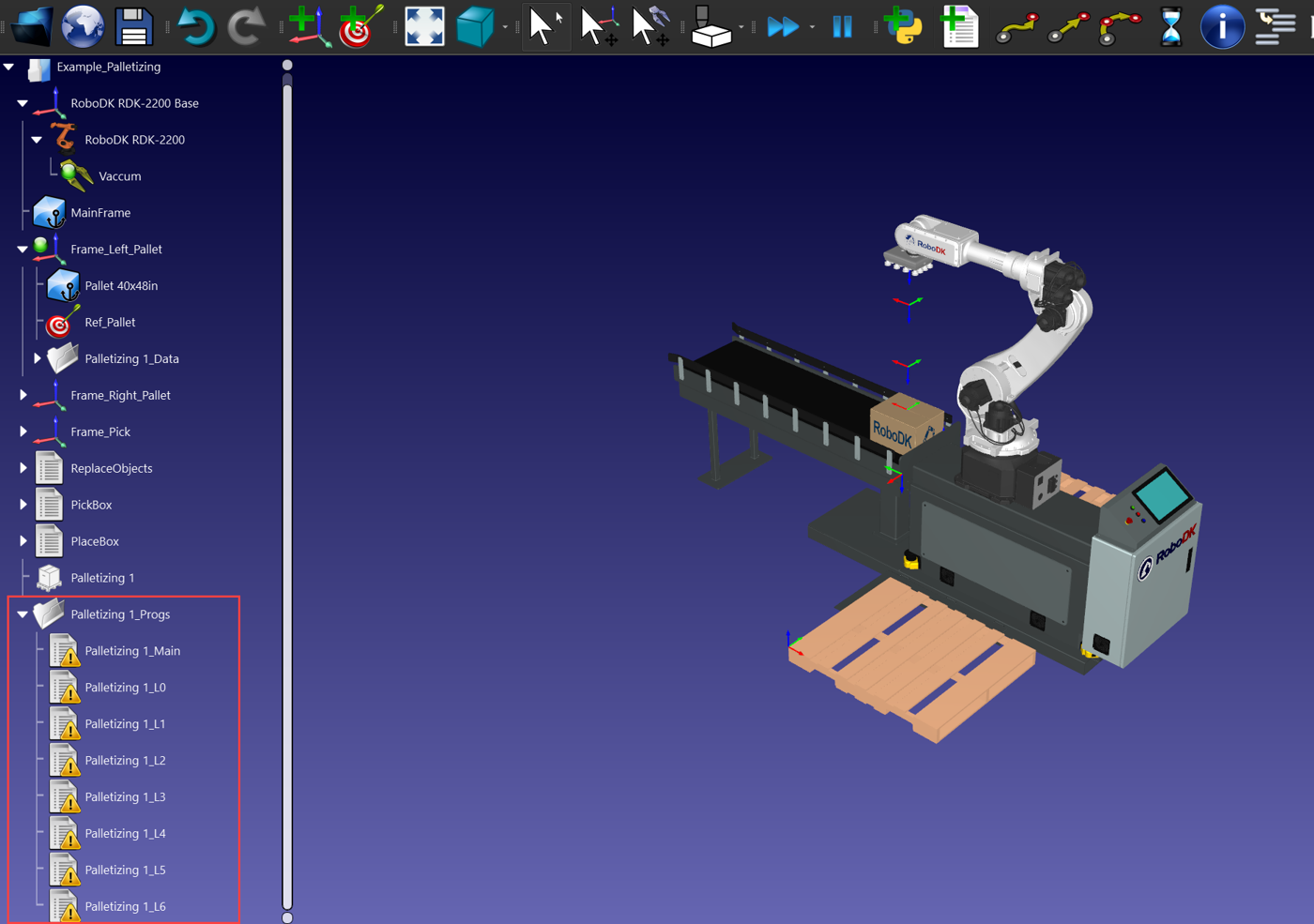
2.双击Palletizing_1_Main,运行主程序。如果运行正确,右击主程序,选择:生成机器人程序,创建机器人控制器可以执行的程序。