工作站准备
创建码垛项目前,需先在RoboDK中完成工作站配置:
提前加载以下内容:
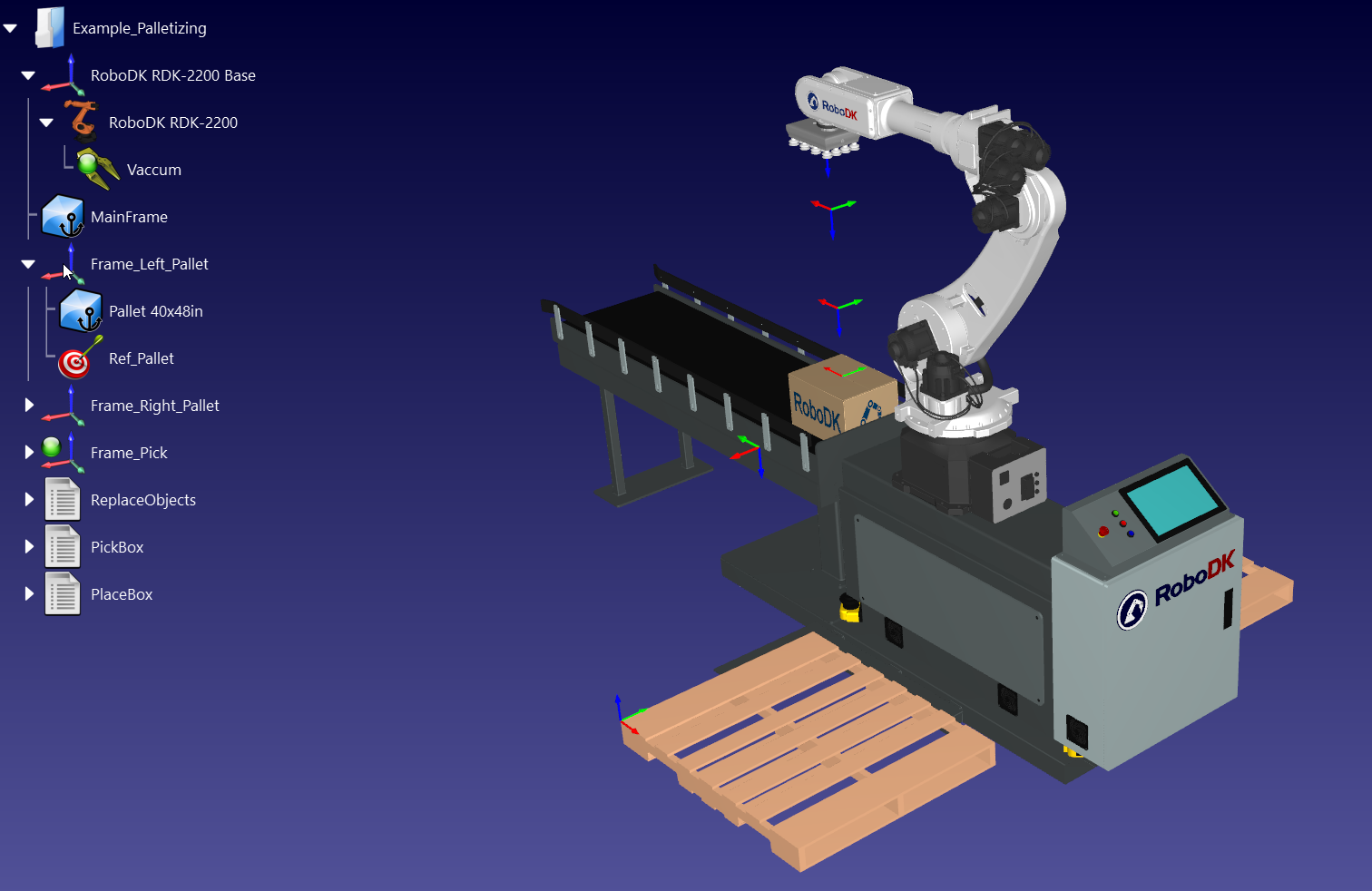
1.一个机器人、一个工具、一个箱、拾取参考坐标系(Frame_Pick)、托盘模型和托盘角点坐标系(Frame_Pallet)。加载传送带是可选项。
Note:本教程示例采用双托盘配置,所以我们设置了Frame_Left_Pallet和Frame_Right_Pallet两个参考坐标系。
Note:标准尺寸的箱体和托盘可从模型库直接下载。你还可以使用箱生成器插件创建自定义尺寸物料箱。
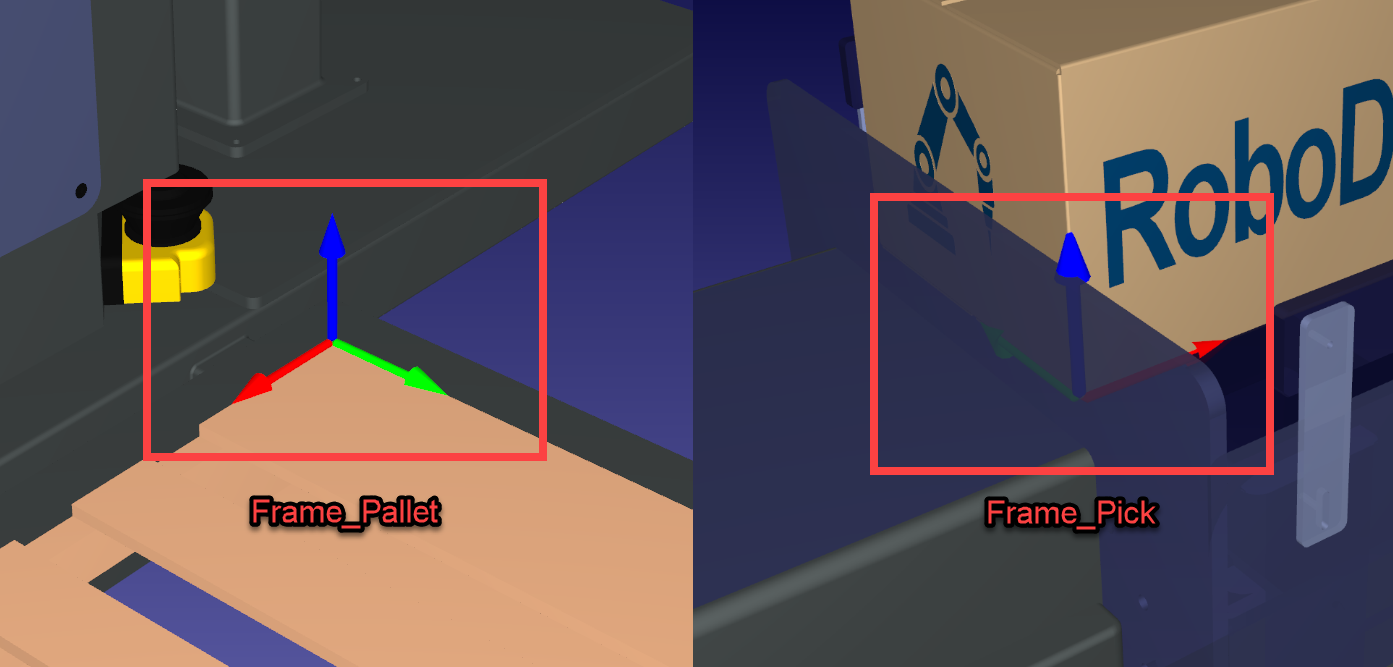
2.设置托盘坐标系:托盘坐标系的X+轴,需与托盘长度方向一致。
3.设置托盘坐标系:托盘坐标系的 Z+ 轴,需与托盘方向一致(朝上)。
4.关联坐标系:将托盘/箱体与对应坐标系关联,确保移动物体时机器人目标点能自动更新。
5.根据需要调整各物体/坐标系的位置。
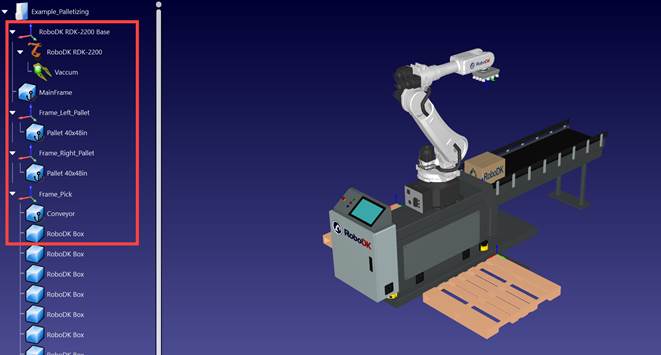
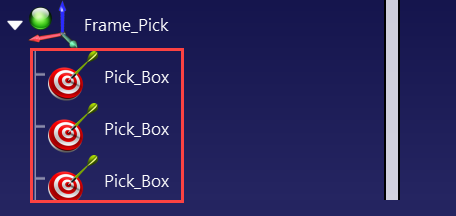
6.在Frame_Pick坐标系下复制多个箱体模型用于多次拾取。
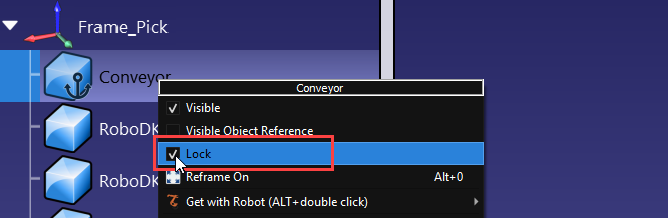
7.右键点击3D物体选择:锁定(箱体除外)。
Tip:有关在 RoboDK 中创建项目的资料,可以参考工作站章节。
Note:为简化示例,暂不包含传送带和外部轴配置(实际支持该功能)。
创建拾放程序
码垛向导要求提供两个子程序: 拾取程序(PickBox)和放置程序(PlaceBox)。PlaceBox程序仅用于将箱体从夹爪分离并关联至托盘坐标系,实际放置点由码垛插件自动生成。
创建步骤:
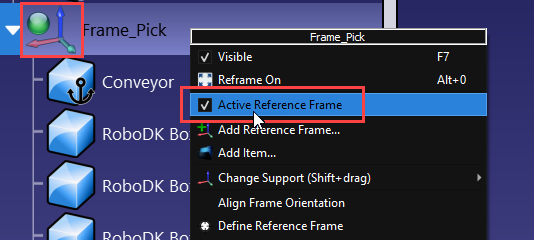
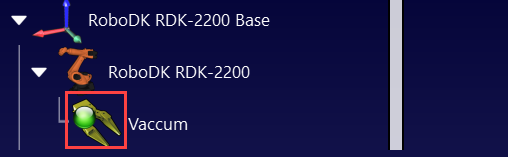
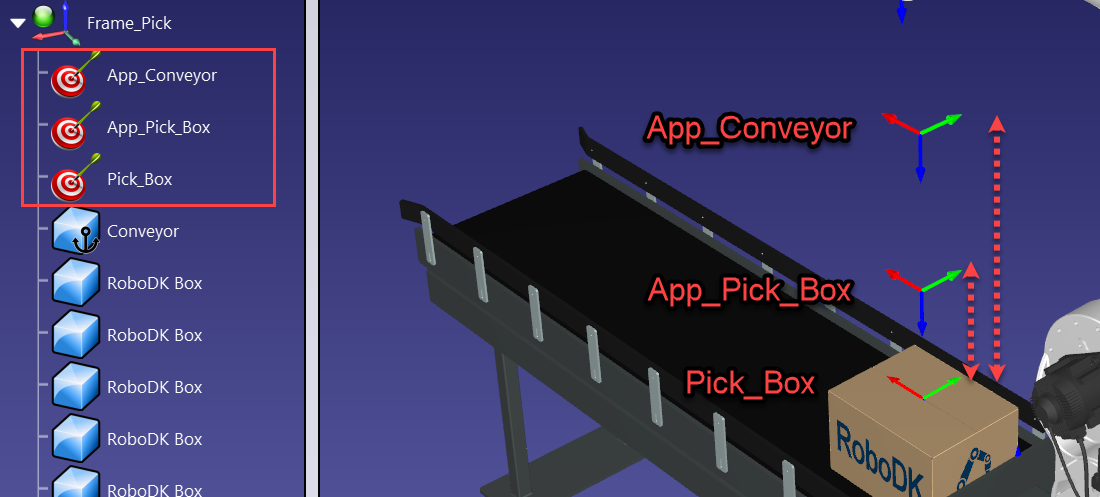
1.激活Frame_Pick坐标系和末端执行器(绿色圆圈标识)
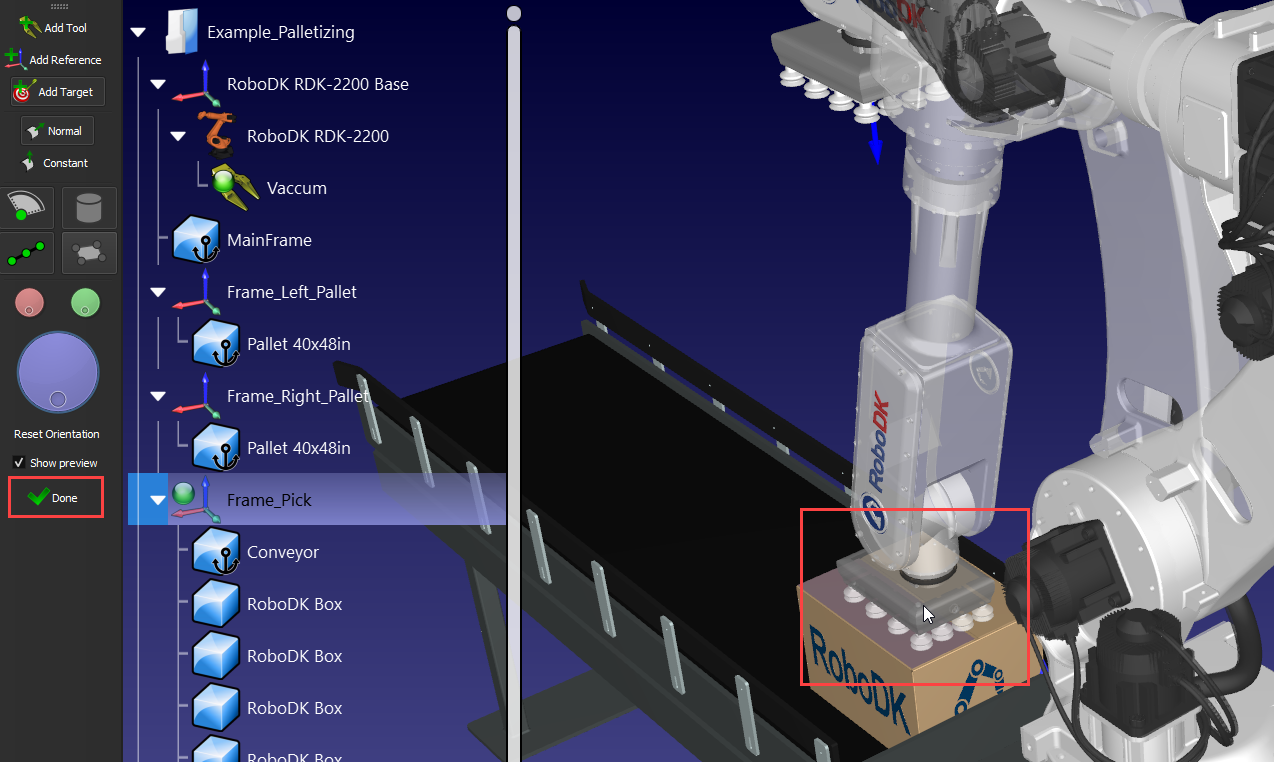
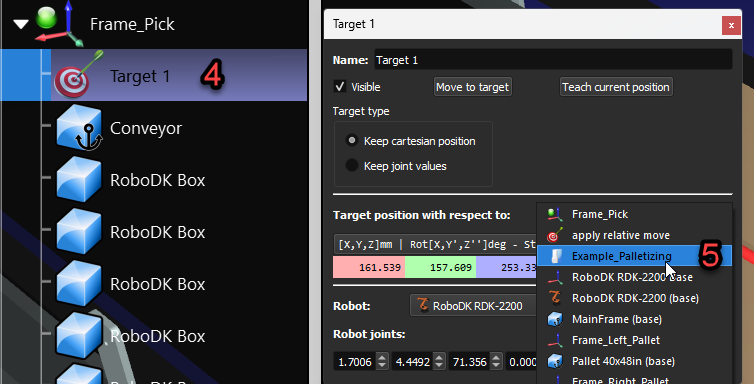
2.在"程序"选项卡选择"示教表面上的目标点",点击箱体顶部后确认
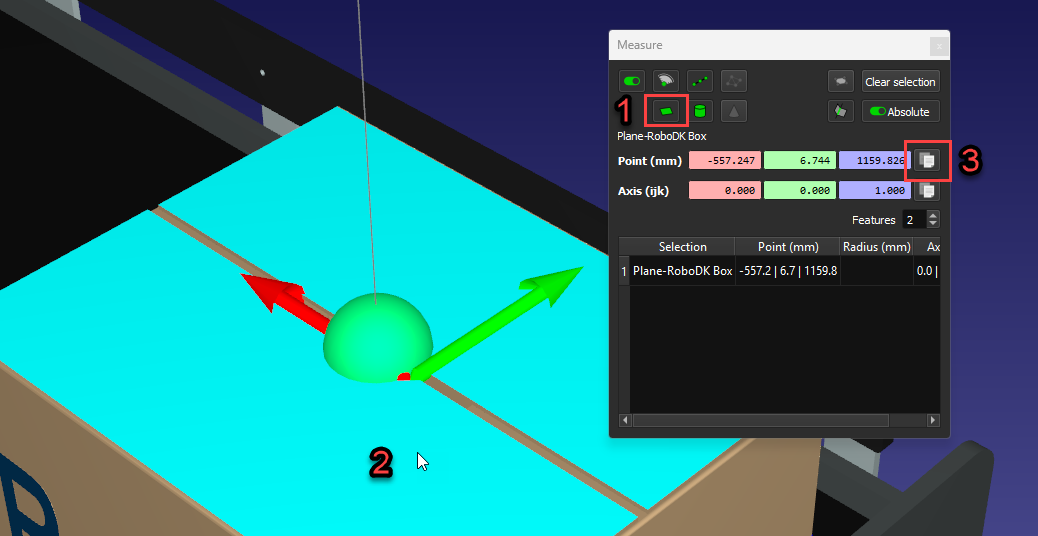
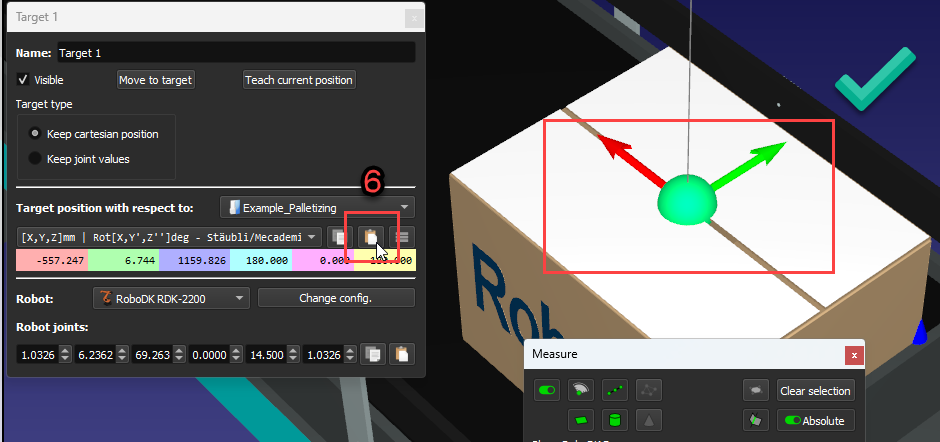
3.现在你需要在"Frame_Pick"底部设置第一个目标。为了确保它与箱体顶部居中,请按住 SHIFT+M 打开测量工具,然后点击箱体顶部并复制数值。然后点击目标,按F3,编辑目标参数。选择测站原点作为参考,然后粘贴数值。目标现在应该位于箱的中心。
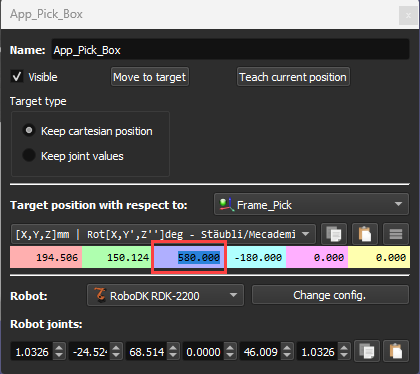
4.重命名目标点为Pick_Box,并复制两个副本:App_Pick_Box和App_Conveyor。然后,编辑目标参数并使用滚轮在 Z 值上添加一些距离,直到你对目标位置感到满意为止。
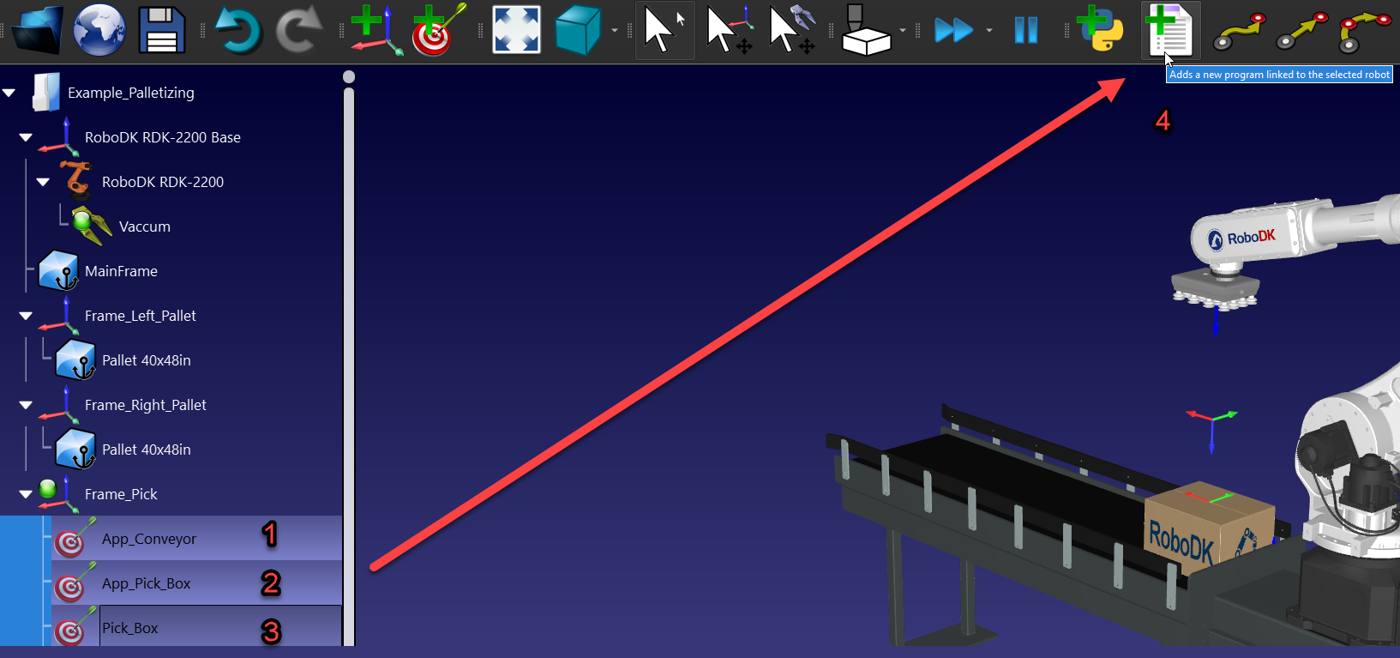
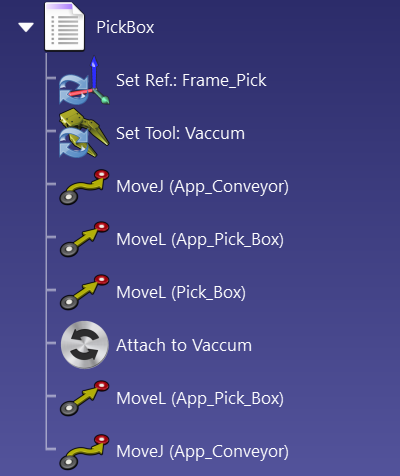
5.按住 CTRL 键,按照程序执行的顺序点击所有 3 个目标,右键打开菜单选择:创建程序。程序会自动添加目标、工具和参考坐标系。将程序重命名为 "PickBox"。
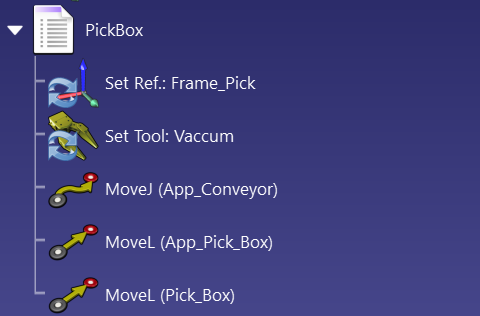
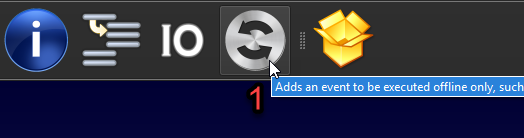
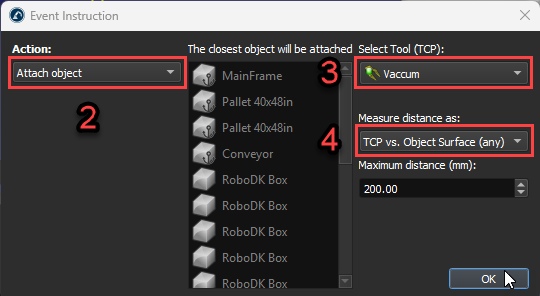
6.在工具栏中点击:事件指令的图标。在动作下拉选项中选择:Attach,测量距离选择:TCP与对象表面(任意)。当机器人执行到该事件指令时,会检测工具TCP与物体表面的接触,一旦满足条件就会将物体附加到工具上,实现虚拟环境中的拾取操作。这样就可以将箱附加到工具上。创建Attach事件后,复制粘贴"App_Pick_Box"和"App_Conveyor"目标点后,就完成了拾取程序的逻辑连接。
Tip:等待下一步(创建替换程序)后再进行测试。
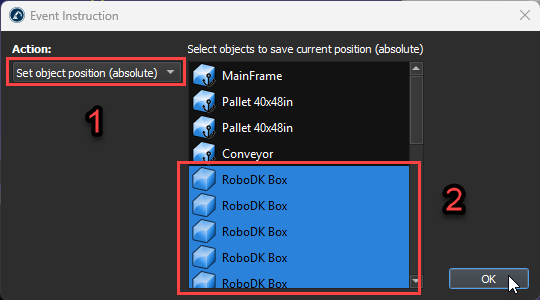
7.创建一个空程序,添加事件指令:Replace objects,在动作选择:Set object position(absolute)",然后按住alt键选择所有Box。运行该程序后,所有盒子会回到原始位置,方便重新开始仿真或测试。将程序重命名为 :ReplaceObjects。
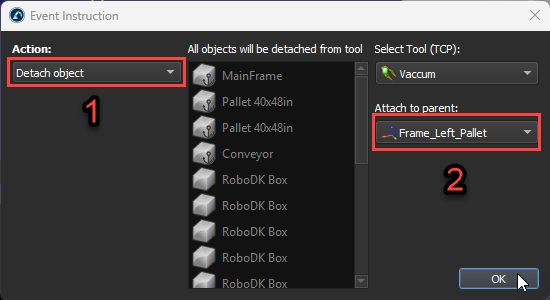
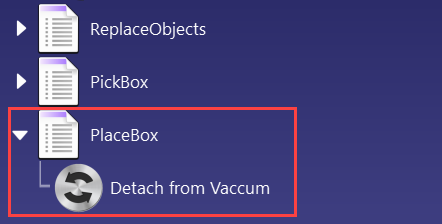
8.另外再创建一个程序,添加事件指令,动作选择:Detach object,然后连接上一级选择;Frame_Left_Pallet。将程序重命名为:PlaceBox。
9.最后,在托盘坐标系上方创建参考目标点,激活托盘的参考坐标系,将机器人移动到托盘上,确保机器人构型是合理的,然后创建新目标。将其重命名为 :Ref_Pallet。
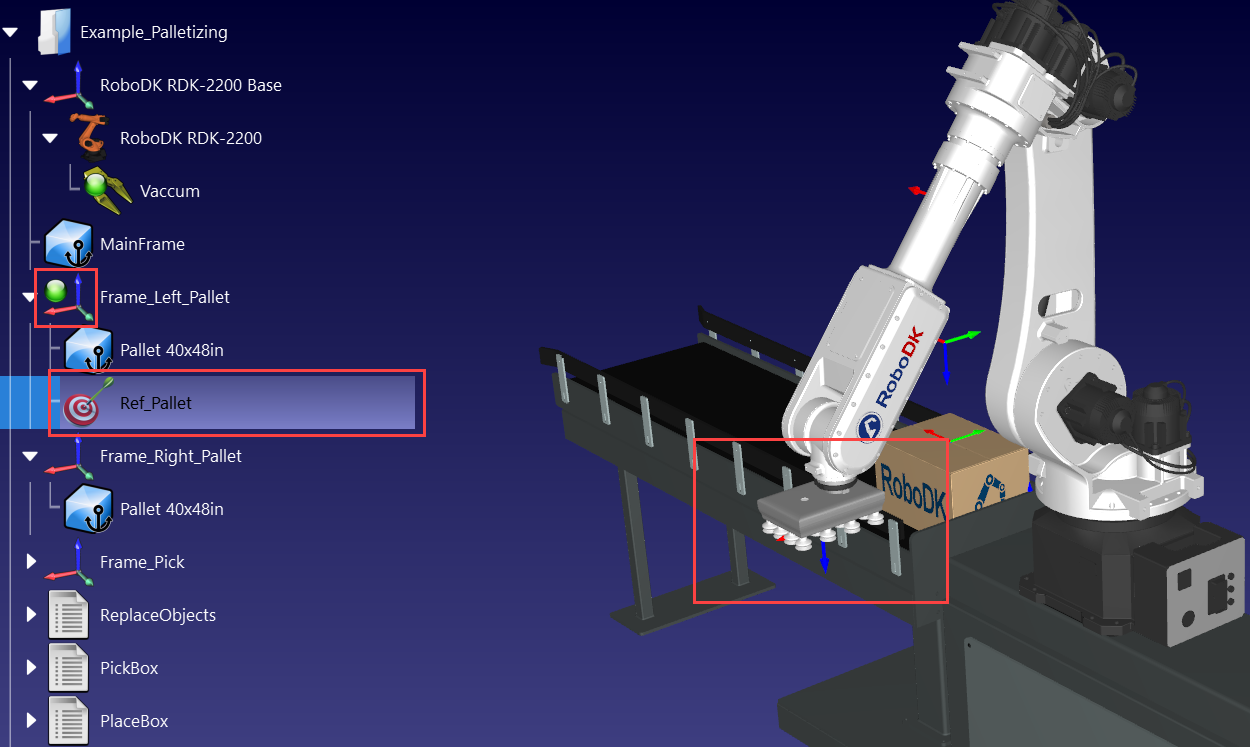
现在,我们已经准备好了创建码垛项目的内容。你的工作站应该是这样: