插件工具栏
BobCAD-CAM界面中,点击RoboDK选项卡访问以下功能:
Robot Setup
插件工具:
你可以替换机器人、修改工具和/或参考坐标系。例如,以下指导操作替换机器人:
1.右键点击:机器人
2.选择:替换机器人(如图所示)
3.从库中选择:新机器人
RoboDK默认只提供几个机器人,当然你可以从在线资源库选择你需要的机器人。
有关添加机器人工具的信息,请参考入门指南。
Note:按住Alt键:移动参考坐标系或机器人。这对于在工作站内移动机器人,或定位/定向机器人前方的部件有用。
按住Alt+Shift 键:移动机器人工具 (TCP)。这对于在示教目标前设置机器人的位姿有帮助。
在主菜单栏中选择:文件➔保存工作站 (Ctrl+S),保存项目。
Update Operations
插件功能:Update Operations,点击按钮,RoboDK 会将BobCAD-CAM中的加工路径同步至RoboDK:
如果程序对所选机器人可行,则会显示绿色对号。如果存在碰撞、奇异点或轴限位问题(双击查看详情),则会显示红色标记。
双击
右键单击程序后选择:运行,即可对其进行模拟(或双击程序)。你也可以选择:生成机器人程序(F6),获取需要加载到机器人控制器上的机器人程序。有关如何生成机器人程序的更多信息,请参阅离线编程章节。
如果需要,右键单击程序选择:选择后处理器,可以更改后处理器。这一步可以帮助你定制生成代码的外观。有关选择和自定义后处理器的更多信息,请参考后处理器章节。
Generate Program
插件功能:Generate Program,当RoboDK工作站完成后,点击该按钮就可以在BobCAD-CAM 上生成机器人程序。RoboDK将基于BobCAD-CAM的刀具路径生成最终机器人代码。
Note:若你需要对机器人程序进行编辑,按钮:生成选定的机器人程序,可让你快速更新机器人代码。建议在正常操作时使用:更新操作。
在 RoboDK 中按照以下步骤查看或修改机器人程序的位置:
1.选择:工具-选项
2.选择:程序选项卡
3.选择机器人程序文件夹旁:设置
Settings
通过设置按钮配置RoboDK插件选项。
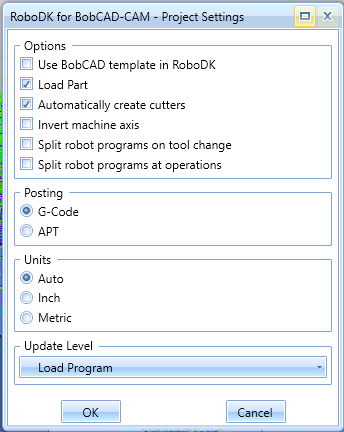
可调参数:
1.Use BobCAD template in RoboDK:界面风格,启用BobCAD-CAM模板以匹配原软件视觉效果。
2.Load Part:模型加载,自动更新零件:每次同步时加载最新CAD数据。仅加载可见实体。
3.Automatically create cutters:刀具轴方向,勾选反转机器结构轴适配Z轴向内的刀具
4.Posting:文件格式,使用 G 代码文件代替 APT 文件。RoboDK 可读取以下文件,生成机器人仿真和程序:
a.APT:推荐此项,原生BobCAD格式,兼容性最佳。
b.G-Code:此格式取决于您选择的后处理器,且主要设计用于配合三轴加工刀具路径使用。