插件工具栏
本章节介绍FeatureCAM中RoboDK插件功能。
●Auto Setup:会在RoboDK 中自动加载零件和机器加工程序。
●Load Part:会在 RoboDK 中自动加载零件的 3D 模型。
●Load NC Program:会在 RoboDK中自动创建机器人加工项目,模拟机器人并创建机器人程序,用于机器人加工。
·Generate Robot Programs:自动生成 RoboDK 中可用的机器人程序。
●Settings:设置。
●About :这里有帮助文档。
Auto Setup
插件功能:
一键创建 RoboDK 项目,包含默认机器人、工具和加工坐标系。
如果已打开RoboDK工作站,程序将使用现有项目,而不会覆盖机器人、工具或坐标系。
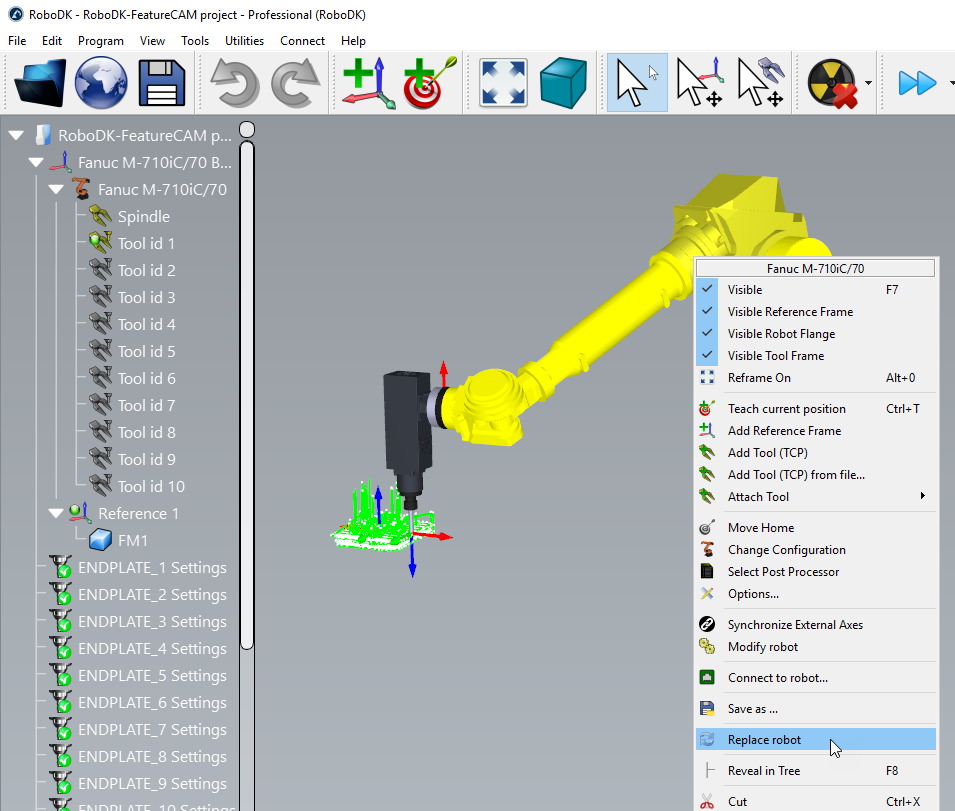
你可以替换机器人、修改工具和/或参考坐标系。例如,请按照以下步骤更换机器人:
1.右键点击:机器人
2.选择:Replace robot(如下图所示)
3.选择:要使用的机器人
RoboDK 安装程序默认只提供几个机器人,不过,可以从在线资源库下载更多机器人。
有关添加机器人工具的更多信息,请参阅入门指南章节。
Tip:按住Alt 键:移动参考坐标系或机器人。
Tip:按住 Alt+Shift 键:移动机器人工具 (TCP)。
在主菜单栏中选择:文件➔ 保存工作站 (Ctrl+S),得以保存项目。
更新机器人单元后,选择:实用程序➔更新机器人加工项目,即可更新程序。如果程序在当前单元参数下可运行,则会显示绿色复选标记。如果存在问题(如奇异点、轴限制或到达问题),则会显示红色标记。
双击
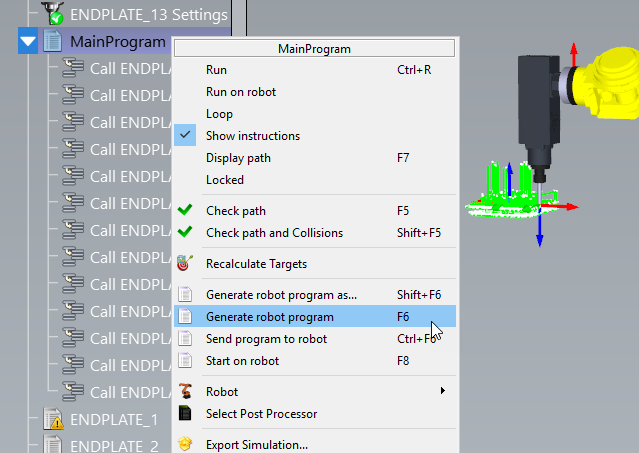
右键单击程序并选择运行(Run),即可对其进行模拟(或双击程序)。你也可以选择:生成机器人程序(F6),为机器人控制器生成机器人程序。有关如何生成机器人程序的更多信息,请参阅离线编程章节。
你也可以右键单击程序,选择:选择后处理器程序。有关后处理器的信息,可以参考后处理器章节。
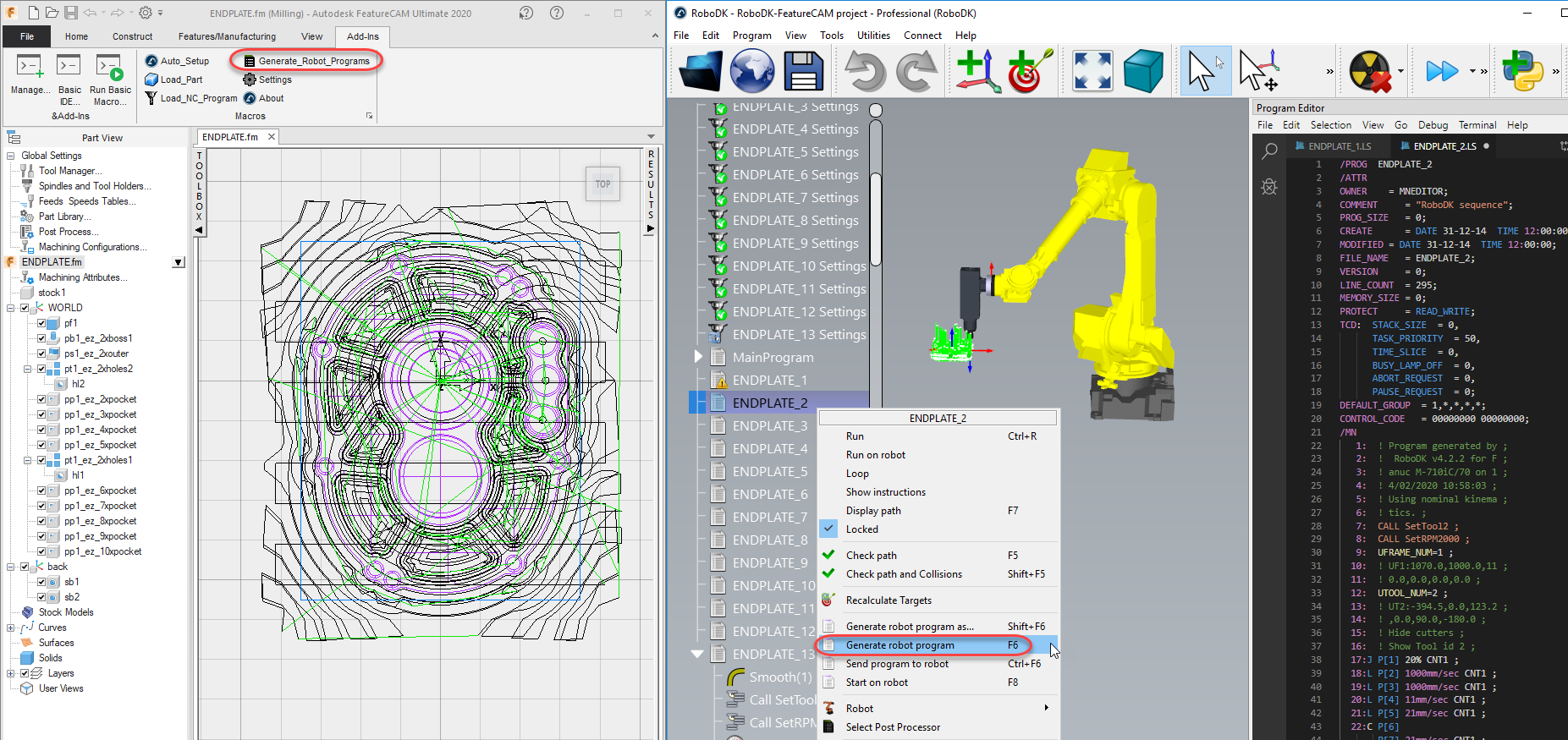
Generate Robot Programs
插件功能:Generate Robot Programs,该功能自动创建一个机器人加工程序。此操作将打开一个新窗口(程序编辑器)显示机器人程序。
Tip:如果使用不同机器人控制器,也可以右击 RoboDK中的程序选择:生成机器人程序/选择后处理器程序。可参考后处理器章节。
在RoboDK中更改保存机器人程序的位置:
1.选择:工具-选项
2.选择:程序
3.点击机器人程序文件夹旁的:设置
Settings
插件功能:Settings,这个功能是关于与RoboDK相关的FeatureCAM设置。你将看到下图所示的设置窗口。
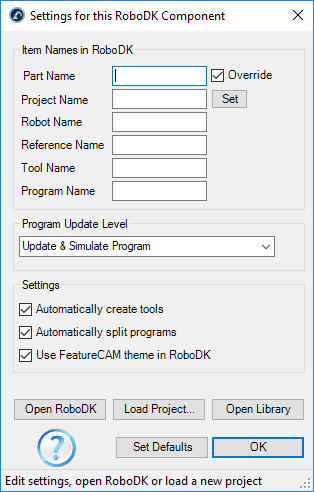
你可以修改以下选项:
1.Part name:零件名称是3D模型在 RoboDK 中加载时的名称。留空可自动使用 FeatureCAM 中使用的名称。
2.Project name:项目名称允许你指定一个RoboDK项目文件(RDK)。可以指定一个默认的RoboDK项目(RDK文件),以自动显示仿真结果或生成机器人程序。留空则自动使用 RoboDK 中当前打开的项目。
3.Automatically create tools:自动创建工具允许你根据在 FeatureCAM 中定义的刀架和刀具几何形状自动创建新的 TCP。机器人所持的第一把工具被视为刀架,新的 TCP 计算为刀架的偏移量。
4.Automatically split programs:自动分割程序将自动把完整的机器加工项目分割为子项目(操作)。为每个工具创建一个操作。
5.Use the FeatureCAM theme in RoboDK:在 RoboDK 中使用 FeatureCAM 主题将使RoboDK 中的 3D 导航和背景颜色与 FeatureCAM 风格一致。
你还可以为机器人加工操作指定工具坐标系和参考坐标系(基准)。
点击:Load Project...,就能预览最近打开的项目,或使用默认设置创建新项目
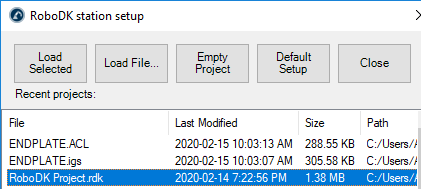
有以下选项
●Load Selected:加载RoboDK(RDK文件)中使用的先前项目。
●Load File…:选择RoboDK工作站文件(RDK)以用RoboDK打开,并将其作为当前FeatureCAM项目的默认项目使用。
●Empty Project:打开RoboDK并新建一个空工作站以构建新项目配置。有关从头开始设置新项目的更多信息,请参阅入门指南章节。
●Load Part:将零件从FeatureCAM加载到RoboDK(部件将保存为STL文件并自动加载)。
●Default Setup:使用默认机器人、主轴和参考坐标系新建工作站,零件将自动导出至RoboDK。
了解有关创建机器人加工设置的信息,参考机器人加工章节。