插件设置
选择:ROBODK ADD-IN,这里可以更改插件的设置。
Note:这些 RoboDK 设置会随文件保存。
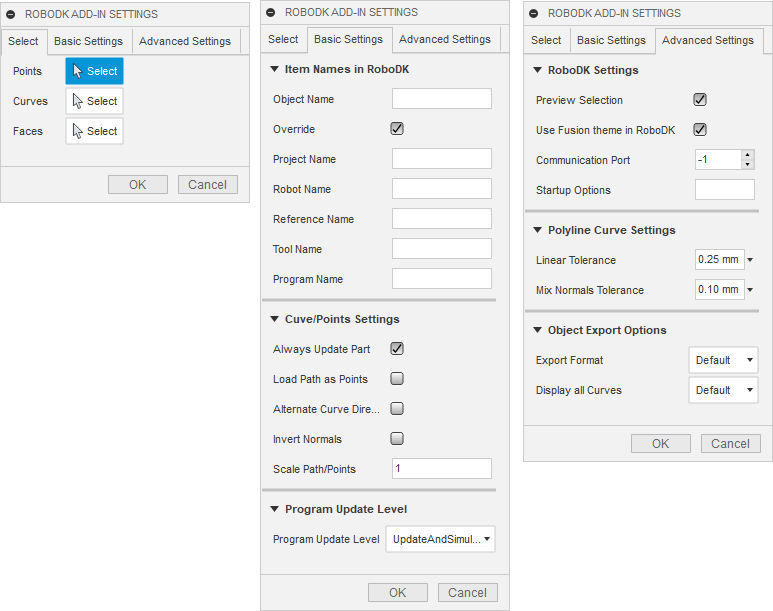
基本设置:
●Object Name - 设置将载入 RoboDK 的曲线/点物体名称。如果此处留空,则将使用零件或组装文件的名称。
●Override - 如果名称匹配,则覆盖先前在RoboDK中加载的对象。
●Project Name - 设置要使用的 RoboDK 项目/站(.RDK 文件)的名称/路径。如果文件已加载,则将使用现有项目。如果RoboDK 中打开的项目与文件名不匹配,则会在指定了完整路径的情况下打开项目。
●Robot Name - 设置将在 RoboDK 中使用的机器人名称(如果你的项目中有多个机器人)。机器人名称必须与RoboDK工作站树中显示的名称一致。保留此值为空(默认)以使用第一个或唯一可用的机器人。
●Reference Name - 设置参考坐标系名称以确定路径相对于机器人的位置。该名称应与RoboDK工作站树中显示的名称一致。如未提供名称,则将使用当前启用的参考坐标系
Tip:如果要自动使用编号参考坐标系,可以在名称末尾添加参考编号。例如:"Reference 1"。
●Tool Name - 设置与机器人配合使用的工具 (TCP) 的名称,以便沿着路径运行。该名称应与 RoboDK 工作站树中的可见名称一致。如果未提供名称,则将使用激活工具坐标系
Tip:如果要自动使用编号工具,可以在名称末尾添加工具编号。例如:Tool 1。
●Program Name - 设置将生成的程序文件名称。
Note:请务必选择生成程序和代码选项,以便查看程序。
●Always Update Part- 选中此选项可始终将3D模型从 Fusion 更新到 RoboDK。这将在你选择曲线或点时更新零件。
●Load Path as Points - 选中此选项可曲线转换为点,从而在 RoboDK 中创建点跟踪项目。这对钻孔等制造操作非常有用。取消选中该选项,则可将路径加载为曲线跟踪项目。
●Alternate Curve Directions - 选中此选项可交替每次移动的方向(之字形模式)。
●Invert Normals - 选中此选项可反转计算出的表面法线。这将翻转机器人的工具方向。
高阶设置:
●Use Fusion 360 Theme in RoboDK - 使用Autodesk Fusion 360主题启动RoboDK。这包括更改3D导航鼠标的行为和背景颜色。这些设置可在RoboDK菜单中更改:工具-选项。
●Communication Port - 设置与 RoboDK 通信的通信端口。如果使用不同的端口,RoboDK 的多个实例可以同时运行,并使用不同的设置。当此值设置为-1(默认)时,将使用默认端口(20500)。
●Startup Options - 设置RoboDK首次启动时传递给它的参数。例如,要安静地启动 RoboDK,可以设置"/NOSPLASH /NOSHOW /HIDDEN"。即使不显示 RoboDK,仍可生成程序。更多信息请参见 RoboDK API 的命令行部分。
●Linear Tolerance (mm) - 设置线性精度,将曲线分割为一组点。
●Mix Normals Tolerance (mm))- 设置用于在多个表面之间混合法线计算的距离公差。
●Export Format - 选择导出格式,以便在 RoboDK 中加载零件。
●Display all object curves - 已加载到 RoboDK 中的曲线,即使这些曲线未被选中。你可以在 RoboDK 中更换此设置(工具-选项-显示-显示曲线)。