Settings
选择 RoboDK Settings
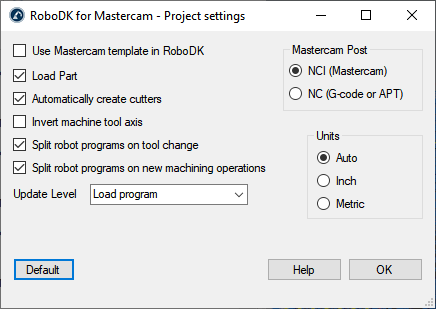
除其他外,你还可以修改以下选项:
1.Use the Mastercam template in RoboDK:启用后,RoboDK的3D视图风格与Mastercam保持一致(需要在RoboDK中按照以下路径取消勾选:工具➔选项➔其他➔忽略来自第三方应用程序的更改设置)。
2.Load Part:每次生成新操作时同步Mastercam中的可见模型。
3.Automatically create tool cutters:根据机器人首工具(Tool Holder)和TCP长度生成刀具。
4.Invert machine tool axis:适配刀具Z轴朝内(默认朝外)的特殊机床。
5.Mastercam Post:
a.NCI文件(推荐):直接解析Mastercam原生路径
b.NC文件(G代码/APT):支持解析钻孔循环等长格式代码。