Robot setup
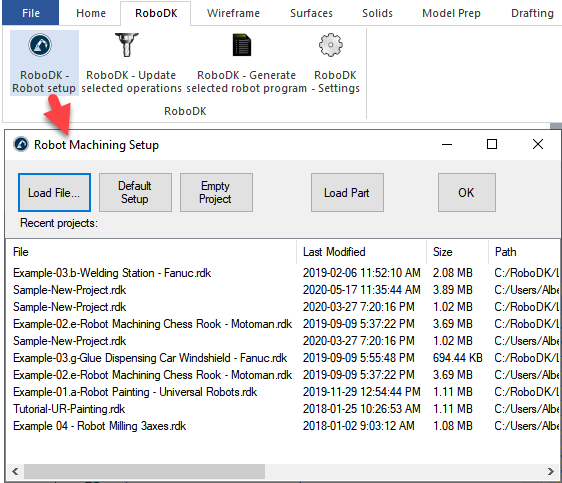
Robot Setup
●Load File.....:选择RoboDK工程文件(.rdk)。
●Default Setup:自动创建包含机器人、主轴(TCP工具)和参考坐标系的新项目,并导出Mastercam中的零件模型。
●Empty Project:手动搭建工作站(详见入门指南)。
●Load Part:将Mastercam中的可见实体/曲面以STL格式导入RoboDK。
更多有关构建新装置部分详见机器人加工章节。
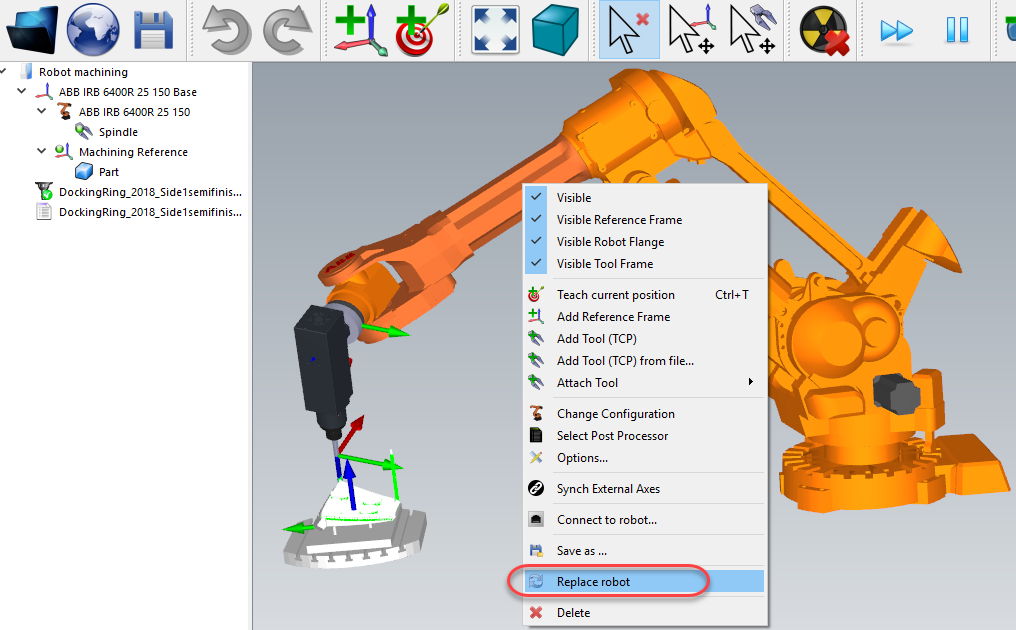
你还可以更换机器人、修改工具和/或参考坐标系。例如,请按照以下步骤更换机器人:
1.右键点击机器人
2.选择替换机器人(如图所示)
3.选择新机器人
RoboDK 安装程序默认只提供几个机器人,不过,可以从在线资源库下载其他机器人。
更多有关添加机器人工具的信息详见入门指南。
Tip:按住 Alt 拖动参考系或机器人(调整位置)。这对于在工作站内移动机器人或定位/设定机器人前方的部件非常有用。
按住 Alt+Shift 移动工具(TCP)。这对于在示教目标前设置机器人的位姿非常有用。
选择文件➔ 保存工作站 (Ctrl+S),完成保存项目。