RoboDK Plugin for Mastercam
本示例说明如何使用Mastercam插件创建3轴机器人加工项目。
视频:该视频显示了本节中介绍的相同步骤:https://www.youtube.com/watch?v = tArHbCS2HK8。
1.将零件加载到Mastercam中。
2.使用Mastercam Mill工具创建工具路径。

3.在RoboDK中使用机器人,主轴和任何其他必需的对象创建一个工作站。

4.在RoboDK插件标签中,选择RoboDK ➔ 机器人设置。
5.在“机器人加工设置”窗口中,选择“加载零件”。

6.在RoboDK中,根据需要调整“加工参考参考”框架的位置。
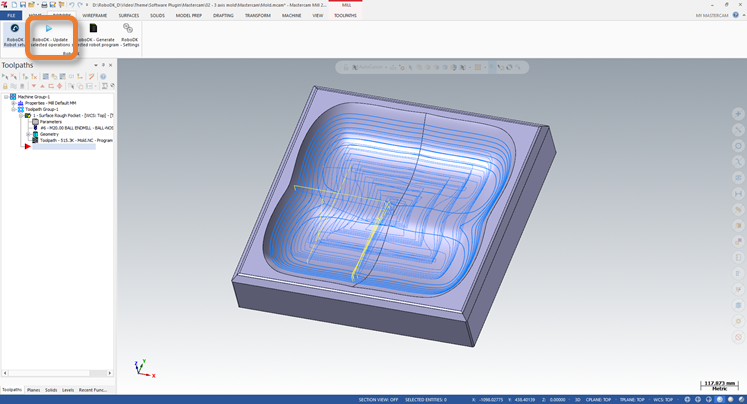
7.在RoboDK插件标签中,选择RoboDK ➔更新选定的操作。

8.在RoboDK中,在“机器人加工项目”窗口中选择“更新和模拟”。

9.如果需要,可沿路径修改工具的方向。
